基于多普勒頻偏估計的單幀圖像低速運動目標檢測方法
2016-10-14 01:29:43黃聰劉寅
電子與信息學報 2016年7期
黃 聰 劉 寅
?
基于多普勒頻偏估計的單幀圖像低速運動目標檢測方法
黃 聰*劉 寅
(中國艦船研究設計中心 武漢 430064)
常用的圖像域運動目標檢測跟蹤方法對虛警率較敏感,當虛警率較高時,目標檢測跟蹤的實時性受限。為了降低目標初始檢測的虛警率,進而提高目標檢測跟蹤的實時性,該文提出一種基于多普勒頻偏估計的單幀圖像低速運動目標檢測算法,通過發射多普勒不敏感的LFM脈沖對,忽略多普勒效應對成像結果的影響,但在圖像域檢測的同時,利用目標回波的多普勒頻偏信息進行靜目標和雜波亮點的剔除,基于單幀數據,減小運動目標檢測的虛警率,實現單幀圖像的運動目標檢測,從而為目標跟蹤奠定良好基礎。該算法首先進行圖像域的恒虛警檢測,再利用寬帶時域波束形成和復相關頻率測量法,對檢測亮點處的波束輸出信號進行多普勒測頻,僅通過單幀圖像就可有效剔除靜目標和雜波亮點。同時為了改善寬帶時域波束形成的性能,利用2階錐規劃設計濾波器的系數,用9階FIR濾波器實現了0.01倍采樣點的小數時延,提高了多普勒頻偏的估計精度。最后通過計算機仿真和水池試驗驗證了所提算法的有效性。
2維成像;動目標檢測;多普勒頻偏估計;小數時延
1 引言
