基于人工智能和軟計算的船舶自動避碰決策算法
2016-10-12 03:44:21呂紅光尹建川
中國航海 2016年3期
呂紅光, 尹 勇, 尹建川, 胥 文
(大連海事大學 航海學院, 遼寧 大連 116026)
基于人工智能和軟計算的船舶自動避碰決策算法
呂紅光, 尹 勇, 尹建川, 胥 文
(大連海事大學 航海學院, 遼寧 大連 116026)
為減少或避免人為失誤導致的船舶碰撞事故,保證船舶安全航行,對自動避碰系統進行深入研究,其中船舶自動避碰決策算法是一個重要問題。對此,綜述專家系統、模糊邏輯、神經網絡、進化計算、群智能及免疫算法等人工智能和軟計算方法在該領域中的應用,并對相關研究成果進行分類整理和不足分析,指出人工智能和軟計算方法應用于船舶智能避碰決策算法中的研究方向。
船舶; 人工智能; 軟計算; 智能避碰; 決策算法
Abstract: The automatic collision avoidance technology is attracting a lot of interest for its potential for preventing human-error-caused collision accidents. The application of artificial intelligence and soft computation in avoidance decision making algorithms, the core of the automatic collision avoidance technology, covering the expert system, the fuzzy logic, the artificial neural network, the evolutionary computation, the immune algorithms, and the swarm intelligence algorithm, etc are reviewed. The related publications are categorized and their shortcomings are pointed out to direct further researches on artificial intelligence in automatic collision avoidance algorithms.
Keywords: ship; artificial intelligence; soft computation; automatic collision avoidance; decision making algorithm
近年來,隨著海上交通環境日益擁擠、人為失誤導致的海難事故頻發、人力資源成本逐漸攀高、航海技術及儀器快速發展,對無人駕駛船舶的研究逐漸深入。無人駕駛船舶的核心是智能化的綜合船橋,而自動避碰決策系統則是綜合船橋的關鍵組成部分。一個成熟的自動避碰決策系統需滿足(不限于)以下條件:避開危險,包括動態和靜態的障礙物;在適當交通壓力下完成多船會遇時的自動避碰;避碰后選擇安全且經濟的航線(復航);遵守《海上避碰規則》(以下簡稱《規則》);建立較精確的船舶運動數學模型;考慮天氣、海況等外部條件;具有良好的實時性。
以上各個條件之間是相互影響的,滿足這些條件的自動避碰決策系統是一個極其復雜的綜合系統。多年來,相關專家一直致力于尋找更加智能、優化的算法。人工智能(Artificial Intelligence, AI)和軟計算(Soft Computation, SC)方法的出現為智能避碰決策系統提供了新的解決方案,相比傳統的數理模型方法,其在解決船舶運動環境的復雜性、過程的非線性、避碰決策的實時性和傳感器信息的容錯性等方面具有較好的表現。[1]
1 人工智能和軟計算方法概述
