基于GA-BP模型的船舶靠泊操縱智能化評價
2016-10-11 12:18:10陳錦標肖英杰
中國航海 2016年1期
陳錦標, 唐 瑤, 肖英杰
(上海海事大學 航運仿真技術教育部工程研究中心, 上海 201306)
基于GA-BP模型的船舶靠泊操縱智能化評價
陳錦標, 唐 瑤, 肖英杰
(上海海事大學 航運仿真技術教育部工程研究中心, 上海 201306)
為實現船舶靠泊操縱的智能化評估,使評價結果更為客觀、高效、公平,通過分析靠泊操縱過程,建立兩級評價指標體系;利用航海模擬器靠泊操縱數據庫,結合專家調查法和高斯擬合,得到各樣本的主觀評分,實現自動化評估。通過MATLAB編程,利用已有樣本集,訓練并測試改進的BP神經網絡(Genetic Algorithm-Back Propagation,GA-BP)模型,最終實現智能化評估。實例分析結果表明:改進的BP網絡的測試誤差為0.006 248 1,實際輸出與期望輸出的貼近性較好,證明利用已訓練好的網絡對靠泊操縱進行評估具有較高的便捷性、可靠性和客觀性。
水路運輸;船舶靠泊;智能評價;遺傳算法;BP神經網絡
Abstract: A two-level evaluation indexes system is set up based on the analysis of the berthing process. With the index system, the operation data in the training simulator database is reevaluated by experts to get subjective scores for each ope-ration sample. The subjective scores are processed with Gauss fitting and used as reference to train and test Genetic Algorithm-Back Propagation(GA-BP) model of the BP neural network. With the refined neural network the intelligent evaluation of ship handling operation gives more accurate, objective, and impartial evaluation. Tests indicate that the error of the improved BP neural network is as low as 0.006 248 1 and the system outputs are extremely close to those expected.
