電液靜力加載試驗系統安全保護策略研究
2016-10-14 12:48:32竇雪川郝巖研楊志鵬
導彈與航天運載技術 2016年2期
關鍵詞:系統
竇雪川,郝巖研,楊志鵬,李 紅
?
電液靜力加載試驗系統安全保護策略研究
竇雪川,郝巖研,楊志鵬,李 紅
(北京強度環境研究所,北京,100076)
安全保護策略在靜力加載試驗中對試件起到重要的安全保護作用。以實際電液靜力加載試驗系統為例,對試驗要求分析研究,設計一種全面的安全保護策略,通過試驗驗證其在系統工作異常時,有效的保證了試驗安全。
靜力加載;安全保護;控制系統;保護模塊
0 引 言
電液靜力加載試驗系統通常工作在高壓力、高輸出載荷的狀態,其穩定性和安全性十分重要,一旦出現工作異常,往往會造成系統失控、執行機構動作失誤、輸出載荷超過額定工作范圍等情況,嚴重時會損壞加載對象,造成試驗失敗,對操作人員和系統造成安全事故。因此,全面可靠的安全保護措施對于電液靜力加載試驗系統來說是必要的,系統應當對異常情況進行判斷,并具有自動保護功能[1, 2]。目前市場上使用范圍較廣的伺服控制器一般都是針對疲勞等試驗工況設計,其保護策略不能完全滿足靜力加載試驗的使用需求。
本文以實際應用中某多通道電液靜力加載試驗系統為例,分析靜力試驗中可能出現的異常情況和安全隱患,設計全面的安全保護策略,供試驗使用,以保證靜力加載試驗的安全。
1 安全保護策略原理
電液靜力加載試驗系統用于給各種試驗件施加載荷,確定試件結構在一定載荷作用下的應力分布、承載能力和穩定性,從而合理評價結構的完整性和耐用性,使產品能夠很好地滿足預期的設計要求,降低產品研制周期和開發費用[3~5]。
本文所用多通道電液靜力加載試驗系統采用液壓伺服控制方式,系統構成如圖1所示。
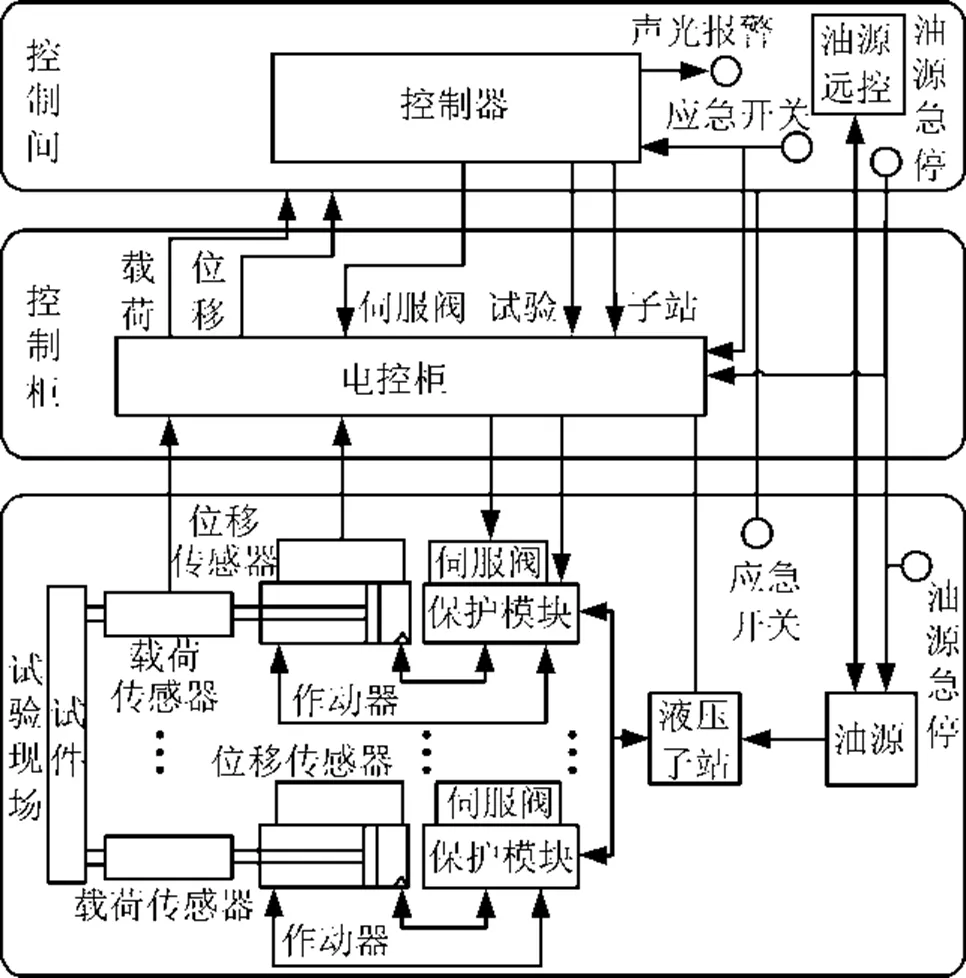
圖1 靜力加載試驗系統構成示意
在靜力試驗過程中,試件上不同加載點設置的加載譜一般各不相同,難以準確預見破壞發生的通道、破壞時臨界點。
載荷誤差是衡量系統加載精度的重要指標,當試件發生破壞或結構進入屈服階段,某些通道的載荷反饋將出現突變,使載荷誤差突然變大。因此,對于大部分試驗,都可以使用載荷誤差作為破壞信號。在某些試驗中,也使用絕對位置信號作為破壞判斷信號,即作動器位置超過某值時,認定為破壞。
出現加載誤差超限時,為保證試件和在場試驗人員的安全,不同加載點對系統的保護需求也不盡相同,如保持當前位置、保持當前加載載荷或者立即卸載等。此外,異常情況出現往往較為突然,難以手動干預,需要系統具有自動判斷并及時處理異常情況的能力。
根據靜力加載試驗的特點,系統設計了相應的安全保護策略,根據多種試驗需求單獨設定各加載通道的安全保護機制。系統在危險情況下,自動開啟保護模式,各通道按預定機制進行保護。
另外,系統某些分系統和元器件的異常工作狀態不容易及時發現,但會對系統整體造成損壞,影響試驗進程和系統使用壽命,這部分也需要實時監控。