對于運動目標探測,當發射信號為多普勒敏感信號時,目標回波與本地信號存在多普勒失配,為了有效進行目標檢測,需要對目標回波進行多普勒補償,但目標速度的不確定性給多普勒補償帶來了困難,因此,通常選用多普勒不敏感信號作為發射信號。例如,對于速度僅為1~2 m/s的蛙人[1,2]等低速目標,選用多普勒不敏感信號進行成像時,多普勒效應對成像結果的影響可以忽略,進而可以進行圖像域的目標檢測和跟蹤。
常用的圖像域運動目標檢測跟蹤方法一般可以分為先檢測后跟蹤(Detect Before Track, DBT)和檢測前跟蹤(Track Before Detect, TBD)[3,4]兩大類。其中,DBT算法先對單幀圖像進行檢測,獲取目標亮點,再通過多幀圖像進行點跡關聯動目標跟蹤;而TBD算法先對目標回波進行多幀累積的聯合處理,再利用時間維度上的累積航跡進行動目標跟蹤。這兩種檢測方法都是基于多幀圖像處理的,其運算量對目標初始檢測的虛警率非常敏感,當初始檢測虛警率較高時,其運算量會成倍地增加,無法滿足實時性較高的檢測跟蹤需求。為了提高動目標檢測跟蹤的實時性,則有必要降低目標初始檢測的虛警率。為此,本文提出了一種基于多普勒頻偏估計的單幀圖像低速運動目標檢測方法,發射多普勒不敏感的LFM脈沖對,忽略多普勒效應對成像帶來的影響,在圖像域檢測的同時,利用目標回波的多普勒頻偏信息對靜目標和雜波點進行剔除,降低單幀圖像檢測的虛警率,實現單幀數據的運動目標檢測,從而為目標跟蹤奠定良好基礎。
2 基于多普勒頻偏估計的單幀圖像運動目標檢測
本文提出了一種基于多普勒頻偏估計的單幀圖像運動目標檢測算法,在忽略多普勒效應對成像影響的同時,通過對目標回波的多普勒頻偏估計,進一步減小動目標檢測的虛警率,為后續的目標跟蹤帶來便利。具體的流程圖如圖1所示。