AI是綜合計算機科學、控制論、信息論、神經生理學、心理學、語言學和哲學等多種學科的相關理論而發展起來的一門交叉學科。傳統的AI以語言或符號規則的形式表達和模擬人類的智能行為。對于某些特定領域內的決策問題,若存在明顯的知識,則“物理符號系統”假設具有重要意義。但是,基于“物理符號系統”假設的人工智能是以靜止、精確的邏輯方式處理問題的,在面向不同的決策問題時缺乏適應性,這顯然與人類智能依靠人腦思維靈活處理問題的方式不同。SC的出現彌補了傳統AI的不足,其通過模擬自然界中智能系統的生化過程來解決復雜問題,通過對不確定、不精確及不完全真值進行容錯來取得低代價的解決方案和魯棒性。
為反映應用研究的脈絡,這里僅對一些應用于船舶智能避碰決策算法中的核心內容進行論述。
2 基于知識的系統
基于知識(Knowledge Based,KB)的系統是應用人類的知識來解決問題(通常是困難問題)的計算機軟件系統,當其表現出專家級求解問題的能力時,稱為專家系統(Expert System,ES)。
2.1專家系統
自20世紀80年代ES應用于自動避碰領域以來,研究重點是避碰知識庫和推理機制。知識庫知識一般源于《規則》、專家對《規則》的解釋、良好船藝及避碰實踐經驗等[2],常用的知識表達方式有產生式規則、框架、過程、邏輯、決策樹、語義網絡、神經網絡及類與對象的表示等[3],其中產生式規則應用較多,組織方式多為模塊化或樹狀結構[4];推理機制需確定碰撞危險度,采取避讓行動的時機、方法和幅度及復航方案等[5],采用的推理方式包括正向鏈和反向鏈推理、非單調推理、類比推理及不確定性推理等[4]。當推理機進行規則匹配時,可能會出現多個規則匹配成功的情況,還會用到沖突消解策略,可采用優先級法、可信度法、代價法及自然順序法等。[3]文獻[6]用A*動作空間搜索算法簡化ES的設計;文獻[4]和文獻[7]則結合船載自動識別系統(Automatic Identification System, AIS)、電子海圖顯示與信息系統(Electronic Chart Display and Information System, ECDIS)及船舶管理系統(VMES)進行自動避碰ES的設計與仿真。處理的問題多為寬闊水域單船自動避碰問題,少數提出多船會遇的自動避碰決策生成與優化的觀點及方法。[8-9]
自動避碰專家系統的缺點為:知識獲取困難且耗時多,難以形成完備、準確和簡練的知識庫[10];系統實時性較差;不具備智能學習的能力,維護困難,不能處理知識庫以外的問題等。
2.2基于案例的推理方法
基于案例的推理(Case-Based Reasoning,CBR)是一種增量式的基于知識的問題求解和學習方法,規避了傳統基于規則的人工智能推理系統在知識和規則獲取上的瓶頸問題。[11]其原理是根據當前問題描述對案例庫進行檢索,獲得與當前問題相似的案例集,修改或直接復用相似案例的解,從而獲得解決當前問題的解。沈麗珺[12]采取人工提取海事案例的方式設計一個基于CBR方法的船舶避碰決策支持模型,但案例數量有限,處理多船會遇的避碰過程評估有待完善。LIU等[13]提出一種基于歷史海事記錄和中文信息處理的避碰案例自動生成方法,對CBR避碰決策系統建立較完備、準確的案例庫具有一定作用。周世波等[14]根據避碰案例結構和CBR的特點研究避碰知識庫系統的知識獲取、表示、檢索和冗余檢查等問題,提出建立避碰知識庫思路并開發避碰知識庫管理原型系統。黃穎等[15]以產生式規則描述案例,建立基于會遇態勢特征的算法案例庫,采用特征完全匹配檢索方法尋找源案例中緊迫危險操船決策的模型,最終自動求解生成緊迫危險操船決策方案。CBR方法為自動避碰決策算法提供了新的途徑,具有簡化知識獲取、便于知識積累和自主學習、系統構建及推理相對容易等優點[16],但目前在多船自動避碰方面仍需作進一步研究。
3 模糊邏輯
