基于自抗擾控制技術的船舶航向自動舵控制方法研究
2016-10-14 00:58:07黃志堅
船電技術 2016年11期
劉 曉,黃志堅,張 贊
?
基于自抗擾控制技術的船舶航向自動舵控制方法研究
劉 曉,黃志堅,張 贊
(上海海事大學,上海 201306)
本文基于線性Nomoto船舶運動模型,以傳統PID控制器為基礎,考慮到船舶自身狀態和外界未知干擾對船舶航向系統的影響,對船舶航向自動舵控制系統引入自抗擾技術,建立以自抗擾控制方法為基礎的船舶航向控制系統。最后利用Simulink仿真軟件搭建系統的仿真模塊,對改進的船舶航向控制系統的性能進行仿真驗證。結果表明該方法具有較強魯棒性、抗干擾性,解決了超調性與快速性之間的矛盾。在應對海上復雜的環境時有良好的動態性能和穩態性能。
船舶自動舵 自抗擾控制器 傳統PID控制 Simulink
0 引言
船舶在航行時會受到自身狀態和外界不確定因素如風、浪、流等的影響,這些未知擾動對船舶航向自動舵的控制性能提出了很高的要求。目前船舶航向自動舵的控制器主要應用PID 控制方法,PID控制方法的原理是根據系統的輸出信號和輸入信號的誤差及其微分、積分的線性組合來產生控制信號[1]。由于船舶自動舵系統的強耦合性和航行環境的不確定性等因素,在給出控制信號后,控制器產生反應到船舶自動舵的開始運動之間會產生時間延遲,使得傳統PID控制器出現了超調性和快速性之間的矛盾。這些問題的存在使其不能很好的適應船舶航向的控制。
本文的主要目的是基于線性 Nomoto 船舶運動模型[2],對船舶航向自動舵控制系統提出一種基于自抗擾技術的控制方法。該方法充分吸收PID控制方法的思想“基于誤差消除誤差”,加入特殊的非線性效應。從而產生了以下兩個重要優點:1)有效解決了快速性和超調性之間的矛盾,提高了控制精度;2)應用范圍廣,具有一定的自適應性和魯棒性。
1 傳統PID自動舵數學模型[3]
在早期傳統PID控制器中舵角的控制方程為
式中:是航向偏差信號;是比例系數。為避免控制效果產生振蕩,的取值盡量要小。
比例控制在船舶低速穩定航行時控制效果基本上能夠滿足船舶航行的控制需求。但對于不穩定航行的船舶,只有比例控制是不夠的,應加入航向偏差的微分項。控制方程為

式中:K為控制器的積分系數。由于海上航行環境惡劣復雜,外界未知擾動會使得自動舵偏離期望的設定值而產生靜態誤差,為保持船舶沿著設定航向角航行,還要加入航向偏差的積分項。控制方程為
(3)
式中:K控制器的微分系數。
控制參數KKK通過PID整定方法進行整定,整定好后能夠使自動舵保持較好的操縱性。PID控制器的參數確定后在控制過程中保持不變。當船舶的動態特性或外界條件發生變化時,PID控制器不能同時跟蹤設定航向角和消除外界擾動,控制效果不能達到預期。
本文采用的是日本學者野本謙作教授提出的線性船舶操縱數學模型,即著名的Nomoto模型,其數學模型為
式中,表示船舶航向角,表示舵角,為系統參數。傳統PID船舶自動舵系統結構如圖1所示。
2 自抗擾控制器(ADRC)
自抗擾控制技術(ADRC)是由韓京清教授首次提出的一種非線性控制技術,這種技術能夠根據未知的非線性復雜系統模型,只根系統的輸入和輸出信息,對系統的未知擾動進行實時補償和估計。自抗擾控制具有優良的控制效果及抗干擾能力。以自抗擾控制器的對象為二階次,則其整體結構圖如圖2所示:
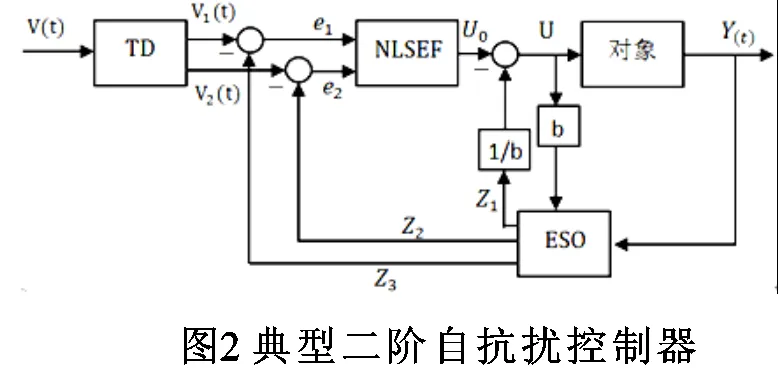
1)跟蹤微分器(TD)。輸入信號為設定值(),TD根據輸入信號以及受控對象的特性安排過渡過程,輸出信號為輸入信號跟蹤值及其微分信號。TD可以解決系統快速性和超調性之間的矛盾。TD常用形式為
(5)
式中:()表示輸入信號;表示積分步長;(V,V,,)表示非線性函數。TD的正定參數為、。
2)擴張狀態觀測器(ESO)。ESO作為自抗擾控制器的主要部分,它不僅能估計系統的各個狀態量,而且能夠實時估計模型內部和外部擾動的作用值并在反饋中給出控制量對總擾動進行補償。ESO 一般形式為

式中:()表示非線性函數;表示控制量,表示常系數;1,2表示信號y的狀態估計量;3表示總干擾估計信號。ESO的正定參數為{α,α,β,β,β,δ}。
3) 非線性狀態誤差反饋規律