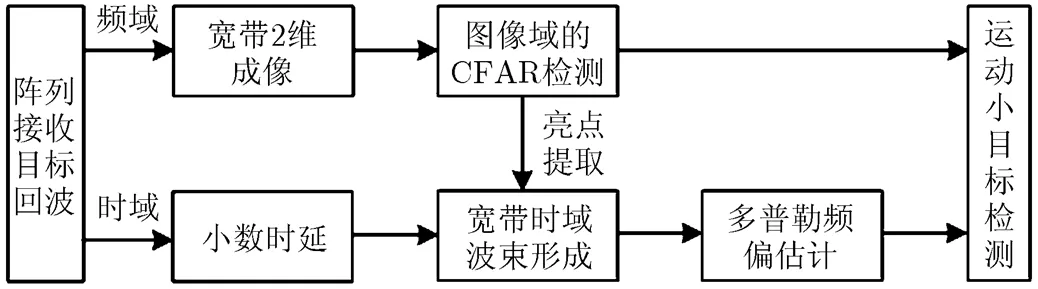
圖1 算法流程圖
2.1 寬帶2維聲成像算法
對運動目標而言,目標回波中包含多普勒頻偏。為了保證2維成像脈沖壓縮的相關增益,同時避免目標速度不確定性給多普勒補償帶來的困難,并有利于后續的寬帶多普勒頻偏估計,此處選用多普勒不敏感的LFM脈沖對作為發射信號。LFM脈沖對信號由兩個相同的LFM脈沖組成,單個LFM的脈寬為2 ms,頻帶為90~110 kHz,其模糊函數[5]如圖2所示。由圖2可以看出,LFM脈沖對信號具有多普勒不敏感的特性,在多普勒頻偏為100 Hz時,相關能量只下降了2 dB。
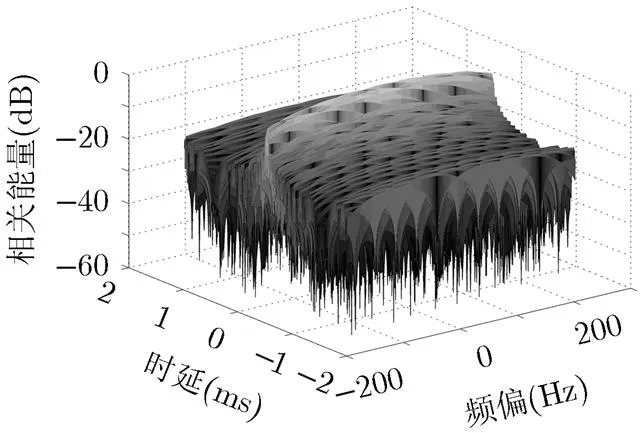
圖2 LFM脈沖對信號的模糊度圖
寬帶2維成像[6,7]先根據掃描位置對脈沖壓縮后的信號在時域上進行滑動窗處理,再對滑動窗內截取的信號進行頻域波束形成,得到距離和方位的2維聲圖像,其流程圖如圖3所示。

圖3 寬帶2維成像的流程圖
最后,進行寬帶頻域波束形成,得到距離和方位的2維成像結果為
在低速運動的目標探測中,利用發射信號多普勒不敏感的特性,可以忽略目標回波多普勒頻偏對2維成像的影響,同時估計出目標的距離和方位。為了獲得目標的距離和方位信息,需要先對2維成像結果進行圖像域的目標檢測。2維聲圖像的CFAR檢測[8]在檢測出目標亮點的同時,可能產生大量的虛假亮點,給后續檢測跟蹤算法的實時性帶來較大影響。為進一步減小動目標檢測的虛警率,本文通過檢測亮點位置的多普勒頻偏估計,對圖像域中的靜目標和雜波點進行剔除。