Keywords: waterway transportation; ship berthing; intelligent evaluation; genetic algorithm; BP neural network
船舶靠泊操縱是指船舶從防波堤入口或進港航道端部平穩地駛至并停靠泊位處所進行的全部操縱行為。對船舶靠泊操縱進行智能化評價不僅可以使評價實時化、便利化,而且能降低評價過程中人為因素的影響,使評價更加客觀、公正。
船舶靠泊操縱的主要評價方法是根據專家系統或層次分析法確定權重,然后通過采用模糊綜合評判法或在模糊綜合評判法的基礎上融合灰色關聯度法來實現自動化評估。[1-8]該評價方法受主觀因素的影響且過程歷時較長;而反向傳播(Back Propagation,BP)神經網絡能通過樣本訓練模擬人腦思考的過程,具有自組織和自學習的特點,是一種相對客觀的評價方法。需指出,BP網絡的訓練和測試樣本是基于層次分析法、模糊綜合評價法及灰色關聯度方法確定的,但在利用訓練好的網絡評價新的對象時,已極大地剔除評價過程中的主觀因素。這里試圖通過建立改進的BP神經網絡(Genetic Algorithm-Back Propagation,GA-BP)模型來實現船舶靠泊操縱的智能評估,以縮短評價時間、降低人為因素對評價結果的影響。
1 建立評價指標體系
在靠泊操縱過程中,應把握好擺好船位、控制余速和靠攏速度等3個環節。這里從操縱安全性、操縱熟練性和航跡平滑性等3個方面對靠泊操縱進行評價,建立船舶靠泊操縱評價指標體系(見圖1)。
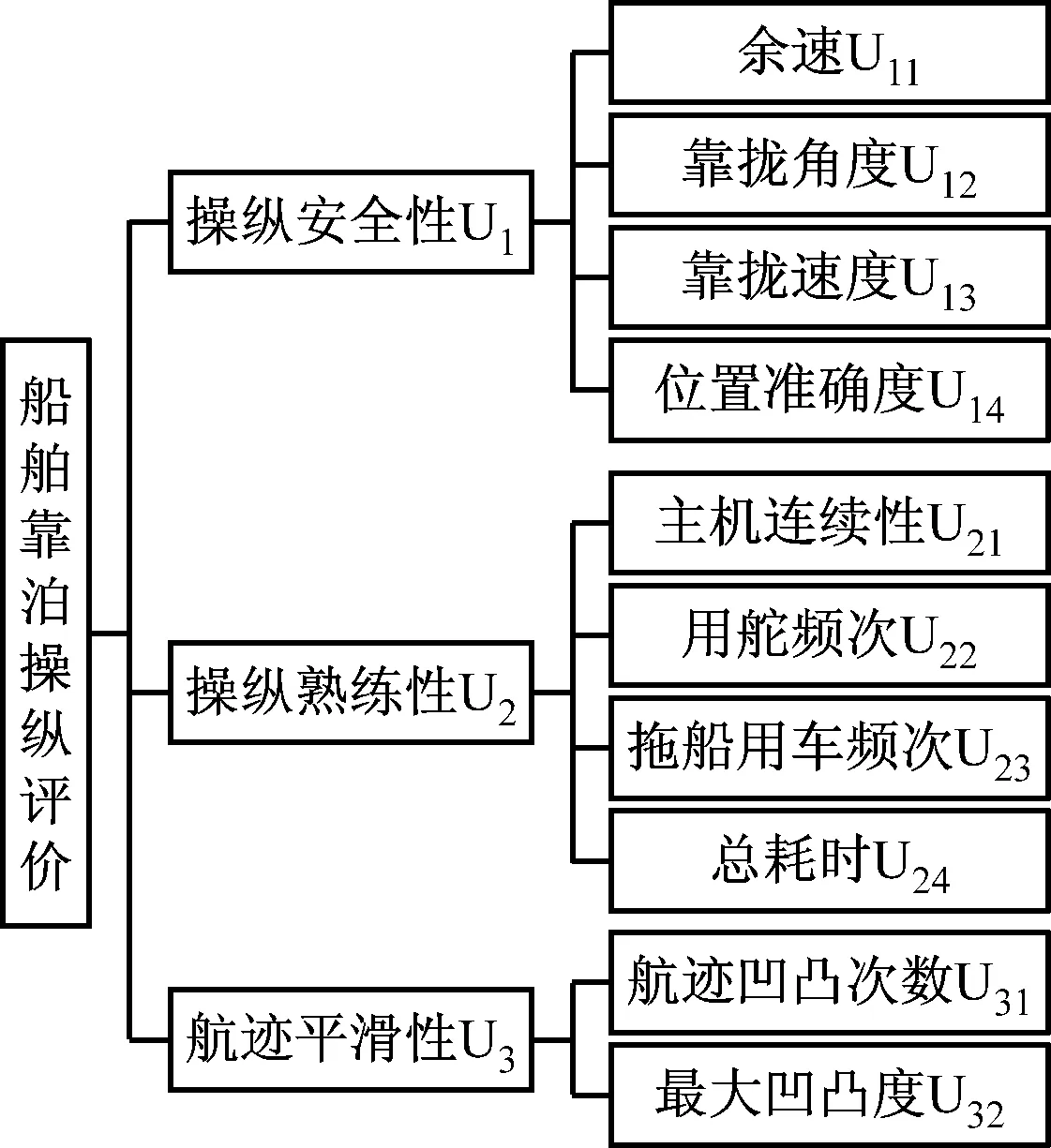
圖1 船舶靠泊操縱評價指標體系
靠泊操縱對駕駛員的最基本要求是保證本船、本泊位及其前后泊位已停靠船舶安全。這就要求駕駛員在靠泊時控制好余速并選擇合適的靠攏角度,以安全的速度完成靠泊操縱。在評價靠泊操縱的嫻熟性時,還應考慮對主機、舵機及拖船性能的掌握程度和使用情況。為更加全面地評判學員的靠泊操縱技能,也將航跡的平滑程度納入評價體系。需說明
1) 靠攏速度是指本船接觸碼頭的瞬間船速在垂直于泊位岸線方向上的分量。
2) 位置準確度是指靠泊后船舶中心沿泊位線方向到N旗的距離(見圖2中的D0)。