船舶避碰系統本質上是一個人、船、環境相互作用的不確定系統,具有本質的非線性、信息的不完全性和過程的時變性等特征,因而難以建立精確的數學模型來設計自動避碰系統。隨著模糊集出現及模糊系統理論不斷發展,模糊數學被逐步應用到船舶自動避碰領域中。
3.1模糊避碰決策模型及領域模型
對于模糊避碰決策模型,趙勁松等[17]提出船舶領域模糊邊界的概念,建立基于DCPA的避碰決策模擬模型。PIETRZYKOWSKI等[18-19]提出模糊船舶領域的概念并將其應用到受限水域航行安全性評估中;之后基于專家經驗,用模糊邏輯的方法進行人工神經網絡的自學習,提出動態模糊船舶領域模型,并在后期研究中考慮人、船、環境和《規則》的影響建立統一的領域模型。王寧[20]在四元船舶領域模型的基礎上結合模糊集理論,進一步提出更加智能、靈活和實用的模糊四元船舶領域模型(Fuzzy Quaternion Ship Domain,FQSD),為船舶的智能避碰決策提供新的判據;此后,其對模型進行改進,加入船舶、人為因素和環境因素等子模型,其中環境因素子模型的構建采用的就是模糊集理論。
3.2模糊避碰決策系統
PERERA等[21-24]提出基于模糊邏輯的避碰決策系統,并在此基礎上對整個智能避碰系統進行研究,該系統可滿足《規則》要求,但僅適用于兩船間的避碰;此后其又對設計的系統進行改進,提出基于“模糊-貝葉斯”的船舶智能避碰決策/執行模型,決策依靠模糊邏輯平行多決策模塊,并通過貝葉斯網絡模型將決策轉換成連續的避碰行動。BRCKO[25]提出一種基于模糊邏輯并結合ARPA雷達的避碰決策系統,利用ARPA提供的信息和《規則》的知識表示,該系統雖然簡單易行,但僅能提供對單船的智能避碰決策。
3.3基于VTS的模糊避碰決策
近年來,模糊理論也用于船舶交通管理系統(Vessel Traffic Services, VTS)中。SI等[26]用模糊邏輯方法為VTS設計一個船舶碰撞報警系統,可用于船間通信或作為一個碰撞報警平臺,但尚不能提供執行避碰操作的時機和舵角。此后,有學者提出改進的基于VTS的船舶避碰模糊決策方案,將碰撞報警系統的信息通過VTS安裝的模糊監控系統(Fuzzy Monitoring System,FMS)傳遞給船舶,為其提供施舵建議,但該系統只能提供轉向建議且不適用于多船會遇局面。此外,BUKHARI等[27]基于模糊推理系統提出一種在VTS中利用傳統雷達設備提供的信息實時計算多船碰撞危險的智能系統。
4 人工神經網絡
人工神經網絡(Artificial Neural Network,ANN)是由大量人工神經元經廣泛互連而形成的人工網絡,用以模擬人類神經系統的結構和功能。一些學者[28-29]將其應用于船舶領域及船舶碰撞危險度評價方面的研究中。鄭中義[30]以一船獲得的另一船的ARPA原始數據作為BP(Back Propagation)神經網絡的輸入,可快速確定碰撞危險度。歐陽慶等[31]對電子海圖系統中的避碰信息進行處理,建立開闊水域船舶自動避碰神經網絡決策模型,并充分考慮海圖數據(如水深)對避碰決策進行二次修正,但單一的網絡模型不能應對所有的船舶會遇局面,需構建一個組合神經網絡群。此外,單獨采用神經網絡方法解決船舶自動避碰決策問題尚不可行,與其他軟計算方法相結合是發展方向。LIU等[32]將神經網絡優越的非線性信息處理能力和學習功能與模糊技術相結合,提出適用于船舶在互見中的模糊神經網絡推理模型以提供避碰決策。AHN等[33]用模糊邏輯、專家系統、神經模糊算法和神經網絡研究一種自動避碰系統,神經模糊算法可平滑推理碰撞危險度,利用多層感知神經網絡及其學習過程重新建立一種既考慮DCPA和TCPA等傳統因素,又能考慮船舶領域、限制水域、能見度受限和高速船等外部航行數據的碰撞危險推理模型。
5 進化計算