2.2 LFM脈沖對的多普勒測頻算法
本節通過復相關頻率測量法對CFAR檢測亮點處的波束輸出信號進行多普勒頻偏估計。假設目標正對接收陣的徑向速度為,相對于中心頻率的多普勒頻偏,為包含多普勒頻偏的回波信號,LFM脈沖對的多普勒測頻流程圖如圖4所示。其中,和分別為正交解調信號,,。

圖4 多普勒測頻流程圖
將式(6),式(7)代入到式(5)中可得
由式(9)可以看出,多普勒頻偏估計可以利用復信號相關函數的相位在處的導數來計算。由于為奇函數,可得
由反正切函數的性質可得
下面對算法進行計算機仿真,仿真條件為:發射LFM脈沖對信號,單個LFM的脈寬為2.0 ms,頻帶為90~110 kHz,采樣率為500 kHz。靜目標位于,動目標位于,正對接收陣運動的徑向速度為,對應中心頻率的頻偏為133 Hz,基元域信噪比, 2維成像以及CFAR檢測后的多普勒頻偏估計結果如圖5所示。
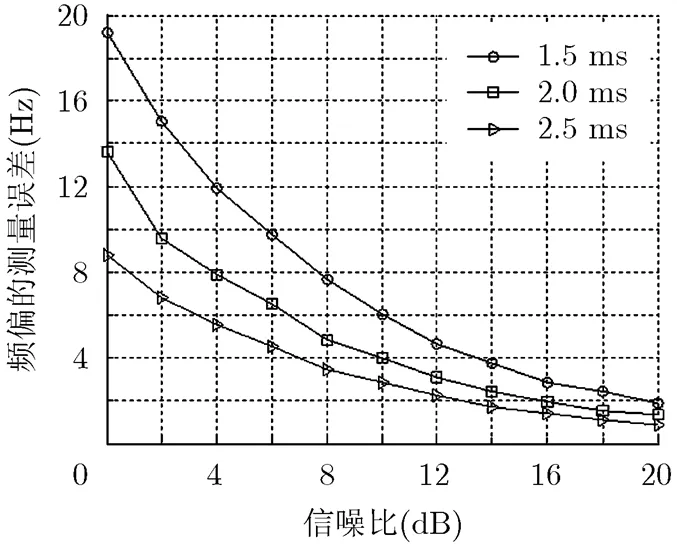
圖5 測頻精度隨信噪比的變化曲線
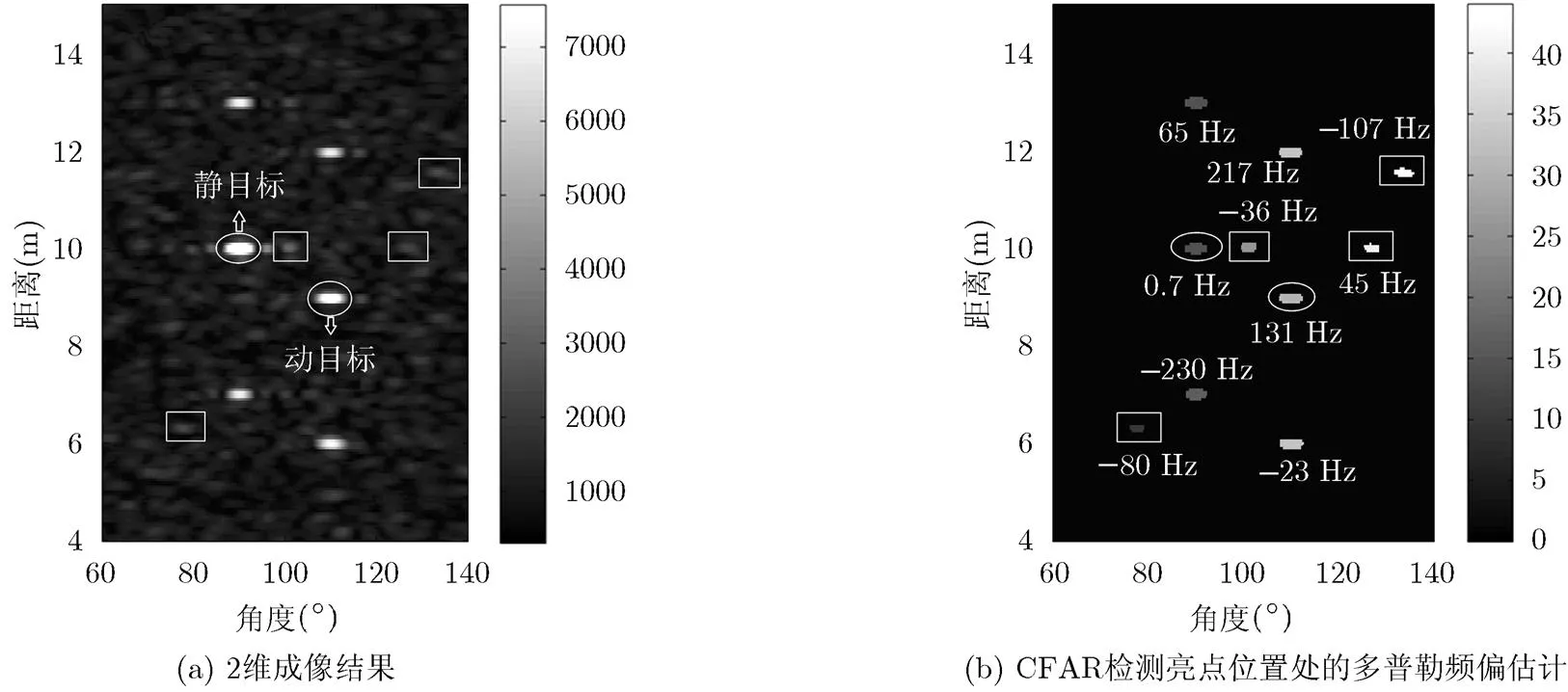
圖6 基于多普勒頻偏的動目標檢測結果
2.3 寬帶信號的小數時延FIR波束形成
由2.2節可知,多普勒頻偏估計需要獲取CFAR檢測亮點位置處的目標回波,其中最經典方法的便是常規時域波束形成,通過對接收陣各陣元信號進行數字時延,相加后得到波束輸出。