圖2 靠泊操縱示意圖
3) 主機連續性是指主機在整個靠泊操縱過程中維持某一車效不變的平均時長。
4) 航跡凹凸次數和最大凹凸度是指實際航跡偏離平滑航跡的頻次和幅度。
5) 航跡凹凸度是指在某一凹處(或凸處)存在以最凹點或最凸點為緯向中間點的D1和D2,這兩點到基準線的距離的平均值Dm與最凸點(或最凹點)到基準線的距離Dr的差值。
2 GA-BP網絡
2.1BP神經網絡
BP神經網絡是一個多層次的反饋模型,其特點是根據實際輸出與期望輸出的差值不斷調整各層鏈接權值,直到誤差在允許的范圍內。3層BP神經網絡[9]結構示意圖見圖3。

圖3 BP神經網絡結構示意圖
簡單的BP網絡模型的算法如下。
設輸入節點數為I,輸出節點數為O,指標集U={U1,U2,…,Un},樣本模式集為M,則第p個樣本的指標集U={Up1,Up2,…,Upn}。
1) 輸入層節點的輸出為
xi=upi
(1)
式(1)中:upi為樣本p的輸入;p=0,1,2,…,m;i=1,2,…,n。
2) 隱層節點的輸出為
(2)
式(2)中:vij(j=1,2,…,l)為輸入層節點i到隱含層節點j的鏈接權值;θj為隱含層第j個節點的閾值;f1(x)為Sigmoid函數。
3) 輸出層節點的輸出為
(3)
式(3)中:wjk為隱含層節點j到輸出層節點k的連接權值;θk為輸出層第k個節點的閾值;f2(x)同上。
總誤差為
(4)
式(4)中:tp為第p個樣本的期望輸出;zp為樣本模式p的輸出。
輸入層節點i到隱含層節點j的權值調整量為
(5)
隱含層節點j到輸出層節點k的權值調整量為
(6)
新的權值為
vij(n)=vij(n-1)+ηΔvij(n)+αΔvij(n-1)
(7)
wjk(n)=wjk(n-1)+ηΔwjk(n)+αΔwjk(n-1)
(8)
式(7)~式(8)中:α為動量系數,通常0<α<0.9;η為學習率,范圍在0.001~10。
2.2對BP神經網絡的改進
BP神經網絡主要存在隱含層節點難以確定、算法收斂速度慢和容易陷入局部極小值等3個問題。對此,將試湊法、LM算法和遺傳算法融入BP網絡,以改進網絡的適應性和準確性。
2.2.1試湊法確定隱層節點
隱含層節點過少會導致網絡無法較好地實現對樣本的學習;節點過多又會出現訓練時間較長和容錯能力下降的問題。因此,確定隱含層節點時通常很難找到最佳節點數,但只要所選節點數滿足誤差要求即可。目前有關節點數確定的經驗公式有3種[10],這里首先根據經驗公式初步確定選擇范圍,然后通過循環程序比較各節點數下網絡的學習能力和速度,從而選出較優的節點數。
2.2.2LM算法改進網絡的運算速度
BP神經網絡采用梯度下降算法,該算法在開始時下降很快,但當接近最優值時因梯度近似為零,目標函數下降緩慢;牛頓下降法可在最優值附近產生一個理想的搜索方向。Levenberg-Marquard(LM)算法集合了以上2種算法的優勢,在網絡權值較小時仍可迅速收斂。[11]其權值修正公式為
(9)
式(9)中:Wn+1為第n+1次迭代的權重;Jn為誤差對權重的偏分的雅可比(Jacobian)矩陣;μ為非負值,當μ→0時為Gauss-Newton法,當μ→∞時為標準梯度下降法;A為單位矩陣;E為累計誤差。
2.2.3GA算法改進BP網絡
遺傳算法[12](Genetic Algorithm, GA)是一種根據生物界自然選擇和自然遺傳機制建立的隨機化搜索算法。用該算法優化BP網絡的具體方式是通過優化BP網絡的初始權值和閾值,使其先達到最優解附近,從而避免BP網絡陷入局部最優值。GA-BP網絡算法的步驟為:編碼并確定初始種群數;選取適應度函數;確定被選中的概率;設定交叉變異算子;解碼最優值并訓練BP網絡。
3 實 例
3.1模擬對象及試驗工況
為驗證所建模型的合理性,借助上海海事大學航海模擬器模擬7萬噸級散貨船(編號為YLSG116R13)靠嘉興港獨山港區1號泊位,請具備不同操縱水平的人員(1名船長和29位學員)模擬船舶靠泊過程,共模擬30次,其中失敗0次,得到有效數據30組(記為樣本1,樣本2,…,樣本30)。本船的基本參數為:船長250 m,船寬32.3 m,吃水13.9 m,載重70 000 t,駕駛臺與船尾間距離30 m。船舶模擬試驗工況為:直接靠,風向315°,風級6級,流向070°,流速1.5 kn。
3.2數據采集
對30次操縱的數據記錄進行整理分析,得到各個二級指標的試驗值。理論上,萬噸級滿載船舶的艏部抵達泊位中間N旗外檔時其余速應≤2.0 kn。[13-14]但實際上,由于不同駕駛員對航向、航跡和航速的控制不同,船舶抵達泊位前沿時與泊位的距離有差異。因此,余速和靠攏角度均統一在船位距離泊位2倍船寬時測得。此外,關于位置準確度,取船舶中心點在泊位中心點后為正,否則為負。
3.3采用專家調查法確定學習樣本
為確定指標體系權重和評價二級指標的樣本值,向經驗豐富的船員及船舶操縱領域資深專家和學者發放調查問卷70份,收回有效問卷42份。經統計分析,得出一、二級指標的權重(見表1)和部分二級指標樣本值的評價結果。為保證調查結果的可靠性,將統計結果反饋給專家進行修正。