系統安全保護策略涉及系統的各個部分,主要與控制系統和油源密切相關。各部分保護策略配合使用,才可能使系統得到全面完善的保護。
2 伺服控制系統安全保護策略
電液靜力加載試驗系統中,整體安全保護策略由控制系統實現。控制系統具有多項安全功能。
2.1 實時監測
控制系統具有全面的實時監測功能,可以及時發現系統的異常工況,以便在最短時間內采取有效措施。具體功能如下:
a)在試驗開始前可以自動檢測系統的各類硬件是否工作正常。
b)實時監測系統各項參數和狀態。監測目標包括反饋超限、反饋誤差超限、載荷對比超限、系統掉電、系統故障等。其中,載荷傳感器采用雙橋路輸出,防止單橋路采集信號異常。系統掉電和系統故障包括油源急停和故障信號,油源出現異常時,控制系統可接收故障信號并及時報警。
c)系統安全監測采用實時多級誤差(如3級誤差:小超差、正常超差、嚴重超差)判斷,每級誤差大小都能設定,各級誤差能執行不同的誤差處理動作,如卸載、保載、回零等。
2.2 安全保護觸發
控制系統一旦實時監測到加載超差,可觸發相應的安全保護。安全保護主要包括兩種形式:一種是控制模式轉換,一種是保護模塊觸發。這兩種保護主要針對極限情況,每次試驗可根據不同試驗工況在兩者之間選擇一種設置執行。
2.2.1 控制模式轉換
對結構件進行多點協調加載的靜力試驗時,一旦載荷突變,觸發載荷誤差超限,系統應立刻采取有效的安全保護策略,以免試驗件由于載荷失衡或在無承載能力的情況下繼續承受對其施加的載荷,導致結構件全局的破壞。此時,控制系統從載荷控制狀態立刻切換到位置控制狀態,保證伺服作動器處于當前位置,以最大限度防止試驗件進一步破壞,方便試驗人員判斷試驗件的第一破壞點以及破壞狀況,便于準確分析試驗件結構的薄弱之處。
正常工作狀態下,控制系統根據工況對實際反饋信號和指令之間的加載誤差進行設置,一般設置在2%~5%之間。在載荷控制狀態下,控制系統同時對載荷和位移信號進行采集,載荷信號作為控制量,位移信號不參與控制。一旦實際反饋信號和指令之間的誤差超過設定限值,自動觸發安全保護,此時,系統立刻停止執行加載譜,在一個控制周期內(控制周期為0.004 s)將載荷控制切換為位移控制,以當前載荷控制狀態下的作動器位移采集信號作為位移控制指令,將伺服作動器維持在力控和位控轉換時刻的位置。解決異常工況后,試驗人員可根據試驗需要,安全地解除保護,然后選擇繼續加載、逐級同步卸載或直接卸載,經實際測試,解除保護時的沖擊不大于1%,可滿足試驗需求。
2.2.2 保護模塊觸發
本系統伺服作動器配置有保護模塊,具有油液過濾、卸載、斷電保護、過載保護等多種功能。保護模塊可與伺服作動器集成為一體,也可分體安裝。緊急情況發生時,保護模塊保護功能被觸發,控制系統控制保護模塊執行相應保護措施[6]。模塊原理見圖2。
保護模塊上設置了伺服閥和兩組換向閥:一組用于實現保載功能,一組用于實現卸載功能。系統正常工作時,保護模塊處于非保護模式,此時伺服閥可正常控制伺服液壓缸精確執行規定動作。一旦加載出現異常,觸發保護策略,使保護模塊進入保護模式。保護模式有兩種:一種為保載模式,一種為卸載模式,對應保護模塊上的兩組換向閥,操作人員可根據系統使用工況選擇設置保護模式。不同通道可設置不同的保護模式。