目標回波獲取的精度決定了多普勒頻偏估計的精度,但時域波束形成只能對整數倍采樣點進行移位,在低倍采樣的情況下,波束形成的輸出信號將產生較大誤差。而頻域波束形成是對各子窄帶進行頻域波束形成后再通過傅里葉反變換轉化為時域輸出,這種方式得到的時域信號并不是真正連續的,且時頻轉換帶來能量損失[12]。本節通過2階錐規劃[13],僅利用9階的FIR濾波器實現寬帶信號的小數時延,小數時延的精度為,只犧牲較小的運算量,即可提高時域波束形成器的精度。
假設FIR濾波器階數為,其中為奇數,期望的小數時延為。由于FIR濾波器具有個采樣點的群時延,則濾波器設計所期望的頻率響應為
下面對寬帶信號的小數時延FIR濾波器進行仿真,仿真條件為:FIR濾波器的階數=9,設計頻帶為70~130 kHz,采樣頻率為500 kHz,小數時延的精度為。FIR濾波器頻率響應的設計誤差分布和濾波器的時延分布如圖7和圖8所示。可以看出,FIR濾波器設計頻率響應與期望頻率響應誤差在整個設計頻帶中均達到-100 dB以下,僅用9階FIR濾波器便可以實現精度的小數時延。

圖7 頻率響應的誤差分布

圖8 FIR濾波器的時延分布
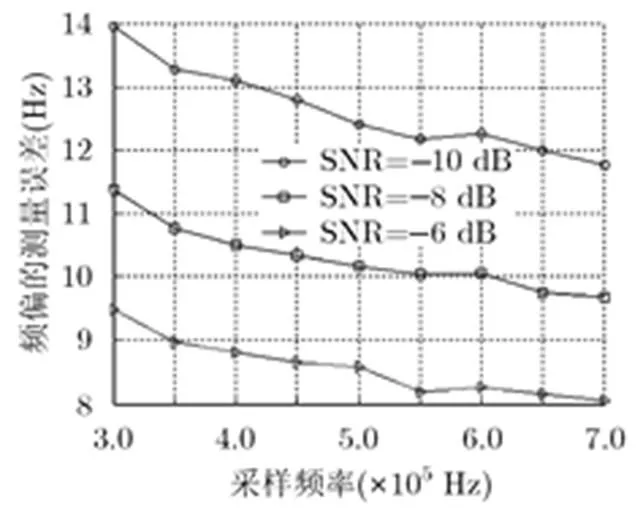
圖9 多普勒頻偏估計精度隨采樣頻率的變化曲線

圖10 多普勒頻偏估計誤差隨基元級信噪比的變化曲線
3 水池試驗
水池試驗采用收發同置的聲吶對運動目標進行探測,聲源發射LFM脈沖對信號,單個脈沖長度為2 ms,頻帶為90~110 kHz,發射信號的觸發周期為0.25 s。接收為陣元間距為1 cm的16元圓弧陣,采樣頻率。拉動水杯靠近接收陣做徑向運動,利用基于多普勒頻偏估計的單幀圖像低速運動目標檢測算法對運動水杯進行單幀檢測。水池試驗配置如圖11所示。