表1 一、二級指標權重
3.3.1權重
安全性指標對評價結果起決定性作用,而靠攏速度又是確保船舶和碼頭安全的關鍵因素。因此,首先對待評價對象的靠攏速度指標值進行評價,若超出安全值,則直接評判結果為不合格。
3.3.2隸屬度函數
首先,按集中度對每個二級指標的30個樣本值進行分組并取組中值,讓專家對組中值和特征點進行打分(0~1);同時,為保證評價具有一致性和層次性,咨詢評判專家確定各指標的下限(及格點),即下限的得分為0.6。然后,根據組中值和下限的得分進行高斯擬合并作適當調整,其中航跡凹凸次數是離散變量,簡單的分段函數即可表征其隸屬度情況。最后,由擬合函數求得樣本各指標的得分。以指標位置準確度、拖船用車頻次和航跡凹凸次數為例,給出其擬合函數和圖像(見圖4~圖6)。30個樣本的各個指標得分及加權后綜合得分情況見圖7。

圖4 指標“位置準確度”的樣本值的隸屬度函數
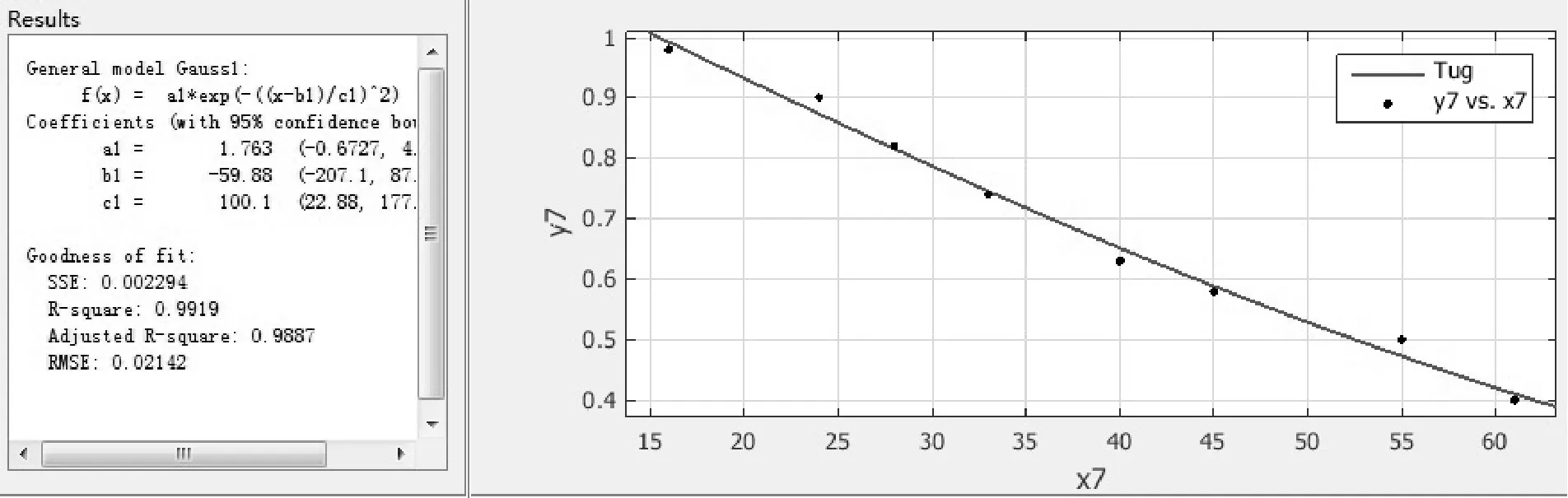
圖5 指標“拖船用車頻次”的樣本值的隸屬度函數

圖6 指標“航跡凹凸次數”樣本值的隸屬度函數

圖7 樣本集綜合得分
4 GA-BP網絡的實現過程
4.1網絡結構的確定
根據經驗公式初步確定隱層節點數的選擇范圍為[18,26]。表2為各節點數下網絡的訓練誤差,可知隱含層節點數應為24。