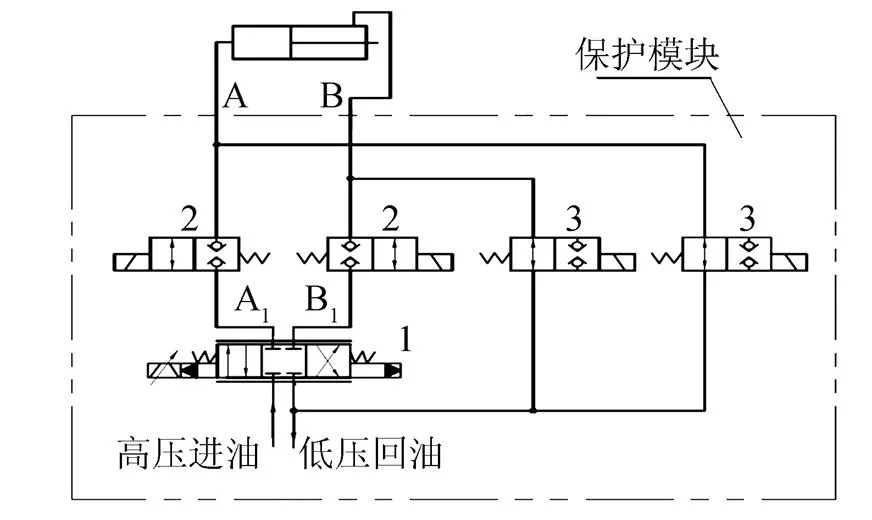
圖2 保護模塊原理
1—伺服閥;2—常閉電磁閥;3—常開電磁閥;
A、B—液壓缸兩腔;A1、B1—伺服閥油口
將保護模塊設置為保載模式時,保載閥將伺服液壓缸內的油液鎖死在兩腔之內,保持當前的加載狀態,模塊實現保載功能;將保護模塊裝置設置為卸載模式時,伺服液壓缸兩腔和伺服閥輸出同時與回油溝通,油液瞬間泄回回油管路,模塊實現卸載功能。
控制系統和保護模塊供電線路上設置了UPS,系統整體掉電時,不影響保護模塊保護功能的實現。保護模塊保載、卸載功能實現簡單方便,穩定性高。
2.3 急 停
系統具備2個應急開關,控制間和現場各1個,2個應急開關串聯使用。急停開關可將控制信號分別發給控制器和電控柜中的可編程邏輯控制器(Program Logic Control,PLC),這樣可在控制器失控的狀態下,直接控制PLC執行保護動作。按下任意一個應急開關后,立即觸發保護模塊,使保護模塊執行試驗前設置的安全保護策略。應急開關具備聲光報警功能。一般異常工況不需使用急停開關,但在伺服閥失控等自動保護功能無效的情況下,急停開關可有效防止系統進一步失控。
3 油源安全保護策略
油源系統在工作過程中一旦出現超溫、超壓或液位超限等情況,可能為泵組或元器件損壞造成油源故障,會對系統造成嚴重影響,因而需要具有全面的安全保護措施[7, 8]。本油源系統提供了本地/遠程控制及同時報警提示,方便操作者實時掌握油源系統的工作狀態,并在緊急情況下及時采取有效的安全保護措施。
油源本地控制柜操作界面采用手動按鈕方式,設置有本地/遠程控制切換旋鈕,可以方便地在本地和遠程之間操作和切換。操作面板上設置油源狀態顯示,包括油溫、壓力、液位、泵啟停狀態、卸荷狀態、濾油器超限等。
遠程控制操作界面對油源液位、液溫、油壓、過濾器狀態、泵吸油口蝶閥開啟狀態、泵的工作時間進行監控,可實現遠程調壓、卸荷和液位液溫及油壓等報警參數設置。
油源系統的液位、液溫、油壓報警根據異常情況的緊急程度,分為3檔,分別為正常工作狀態、接近極限狀態和極限狀態,油源系統接近極限狀態時,本地和遠程兩處同時報警提示;達到極限工作狀態時,泵組自動停機,以保障油源和整體系統的安全。
當高壓過濾器或回油過濾器等堵塞時,過濾器報警指示燈變為紅色,提示操作者及時更換濾芯。
泵的吸油口蝶閥如果處于關閉狀態,也可以在遠程操作界面顯示為紅色報警,此時與之對應的泵無法開啟,有效防止誤操作引起的吸空損壞等。
本地和遠程操作界面均設置有手動急停按鈕,方便操作者在緊急情況下及時停機卸荷。
油源在出現異常掉電、通訊中斷或上述其他故障需要停機時,除油源本地或遠程控制報警外,還將報警信號發送至控制系統,使其開啟保護模式,并同時報警,通知試驗操作人員及時采取有效措施,保障系統和試驗安全。