進化計算(Evolutionary Computation, EC)是模擬生物進化理論而形成的一種全局優化自適應概率搜索的算法理論,其核心是進化算法(Evolutionary Algorithm,EA),主要包括遺傳算法(Generic Algorithm,GA)、進化規劃(Evolutionary Programming,EP)和進化策略(Evolutionary Strategies,ESs),可用于解決多類復雜系統的優化和機器學習等問題。EA的2個主要特點是群體搜索策略和群體中個體間的信息交換,在智能避碰中有很多指派好的路徑可供選擇,經過一系列的交叉、變異和選擇過程找到接近最優的路徑。
ITO等[34]首次用GA為船舶避碰尋找最優航路,并運用實習船“Shioji Maru”的操縱模擬器進行實時模擬測試,但未考慮《規則》。此后,ZENG等[35]提出基于GA的運動物體避讓模型,模型中移動的障礙物或運動的船舶由ARPA識別,碰撞危險度由一個基于Markov過程模型的隨機預測器得到。碰撞危險度的大小和航線的有效性體現在GA的代價函數中,且航速隨航行環境的變化和代價函數的取值而改變。因此,可用該算法調整航速優化避碰操作,在開闊水域避開靜止和運動的物體,但在擁擠水域需加上適當的約束條件。此外,前期研究中的GA編碼方式僅將船位(經緯度)作為染色體的基因,不便檢查試驗數據,ZENG等[36-37]逐步提出一種由船位、速度、潮汐、風速和海浪等擾動因素構造的單一基因的GA編碼方式。一個染色體代表一條規劃好的路徑,該路徑由基本的線段序列和轉向基因組成(見圖1)。起點基因代表當前位置,結束基因代表目標位置。若本船周圍有其他船舶或障礙物,則本船的安全路徑即是連接起點和結束點2個基因的直線;若本船周圍無障礙物,則會在起點和結束點之間隨機分布其他基因,構成多條不同長度的染色體,也即可能的路徑。每一路徑是否可行需用GA中的適應度函數來評估,最合適路徑對應的適應度函數的值最小。該方法能更有效地搜索到較優的安全航行路徑,并將《規則》加入到適應度函數中。
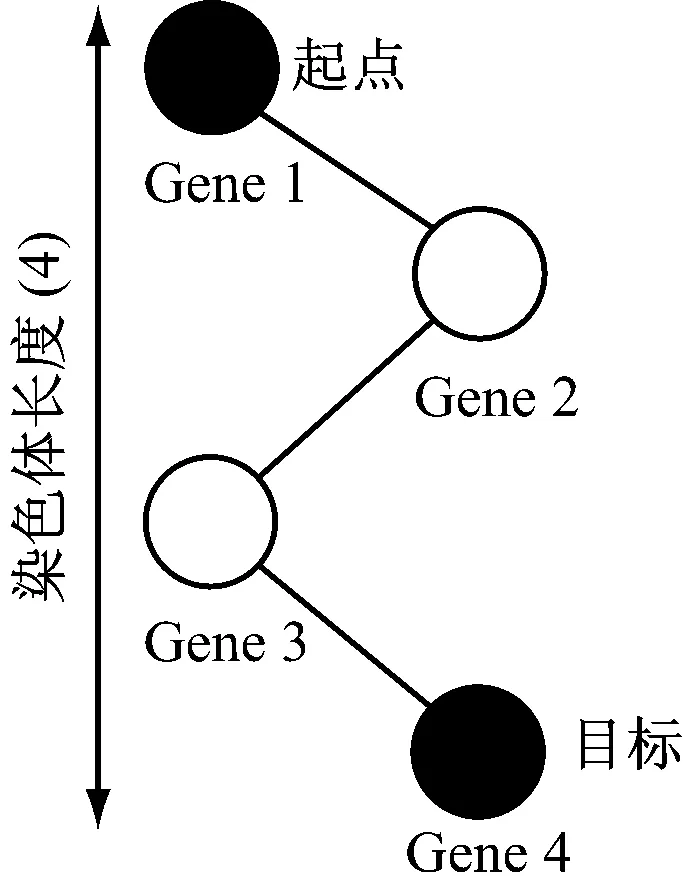
圖1 染色體結構
SMIERZCHALSKI等[38]對基于進化計算的路徑規劃算法(Evolutionary Planner/Navigator,EP/N)進行改進,提出EP/N++算法,形成船舶自動避碰決策支持系統的重要組成部分,能在給定的靜/動態環境下計算出一條安全的避碰最優路徑。該算法設計專門的遺傳算子對航線進行修正,同時采用另外一個遺傳算子對航速度進行變異操作,每個航向段的改變都可伴隨速度的變化,同時具有較短的計算時間。該系統的主要特征是引入時間參數、可變的航速及動態的他船時變的約束條件。
王則勝[39]基于GA建立船舶避碰決策模型,綜合考慮避讓航線的安全性、經濟性及《規則》的要求,得出較優的避碰方案;同時,利用Visual C++進行實例仿真。應士君等[40]在GA的基礎上使用Bayes模型,將平均信息量加入到GA的適應度函數中優化傳統的GA,得到更符合《規則》和海上避碰慣例的次優解。
TSOU等[41]用GA結合《規則》及船舶的安全領域提出理論上最安全的最短避碰路徑建議,并提供最優避碰轉向角度、復航時間和復航角度;同時為使用該系統的VTS操作員及駕駛員預警,并提供足夠的避碰準備時間。TAM等[42]基于進化計算,用已知和預報的航路及天氣數據對近距離會遇情況開發路徑規劃算法,仿真結果表明該算法具有航路優化、可避碰、遵循避碰規則和符合航海實際等優點。
6 人工免疫算法
免疫算法(Immune Algorithm,IA)將生命科學中的免疫概念及其理論應用到GA中,在保留原算法優良特性的基礎上,有選擇、有目的地利用待求解問題中的一些特征信息或知識來抑制其優化過程中出現的退化現象。許慶陽[43]采用混沌危險模式人工免疫算法搜索最優的船舶避碰策略,該算法以“抗體”編碼空間代替問題的參數空間,以親和度函數為評價依據,通過對“抗體”種群中個體位串的操作進行種群更新,建立一個迭代過程,最終搜索到避碰策略的最優解。白一鳴等[44]將危險模式免疫算法應用到船舶避碰策略優化中,結合船舶碰撞危險度及船舶運動數學模型等領域的知識,較快、較準確地進行船舶避碰策略優化。