(NLSEF)NLSEF給出被控對象的控制策略。它是跟蹤微分器(TD)的輸出狀態量和擴張狀態觀測器(ESO)產生的狀態變量估計之間的誤差的非線性組合,NLSEF 一般形式為:
NLSEF的整定參數為{ααββδ}。
自抗擾控制器的參數一經整定,參數的變化對控制效果的影響不大,因此比較容易的得出自抗擾控制器的參數。
3 基于自抗擾技術的自動舵控制
本文將自抗擾技術引入船舶航向自動舵中的控制器部分,用一種基于自抗擾技術的控制器代替傳統的PID控制器,其系統結構如圖3所示:TD用于跟蹤船舶航向角設定的值及其微分信號;ESO的作用是根據舵角δ和實際航向,對船舶航行自身狀態和未知擾動總和進行跟蹤估計;NLSEF為TD的輸出值和ESO產生的狀態變量估計之間誤差的非線性組合,根據未知擾動的估計信號可得出控制量進行擾動補償。
4 基于Simulink的仿真
利用MATLAB/Simulink仿真軟件,建立基于自抗擾技術的船舶航向自動舵系統的仿真模型。對所提出的船舶航向自動舵的控制性能進行仿真驗證。
本文采用大連海事大學“育龍”實習船為例進行仿真研究,船舶具體參數為:柱間長126 m,船寬21.8 m,滿載吃水8.0 m,方形系數0.681,船舶初始速度為7.2 m/s,根據已知參數,計算得=261.73,=0.42。則線性Nomoto船舶運動模型可以表示為
在傳統PID控制參數中,取=0.06,=0.9。根據傳統PID船舶航向自動舵的參數整定方法,PID設計參數為=2.2434,=0.0135,=64.9210。自抗擾整定參數為TD的=0.004,=0.01; ESO 的{0.01,0.01,100,200,500,0.01,0.01};NLSEF 的{1.75,0.25,50,20,0.01}。圖3為船舶低速穩定航行,設定外界條件為沒有風浪干擾,當設定航向為10°時,船舶航向跟隨時間的變化曲線,圖中虛線為傳統PID控制器的仿真結果。從圖3中可以看出,自抗擾控制器的變化曲線超調量小,響應速度快,達到給定航向的時間與PID控制器相比大大縮短,一定程度上解決了PID控制器存在的快速性與超調性之間的矛盾。
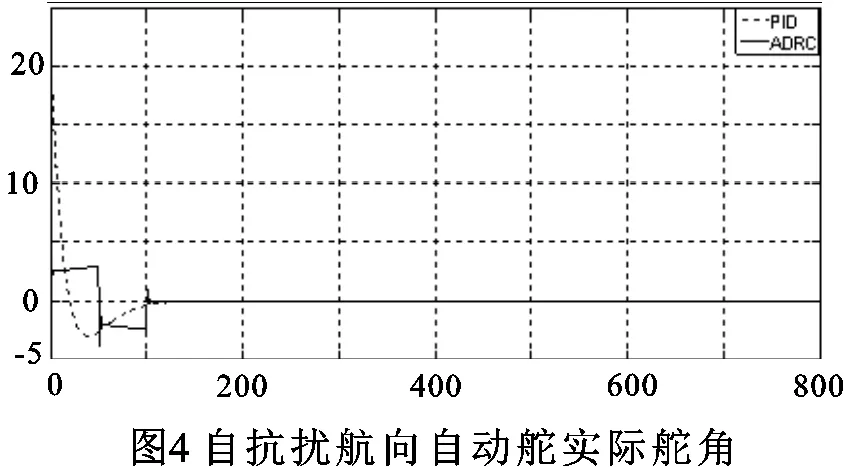
圖4為舵角的變化,仿真結果表明,基于自抗擾技術的自動舵航向誤差最后也是趨于零,說明基于自抗擾技術設計的控制器具有較好魯棒性。
5 結論
本文首先介紹了傳統PID航向自動舵的數學模型,以線性Nomoto船舶運動模型為基礎,考慮到船舶自身和外界環境引起的未知擾動,提出了用自抗擾控制器替代傳統PID控制器。從MATLAB/Simulink軟件的仿真結果得出了以下結論:基于自抗擾技術的航向控制系統在保證快速性的同時一定程度上抑制了系統的超調性;同時在惡劣海況下表現出較好的魯棒性和自適應性,應用范圍廣泛。
參考文獻:
[1] 韓京清. 非線性PID控制器[J]. 自動化學報, 1994, 20 (4): 487-490.
[2] Nomoto K.Taguchi T. Honda K ea al. On the steering Qualities of ships[J]. Shipbuilding Progress. 1957,4(35):354.
[3] Fossen T.I. Guidance and control of ocean vehicle. 1994.
Active Disturbance Rejection Control Technique for Ship’s Course Autopilot Control
Liu Xiao, Huang Zhijian, Zhang Zan
(Shanghai Maritime University, Shanghai 201306, China)
TU997
A
1003-4862(2016)11-0040-03
2016-06-15
劉曉(1992-),男,碩士研究生。研究方向:自抗擾控制方法。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國船檢(2017年3期)2017-05-18 11:33:09
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00