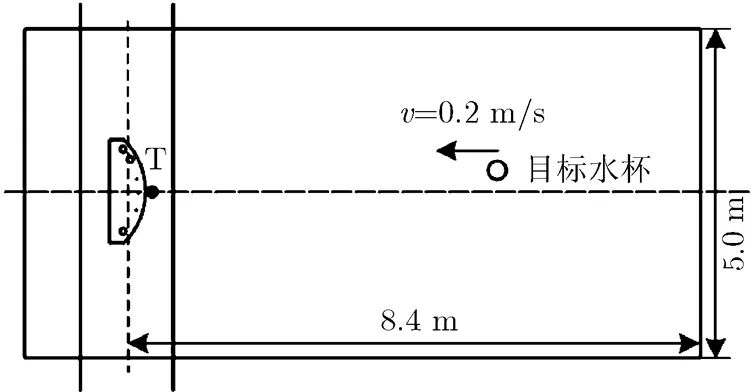
圖11 水池試驗配置圖
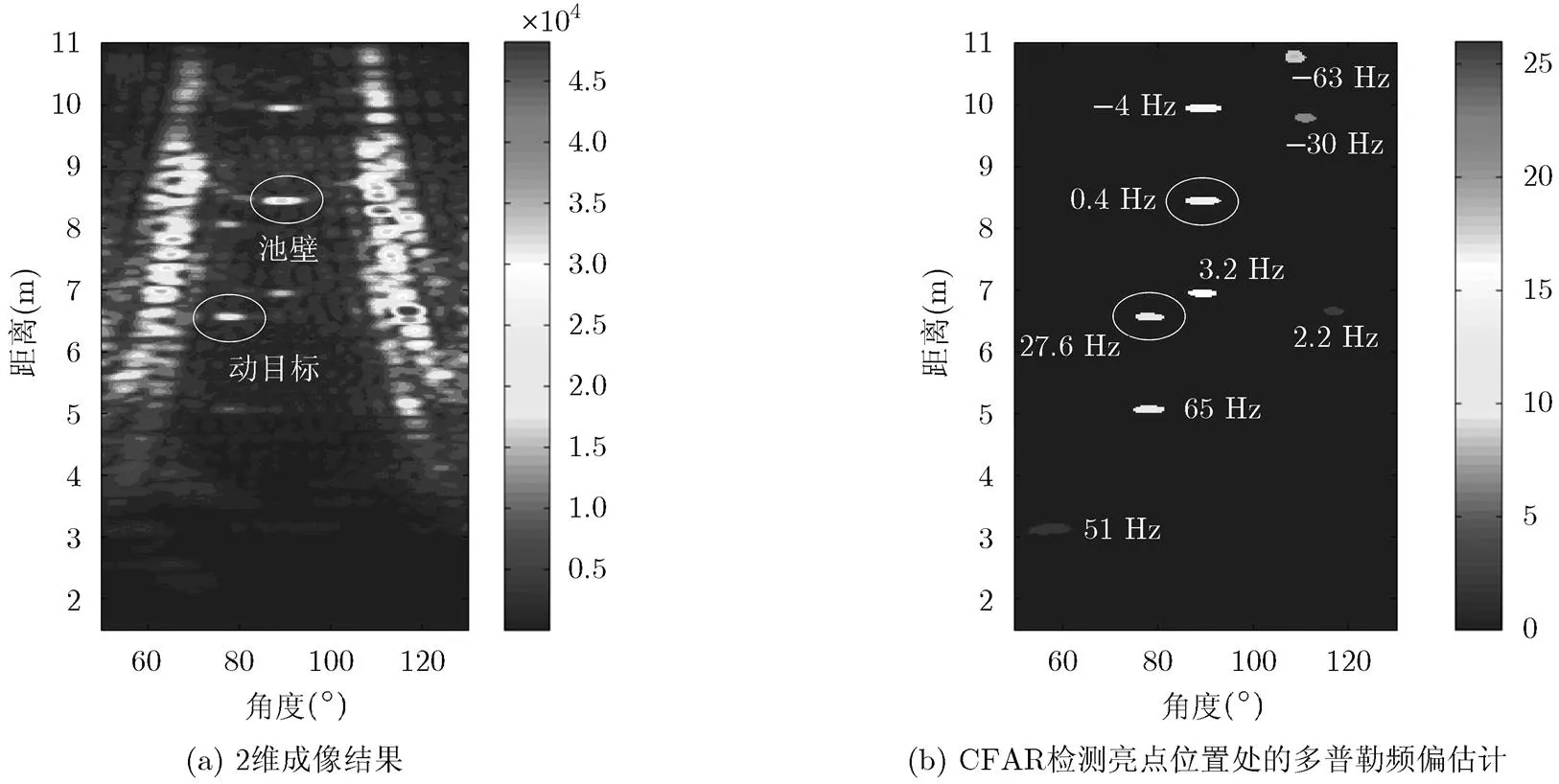
圖12 第14幀處理結果
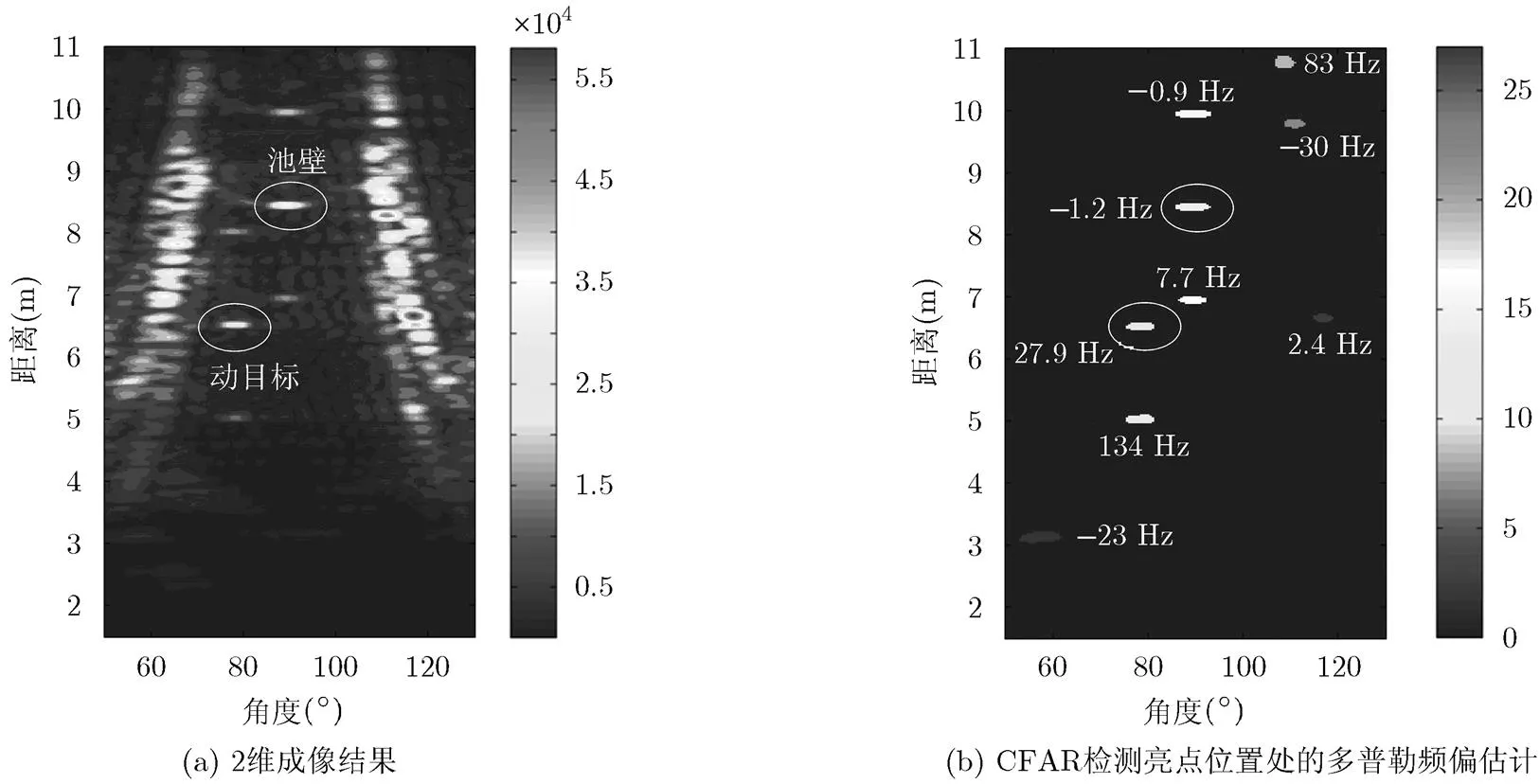
圖13 第15幀處理結果
4 結論
本文提出了一種基于多普勒頻偏估計的單幀圖像低速運動目標檢測算法,通過發射多普勒不敏感的LFM脈沖對,忽略多普勒效應對成像結果的影響,但在圖像域檢測的同時,利用寬帶時域波束形成和復相關頻率測量法,對檢測亮點處的波束輸出信號進行多普勒測頻。利用目標回波的多普勒頻偏信息對靜目標和雜波亮點進行剔除,減小運動目標檢測的虛警率,實現了單幀圖像的運動目標檢測,為后續的檢測跟蹤帶來了便利。由于寬帶波束形成的性能直接影響多普勒頻偏的估計精度,為了改善低倍采樣下寬帶時域波束形成的性能,本文利用2階錐規劃設計濾波器的系數,用9階FIR濾波器實現了0.01倍采樣點的小數時延,提高了多普勒頻偏的估計精度。通過計算機仿真和水池試驗驗證了該算法的有效性。
[1] 張偉豪, 許楓. 水下蛙人被動探測技術實驗研究[J]. 聲學學報, 2012, 37(3): 301-307. doi: 10.15949/j.cnki.0371-0025.2012.03. 006.