7 群智能算法
群智能算法(Swarm Intelligence Algorithm, SIA) 也是一類來源于仿生學的優化算法,模仿的是社會性生物的群體性。代表性的SIA有蟻群算法(Ant Colony Optimization,ACO)、粒子群算法(Particle Swarm Optimization,PSO)、人工魚群算法(Artificial Fish Swarm Algorithm, AFSA)、細菌覓食算法(Bacteria Foraging Optimization,BFO)、人工蜂群算法(Artificial Bee Colony,ABC)及與EA相結合的差分演化算法(Differential Evolution,DE)。ACO和ABC主要用于求解組合優化問題,而其他算法則較適合進行連續優化。一些學者將其應用到海上船舶智能避碰領域中。TSOU等[45]應用ACO建立避碰模型,該模型包含航海實踐、海事法規和《規則》的知識系統及來自于AIS等的實時信息,可規劃出一條安全、經濟的近距離避碰路徑,平均執行速度比傳統的GA稍快;此外,在設置船舶安全區時選取的是圓形的警戒圈而非船舶領域,因此在模型精度及蟻群算法的并行處理方面仍需進一步完善。LAZAROWSKA[46-47]采用ACO并結合船舶運動數學模型和領域模型,將會遇局面中所有目標船(包括靜態障礙物)視為整體計算避碰最優方案,目標船領域模型可選,但假設目標船保向保速。王得燕[48]采用PSO求解多船會遇情況下本船的最優轉向角度值,并推薦采用一種具有量子行為的PSO建立船舶避碰目標函數,以提高算法的收斂性能,解決陷入局部最優問題。馬文耀等[49]利用BFO規劃船舶避碰航路,主要包括轉向時機、避讓航向改變量、復航時機及復航航向改變量等目標,模擬本船與右前(后)方目標船交叉會遇和對遇等3種態勢,在電子海圖上動態演示試驗過程。綜合分析自動避碰決策中采用的SIA主要融合了船舶運動數學模型、避碰規則解析、船舶領域模型及路徑規劃與優化問題。算法具有簡便易行、收斂速度快和經驗參數較少等優點,具有良好的應用前景,但尚存在易陷入局部極值點、搜索精度不高和進化后期收斂速度慢等缺點,因此仍需改進。
8 多智能體系統
多智能體系統(Multi-Agent Systems,MAS)是分布式人工智能(Distributed Artificial Intelligence, DAI)的一個重要分支,通過智能體的合作來完成任務求解。實現MAS的關鍵是多個智能體間的通信和協調。
郝清賦等[50]提出并實現一種基于Multi-Agent的協商避碰決策支持系統,其基于系統論的思想,將協商決策引入到船舶避碰中,以減少避碰決策中的不確定性,并提供網絡環境下的智能避碰決策支持。楊神化[51]構建一個基于Multi-Agent理論模型的多船舶Agent避碰決策支持系統,在避讓動態船舶、避淺避礁和綜合避碰等3個方面分別對船舶Agent的避碰決策算法進行研究;在會遇單船時,以兩船的相對距離值表征船舶Agent實施避碰措施的時機,并在對遇決策中采用協商算法;此外,對會遇多目標船及同時存在一艘動態目標船和水上水下障礙物的情況進行研究,提出由初始方案層、尋優層和協商層共同組成的分層避碰決策生成與優化算法。
9 灰色系統理論
灰色系統理論是一種處理動態系統的數學方法,用來描述部分信息已知、部分信息未知并介于黑白系統之間的系統,可對系統進行分析、建模、預測、決策和控制等。GM(1,1)模型是灰色理論中較常用的預測方法。高穎[52]初步探討基于GM(1,1) 預測模型的灰色預測理論和方法在船舶避碰決策方面的應用,為船舶避碰決策提供一種新的方法。這里采取“先緩沖后預測”的思想,通過引入緩沖算子改進GM(1,1)模型提高船舶避碰決策系統對目標船運動態勢和避碰時機預測的精確程度。此外,其對樣本量無特殊要求,分析時無需典型的分布規律,因而在避碰系統中大量傳感器數據誤差處理方面具有較高的應用價值。