表2 各節點數下網絡的訓練誤差
4.2GA-BP算法實現及結果分析
取30組樣本數據中的25組作為訓練樣本,另外5組作為測試樣本。考慮到輸入數據存在不可公度性和奇異性、直接輸入模型輸出結果會受到大量綱數據的影響且會屏蔽掉小量綱數據所反映的信息,需對訓練樣本和測試樣本的輸入作歸一化處理。由于選用Sigmoid函數作為激勵函數,其在函數值為0和1附近的變化較小,接近于平坦,因此將輸入數據歸一到[0.1,0.9]內。
(10)
GA-BP網絡算法流程見圖8。算法運行多次,得到訓練樣本和測試樣本的平均誤差,取其最小值作為訓練仿真結果。圖9為最優結果的訓練樣本的誤差分布,可看出樣本的訓練多數集中在[-0.04,0.02]內,但訓練樣本13,17和19的誤差較大,為異常數據點。這是輸入數據的維度(10)較高,而樣本集容量不夠充分造成的。圖10為進化過程中測試樣本每代的平均誤差變化,從中可看出,在第50代時測試樣本的均值誤差已在精度0.01以下。

圖8 GA-BP網絡算法流程

圖9 最優結果的訓練樣本的誤差分布

圖10 進化過程中測試樣本的平均誤差變化
表3為網絡輸出與目標輸出對比,從中可看出,當用遺傳算法對權值和閾值進行優化之后,網絡的測試誤差和訓練誤差減小很多,網絡訓練的結果更加貼近樣本的目標輸出。

表3 網絡輸出與目標輸出對比
5 結束語
根據訓練樣本和測試樣本對GA-BP網絡進行訓練仿真,得到的結果較為理想,實際輸出與目標輸出差距很小。保存訓練好的網絡,并將待評估對象的二級指標值輸入至已保存的網絡中,得到的輸出即為該對象的綜合得分。這樣即實現船舶靠泊操縱的智能化評價。從實例中可看出,為使模型能處理各種對象,需增加訓練樣本的容量、加大樣本之間的差異化。此外,由于不同的風和流對靠泊操縱的影響不相同,需要根據實際情況調整訓練樣本的擬合函數,使評價結果更加靈活、可靠。
[1] 王德龍,任鴻翔,趙月林,等.船舶操縱模擬器進出港操縱自動評估系統[J].大連海事大學學報,2014,40(2):27-30.
[2] 王德龍.船舶操縱模擬器實操自動評估系統初步研究[D].大連:大連海事大學,2013.
[3] 薛滿福,房希旺,任鴻翔.船舶靠泊操縱評估模型[J].中國航海,2013,36(3):46-49.
[4] 房希旺.基于航海模擬器的操船評估模型及應用[D].大連:大連海事大學,2008.
[5] 包國江.基于航海模擬器的船舶操縱評估系統的研究[D].大連:大連海事大學,2008.
[6] HSU, KEVIN W K. Assessing the Safety Factors of Ship Berthing Operations[J]. Journal of Navigation,2015,68 (3):576-588.
[7] 陳錦標,吳廣宇,應士君.基于灰色模糊綜合評估法的大型船舶模擬操縱評價[J].上海海事大學學報,2008,29(4):1-5.
[8] 邱云明,陳偉炯,陳錦標.臨海港口航道航行環境安全綜合評價模型[J].中國航海,2005(3):41-45.
[9] 胡志武,程葆明,陳延才.基于BP神經網絡的船員適任性評價模型[J].上海海事大學學報,2010,31(4):23-27.
[10] 李文娟.改進BP神經網絡在水質評價中的應用研究[D].重慶:重慶理工大學,2011.
[11] AHMED Y A, HASEGAWA K. Automatic Ship Berthing Using Artificial Neural Network Trained by Consistent Teaching Data Using Nonlinear Programming Method[J].Engineering Applications of Artificial Intelligence,2013,26(10):2287-2304.
[12] 楊鳴,施偉鋒.基于多種群遺傳神經網絡的船舶發電機故障診斷[J].上海海事大學學報,2013,34(4):18-22.
[13] 洪碧光.船舶操縱[M].大連:大連海事大學出版社,2008:66-68.
[14] 房希旺,何欣,楊林家.船舶操縱[M].大連:大連海事大學出版社,2012:91-93.
IntelligentEvaluationofShipBerthingOperationBasedonGA-BPModel
CHENJinbiao,TANGYao,XIAOYingjie
(Engineering Research Center of Shipping Simulation, Ministry of Education, Shanghai Maritime University, Shanghai 201306, China)
2016-01-11
國家科技支撐計劃課題(2015BAG20B05)
陳錦標(1965—),男,上海人,副教授,博士生,從事載運工具運用及船舶操縱研究。E-mail:jbchen@shmtu.edu.cn 唐 瑤(1993—),女,河南衛輝人,碩士生,從事載運工具運用研究。E-mail:tangyao93@163.com
1000-4653(2016)01-0064-05
U675.921
A
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