4 保護效果
在實際系統中,采用模擬試件模擬真實試驗過程可能遇到的異常工況,以驗證各個環節安全保護策略的有效性。
4.1 控制系統保護效果驗證
4.1.1 控制模式轉換效果
用鑄鐵棒作為模擬試件,設置系統自動觸發安全保護策略,模擬真實的靜力加載破壞試驗,檢驗控制模式轉換保護策略是否滿足試驗要求。
設置系統實際加載載荷和指令載荷超差限值為5%時自動觸發安全保護策略。試件在試驗前及觸發保護后的狀態如圖3所示。由圖3可以看出,試件已經屈服,處于將壞而未壞的中間狀態,試件被拉長,但未斷裂,在觸發保護后未被進一步破壞。
圖4為系統觸發保護瞬間,載荷控制轉為位置控制的曲線。系統觸發保護前,載荷指令不斷增加,位移指令為零,此時載荷指令為主控制指令,位移指令不起作用,載荷反饋跟隨載荷指令上升。當兩者的誤差超過設定值時,觸發保護,控制模式由載荷控制轉換為位移控制,此時載荷指令失效,突降為0,同時位移指令生效,從0突變為當前位移反饋值,作動器動作跟隨位移指令保持位置不變,伺服閥基本無開口。

a)試驗前
b)觸發保護后
圖3 試件在試驗前后狀態
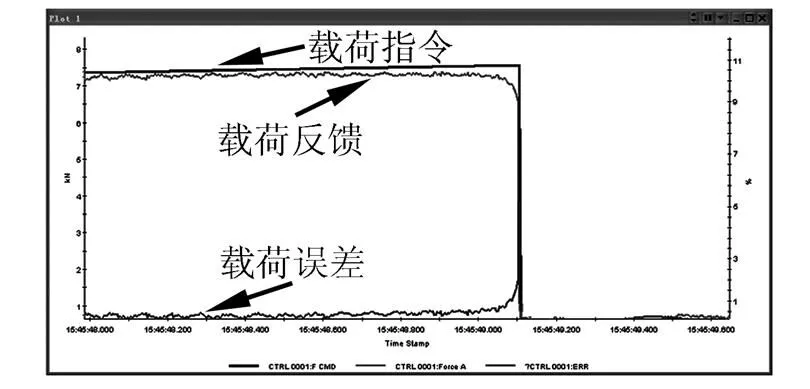
a)載荷控制超差觸發保護
b)載荷控制轉位置控制局部放大
圖4 載荷控制轉位置控制曲線
控制模式轉換保護策略設置方便,使用靈活,但對控制系統依賴性較強,一旦控制系統出現故障,系統將會比較危險。
4.1.2 保護模塊保護效果
經大量試驗證明,保護模塊啟動保載功能后,可以保證伺服作動器在1 min內壓力下降不超過工作壓力的5%,5 min內壓力下降不超過工作壓力的10%,使操作人員在工作異常狀態下有足夠的時間檢查試驗狀態,進一步采取有效措施;啟動卸載功能后,可以保證伺服作動器內壓力在200 ms內卸到0,及時卸掉試驗件上所加載荷,防止試驗件被進一步破壞,有效保障試驗安全。
保護模塊保護策略應用方便,可靠性高。但由于液壓元件的特性,作動器和保護模塊閥塊內部存在微量內泄,保載狀態下保載壓力會緩慢變化,這對加載要求較高的試驗來說需要慎重考慮。
4.2 油源保護效果驗證
通過操作油源實現超溫、超壓、液位超限、掉電等異常工作狀態,模擬油源在工作狀態異常時的報警和保護策略。試驗證明,油源在超溫、超壓、液位超限等狀態下,可以及時自動停車,同時向控制系統發出聲光報警信號。油源系統掉電或通訊中斷時同樣可以向控制系統發出報警,提醒試驗操作人員及時采取有效措施,保證試驗安全。
5 結 論
通過以上模擬試驗,驗證了電液靜力加載試驗系統安全保護策略對試件的保護效果是及時有效的。
試驗結果證明,采取安全保護策略以后,試驗加載過程中出現異常狀態時,系統能夠及時停止加載,有效防止試件或者系統的損壞,同時,提供聲光報警,提醒現場試驗人員。該安全保護策略為試驗操作人員提供了充足的時間研究分析異常狀態,便于進一步采取適當措施。