ZHANG Weihao and XU Feng. Experiment and study for passive acoustic detection of underwater divers[J]., 2012, 37(3): 301-307. doi: 10.15949/j.cnki.0371- 0025.2012.03.006.
[2] BREKKE E, HALLINGSTAD O, and GLATTETRE J. Tracking small targets in heavy-tailed clutter using amplitude information[J]., 2010, 35(2): 314-392.
[3] 高文, 湯洋, 朱明. 復雜背景下目標檢測的級聯分類器算法研究[J]. 物理學報, 2014, 63(9): 94204-94207. doi: 10.7498/aps. 63.094204.
GAO Wen, TANG Yang, and ZHU Ming. Study on the cascade classifier in target detection under complex background[J]., 2014, 63(9): 94204-94207. doi: 10.7498/aps.63.094204.
[4] 易偉. 基于檢測前跟蹤技術的多目標跟蹤算法研究[D]. [博士論文], 電子科技大學, 2012.
YI Wei. Research on Track-before-detect algorithms for multiple-target detection and tracking[D]. [Ph. D. disser- tation], University of Electronic Science and Technology of China, 2012.
[5] YANG T C, SCHINDALL J, and HUANG C F. Clutter reduction using Doppler sonar in a harbor environment[J]., 2012, 132(5): 3053-3067.
[6] 黃聰, 孫大軍, 張殿倫. 強相干干擾下基于二階錐規劃的圓弧陣寬帶二維成像[J]. 電子與信息學報, 2014, 36(11): 2634-2639. doi: 10.3724/SP.J.1146.2013.01796.
HUANG Cong, SUN Dajun, and ZHANG Dianlun. Wideband two-dimensional imaging with arc array based on second-order cone programming under strong coherent interference[J].&, 2014, 36(11): 2634-2639. doi: 10.3724/SP.J.1146. 2013.01796.
[7] 黃聰, 孫大軍, 張殿倫. 雙基地多輸入多輸出虛擬陣列的穩健低旁瓣波束優化技術[J]. 物理學報, 2014, 63(18): 188401-188406. doi: 10.7498/aps.63.188401.
HUANG Cong, SUN Dajun, and ZHANG Dianlun. Optimizations for robust low sidelobe beamforming of bistatic MIMO virtual array[J]., 2014, 63(18): 188401-188406. doi:10.7498/aps.63.188401.
[8] 陳建軍, 黃孟俊, 趙宏鐘. 相參雷達時頻域CFAR檢測門限獲取方法研究[J]. 電子學報, 2013, 41(8): 1634-1639. doi: 10.3969/j.issn.0372-2112.2013.08.029.
CHEN Jianjun, HUANG Mengjun, and ZHAO Hongzhong. Research on estimated threshold of CFAR detection in time frequency domain for coherent radar[J]., 2013, 41(8): 1634-1639. doi: 10.3969/j.issn. 0372-2112. 2013.08.029.
[9] 李想. 水下高速運動目標軌跡測量技術研究[D]. [博士論文], 哈爾濱工程大學, 2011.
LI Xiang. Research on the techniques of underwater high-speed moving target’s trace measuring[D]. [Ph.D. dissertation], Harbin Engineering University, 2011.