10 總結與展望
在人工智能和軟計算中,專家系統應用于實船安裝測試較早,其關鍵在于完備“避碰知識庫”;模糊邏輯可準確反映專家對困難、復雜問題的求解,提供突破傳統專家系統設計瓶頸的途徑;BP單獨應用于船舶智能避碰決策中的實用性不強,但可充分利用其自學習能力完善“知識庫”;EC中,GA應用于避碰決策中的研究較多,關鍵在于選取合適的“適應度函數”,同時EC的避碰策略主要是施加一定限制條件的路徑優化,且可考慮《規則》;IA及其改進方法可較快、較準確地優化避碰決策;SIA和MAS具有內在結構的相似性,前者參數選擇非常重要,后者多個智能體間的通信和協調是關鍵,更加適用于協商式智能避碰;而灰色系統理論則在處理傳感器不精確信息方面具有較高的實用價值。
上述方法各有利弊,單獨采用某種方法只能解決自動避碰決策某方面的問題,因此目前的研究尚存在的問題有:未充分考慮能見度、受限水域及交通密度影響等環境因素,可避碰但不符合《規則》要求; 過度簡化本船和目標船的運動模式(假定來船為直航船保向保速,船舶尺度、類型及領域模型未充分考慮); 難以處理復雜的多船全局會遇局面(多集中于避碰單船和重點船,當無法預測他船運動時,采取自動避碰行動的全局有效性難以保證); 船舶以外的動、靜態障礙物未充分考慮; 避碰行動單一(多為轉向),未與航線優化有機結合,算法的性能和全局/局部收斂能力較弱; 多采用MATLAB進行仿真,未在船舶操縱模擬器測試平臺或實船上驗證。基于以上缺陷,建立一套以人類認知和決策理論為基礎,以現有的導助航儀器提供的平臺為依托,融合多種算法優點的混合智能決策支持系統將是自動避碰系統的發展方向。自動避碰系統獲得真正應用的前提是機器智能的不確定性低于駕駛員造成的人為不確定性。
[1] STATHEROS T, HOWELLS G, MCDONALD-MAIER K. Autonomous Ship Collision Avoidance Navigation Concepts, Technologies and Techniques[J]. The Journal of Navigation, 2008, 61(1):129-142.
[2] 孫立成. 船舶避碰決策數學模型的研究[D].大連: 大連海事大學, 2000.
[3] 彭麗麗. 基于AIS的內河船舶智能避碰專家系統及實現[D].武漢: 武漢理工大學, 2010.
[4] 張選逵. 基于AIS的船舶避碰專家系統研究[D].上海: 上海海事大學, 2006.
[5] 程細得, 劉祖源. 船舶智能避碰專家系統研究[J]. 武漢理工大學學報(交通科學與工程版), 2003,27(1):94-96.
[6] LEE H J, RHEE K P. Development of Collision Avoidance System by Using Expert System and Search Algorithm[J]. Ship Science & Technology, 2001, 48(3):197-210.
[7] TRAN T, HARRIS C, WILSON P. Vessel Management Expert System[C]//Daklard:Intelligent Transportation Systems, 2001:1102-1107.
[8] 朱沁. 多船會遇的船舶智能避碰專家系統研究與仿真[D].武漢: 武漢理工大學, 2004.
[9] 李麗娜, 熊振南, 任勤生. 多船避碰智能決策的生成與優化方法[J]. 信息與控制, 2003,32(2):189-192.
[10] 施平安, 陳文偉, 王敬全, 等. 基于神經網絡的復合避碰專家系統研究[J]. 航海技術, 2001(6):2-5.
[11] 郭艷紅, 鄧貴仕. 基于事例的推理(CBR)研究綜述[J]. 計算機工程與應用, 2004,40(21):1-5.