總體來說,異常狀態是難以完全避免的,試件有設計缺陷或加工缺陷時,試驗可能出現加載異常的情況。另外,系統在使用過程中,也可能出現異常狀態。因此在故障發生時,系統及時發出報警信號,自動或者手動采取有效保護措施,保障試驗安全,是系統安全加載的重點。
[1] 黃獻龍, 李尚義, 黃澤煥, 等. 靜力試驗用電液伺服加載系統的分析和實驗——如何實現系統保護[J]. 導彈與航天運載技術, 2000(3): 30-33.
[2] 王茂, 黃麗蓮. 運載火箭構件抗壓強度測試的壓力自動加載[J]. 哈爾濱工業大學學報, 2002(12): 838-842.
[3] 黃獻龍, 李晨光, 趙克定. 多點電液伺服靜力加載系統設計[J]. 試驗技術與試驗機, 1998(3): 11-13.
[4] 汪禮鵬. 用于結構靜力試驗的電液伺服加載系統的開發與研究[D]. 南京: 南京理工大學, 2013.
[5] 郭呈賀, 錢文翰, 陸元章. 二十四通道電液力控系統[J]. 液壓氣動與密封, 1996(1): 18-20.
[6] 姚漢紅. 電液伺服控制系統的故障保護模塊[J]. 液壓與氣動, 2002(1): 33-35.
[7] 張建慈, 張瑛. 液壓系統中的安全保護措施——超壓保護[J]. 機床與液壓, 2002(1): 129-130.
[8] 彭熙偉, 宋永吉, 李占宏, 等.高壓大流量液壓泵站的設計[J]. 液壓與氣動, 2003(2): 9-11.
Research on the Protecting Tactic for the Electrohydraulic Static Testing Loading System
Dou Xue-chuan, Hao Yan-yan, Yang Zhi-peng, Li Hong
(Beijing Institute of Structure and Environment Engineering, Beijing, 100076)
The protecting tactic is very important for the test specimen in the electrohydraulic static loading test. In this paper an example is given to analyze and research on the testing request. The all-around protecting tactic is design. And its validity is proved.
Static loading; Protecting; Control system; Protecting module
1004-7182(2016)02-0047-04
10.7654/j.issn.1004-7182.20160210
TH137
A
2015-05-15
竇雪川(1983-),女,工程師,主要從事液壓系統設計及集成
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