[10] 馬海濤, 彭東立, 王華亮. 寬帶多普勒技術中模糊速度處理方法改進[J]. 聲學學報, 2011, 36(2): 226-230. doi: 10.15949/ j.cnki.0371-025.2011.02.004.
MA Haitao, PENG Dongli, and WANG Hualiang. An improvememt method to the ambiguous velocity in broad-band Doppler technique[J]., 2011, 36(2): 226-230. doi: 10.15949/j.cnki.0371-025.2011.02.004.
[11] 時潔, 楊德森, 時勝國. 基于矢量陣的運動聲源柱面聚焦定位方法試驗研究[J]. 物理學報, 2012, 61(12): 124302-124307.
SHI Jie, YANG Desen, and SHI Shengguo. Experimental research on cylindrical focused beamforming localization method of moving sound sources based on vector sensor array[J]., 2012, 61(12): 124302-124307.
[12] 梁國龍, 馬巍, 范展. 矢量聲納高速運動目標穩健高分辨方位估計[J]. 物理學報, 2013, 62(14): 144302-144307. doi: 10.7498 /aps.62.144302.
LIANG Guolong, MA Wei, and FAN Zhan. A high resolution robust localization approach of high speed target based on vector sonar[J]., 2013, 62(14): 144302-144307. doi: 10.7498/aps.62.144302.
[13] 楊濤, 蘇濤, 何學輝. 基于波束域導向矢量估計的穩健自適應波束形成方法[J]. 電子與信息學報, 2013, 35(11): 2759-2763. doi: 10.3724/SP.J.1146.2012.01334.
YANG Tao, SU Tao, and HE Xuehui. Robust adaptive beamforming based on beamspace steering vector estimation[J].&, 2013, 35(11): 2759-2763. doi: 10.3724/SP.J.1146. 2012.01334.
[14] 鄢社鋒, 馬遠良. 基于二階錐規劃的任意傳感器陣列時域恒定束寬波束形成[J]. 聲學學報, 2005, 30(4): 309-315. doi: 10.15949/j.cnki.0371-025.2005.04.006.
YAN Shefeng and MA Yuanliang. Broadband constant beamwidth beamforming for arbitrary sensor arrays in time domain via second-order cone programming[J]., 2005, 30(4): 309-315. doi: 10.15949/j.cnki.0371-025.2005.04. 006.
Low-speed Moving Target Detection of Single Frame Image Based on Doppler Shift Estimation
HUANG Cong LIU Yin
(,430064,)
The regular algorithms of target detection and tracking in image domain are very sensitive to the false alarm rate, and the real time performance of target detection and tracking is limited with high false alarm rate. In order to reduce the false alarm rate of original target detection and improve the real time performance, an algorithm of low-speed moving target detection of single frame image based on Doppler shift estimation is proposed. Through transmitting LFM plus pair signal which is non-sensitive to the Doppler shift, the influence on image by Doppler shift can be ignored. But during the detection in image domain, the Doppler shift of target echo is used to remove static targets and clutter highlights. The false alarm rate of moving target detection is reduced based on single frame data, the moving target detection is achieved through a single frame image to make a good foundation for target tracking later. First, the CFAR determination in image domain is carried out in the algorithm. Then, the Doppler shift of the beamforming signal at the highlights detected is estimated through time-domain broadband beamforming and complex correlation frequency measurement. The static targets and clutter highlights are removed effectively through single frame image. In order to improve the performance of time-domain broadband beamforming, the filter coefficients are designed by second order cone programming. The 0.01 times sampling point of the fractional delay is achieved by a 9-order FIR filter and the estimation accuracy of the Doppler shift is improved. The validity of the proposed method is verified by the computer simulation and pool experiment.
Two-dimensional imaging; Moving target detection; Doppler shift estimation; Fractional delay
TP391
A
1009-5896(2016)07-1638-07
10.11999/JEIT151078
2015-09-21;改回日期:2016-01-29;網絡出版:2016-03-30
黃聰 huangcong32@163.com
國家重點實驗室基金(9140C200406110C2001),國防基礎科研計劃(B2420132004),國家863計劃項目 (2012AA 090901-4)
The National Key Laboratory Foundation (9140C200406110C2001), The National Defense Basic Scientific Research Program of China (B2420132004), The National 863 Program of China (2012AA090901-4)
黃 聰: 男,1988年生,博士,研究方向為水下陣列信號處理.
劉 寅: 男,1987年生,博士,研究方向為水聲信號處理.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