[12] 沈麗珺. 基于CBR方法的船舶避碰決策支持模型的研究[D].上海: 上海海事大學, 2007.
[13] LIU Y, YANG C, YANG Y, et al. Case Learning for CBR-Based Collision Avoidance Systems[J]. Applied Intelligence, 2012, 35(2):308-319.
[14] 周世波, 熊振南. 基于案例推理的船舶避碰案例庫設計與實現[J]. 中國航海, 2012, 35(3):71-75.
[15] 黃穎,李麗娜,李國定. 緊迫危險不可避免碰撞操船決策自動生成方法[J]. 中國航海, 2013,36(3):55-60.
[16] 劉健. 基于案例推理的知識系統的設計與實現[D].南京: 南京航空航天大學, 2004.
[17] ZHAO Jingsong, WU Zhaolin, WANG Fengchen. Comments on Ship Domains[J]. The Journal of Navigation, 1993, 46(3):422-436.
[18] PIETRZYKOWSKI Z. Ship Fuzzy Domain in Assessment of Navigational Safety in Restricted Areas, III[C]. Gdynia: Navigational Symposium, 1999,1:253-264.
[19] PIETRZYKOWSKI Z, URIASZ J. The Ship Domain-A Criterion of Navigational Safety Assessment in an Open Sea Area[J]. The Journal of Navigation, 2009, 62(1):93-108.
[20] WANG N. A Novel Analytical Framework for Dynamic Quaternion Ship Domains[J]. The Journal of Navigation, 2013, 66(2):265-281.
[21] PERERA L P, CARVALHO J P, GUEDES SOARES C. Decision Making System for the Collision Avoidance of Marine Vessel Navigation Based on COLREGs Rules and Regulations[C]//Proceedings of 13th Congress of International Maritime Association of Mediterranean, 2009:1121-1128.
[22] PERERA L P. Autonomous Guidance and Navigation Based on the COLREGs Rules and Regulations of Collision Avoidance[J]. 2010(1999):205-216.
[23] PERERA L P, CARVALHO J P, GUEDES SOARES C. Fuzzy Logic Based Decision Making System for Collision Avoidance of Ocean Navigation Under Critical Collision Conditions[J]. Journal of Marine Science and Technology, 2011, 16(1):84-99.
[24] PERERA L, CARVALHO J, GUEDES SOARES C. Intelligent Ocean Navigation and Fuzzy-Bayesian Decision Action Formulation[J]. IEEE Journal of Oceanic Engineering, 2012, 37(2): 204-219.
[25] BRCKO T, SVETAK J. Fuzzy Reasoning as a Base for Collision Avoidance Decision Support System[J]. Promet-Traffic & Transportation, 2013, 25(6):555-564.
[26] SI K, KJ L, CHANG K, et al. A Fuzzy Logic Method for Collision Avoidance in Vessel Traffic Service[J]. Journal of Navigation, 2007, 60(1):17-31.
[27] BUKHARI A C, TUSSEYEVA I, LEE B G, et al. An Intelligent Real-Time Multi-Vessel Collision Risk Assessment System from VTS View Point Based on Fuzzy Inference System[J]. Expert Systems with Applications, 2013, 40(4):1220-1230.
[28] LISOWSKI J, RAK A, CZECHOWICZ W. Neural Net-Work Classifier for Ship Domain Assessment[J]. Mathematics and Computers in Simulation, 2000, 51(3-4):399-406.
[29] ZHU X, XU H, LIN J. Domain and Its Model Based on Neural Networks[J]. Journal of Navigation, 2001, 54(1):97-103.
[30] 鄭中義. 船舶自動避碰決策系統的研究[D].大連: 大連海事大學, 2000.
[31] 歐陽慶, 趙德鵬. 電子海圖系統中船舶避碰的神經網絡方法的研究[J]. 大連海事大學學報, 1997, 23(3):1-6.
[32] LIU Yuhong, DU Xuanmin, YANG Shenhua. The Design of a Fuzzy-Neural Network for Ship Collision Avoidance[C]//Advances in Machine Learning and Cybernetics. Guangzhou: Springer Berlin Heidelberg, 2006.
[33] AHN J H, RHEE K P, YOU Y J. A Study on the Collision Avoidance of a Ship Using Neural Networks and Fuzzy Logic[J]. Applied Ocean Research, 2012, 37(0):162 - 173.
[34] ITO M, ZHNNG F, YOSHIDA N. Collision Avoidance Control of Ship with Genetic Algorithm[C]//IEEE International Conference on Control Applications, 1999,12:1791-1796.
[35] ZENG M X, ITO M, SHIMIZU E. Planning and Keeping the Safe Course to Avoid Collision at Sea with Genetic Algorithms[C]//IECON. 26th Annual Conference of the IEEE, 2000,4:2388-2393.
[36] ZENG X M, ITO M. Planning a Collision Avoidance Model for Ship Using Genetic Algorithm[C]//Systems, Man, and Cybernetics. 2001 IEEE International Conference, 2001,4:2355-2360.
[37] ZENG X. Evolution of the Safe Path for Ship Navigation[J]. Applied Artificial Intelligence, 2003, 17(2):87-104.
[38] SMIERZCHALSKI R, MICHALEWICZ Z. Modeling of Ship Trajectory in Collision Situations by an Evolutionary Algorithm[J]. IEEE Transactions on Evolutionary Computation, 2000, 4(3):227-241.
[39] 王則勝. 基于遺傳算法的船舶避碰決策研究[D].上海: 上海海事大學, 2005.
[40] 應士君,施朝健,楊神化. 基于bayes模型的遺傳算法在避碰航路設計中的應用[C]//全國博士生學術論壇—交通運輸工程學科論文集, 2005.
[41] TSOU M C, KAO S L, SU C M. Decision Support from Genetic Algorithms for Ship Collision Avoidance Route Planning and Alerts[J]. The Journal of Navigation, 2010, 63(1):167-182.
[42] TAM C, BUCKNALL R. Path-Planning Algorithm for Ships in Close-Range Encounters[J]. Journal of Marine Science and Technology, 2010, 15(4):395-407.
[43] 許慶陽. 危險模式人工免疫算法及其應用研究[D].大連: 大連海事大學, 2010.
[44] 白一鳴 , 韓新潔,孟憲堯. 危險模式免疫控制算法優化船舶避碰策略[J]. 中國航海, 2012, 35(2):29-32.
[45] TSOU M C, HSUEH C K. The Study of Ship Collision Avoidance Route Planning by Ant Colony Algorithm[J]. Journal of Marine Science and Technology, 2010, 18(5):746-756.
[46] LAZAROWSKA A. Ant Colony Optimization Based Navi-gational Decision Support System[J]. Procedia Computer Science, 2014, 35: 1013-1022.
[47] LAZAROWSKA A. Ship's Trajectory Planning for Collision Avoidance at Sea Based on Ant Colony Optimisation[J]. The Journal of Navigation, 2015, 68: 291-307.
[48] 王得燕. 粒子群算法在多船轉向避碰中的研究[D].無錫: 江南大學, 2009.
[49] 馬文耀,楊家軒. 基于細菌覓食算法的避碰航路優化研究[J]. 大連海事大學學報, 2013, 39(2):21-23.
[50] 郝清賦, 陳英武, 汪浩, 等. 一種新型船舶避碰決策支持系統的設計與實現[J]. 計算機工程與應用, 2003,39(15):222-225.
[51] 楊神化. 基于Multi-agent的船舶避碰決策支持系統[D].上海: 上海海事大學, 2008.
[52] 高穎. 基于GM(1,1)模型的船舶避碰決策的應用研究[J]. 中外企業家, 2011(12):124-126.
ArtificialIntelligenceandSoftComputationMethodsinAutomaticCollisionAvoidanceAlgorithmsforShips
LYUHongguang,YINYong,YINJianchuan,XUWen
(Navigation College, Dalian Maritime University, Dalian 116026, China)
U675.96
A
2016-01-11
國家高技術研究發展計劃(“八六三”計劃)課題(2015AA016404);中央高校基本科研業務費(3132016310);海洋公益性行業科研專項經費項目(201505017-4);遼寧省自然科學基金(201602081)
呂紅光(1981—),男,山西五臺人,講師,博士生,研究方向為海上智能交通系統。E-Mail:lh1350@163.com 尹 勇(1969—),男,湖北鄖縣人,教授,博士生導師,研究方向為虛擬現實技術、航海仿真技術。E-mail:bushyin_dmu@263.net
1000-4653(2016)03-0035-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32