船舶預測復航限制時間模型及算法驗證
2016-10-11 12:18:09王鵬鯤陳國權李麗娜
中國航海 2016年1期
王鵬鯤, 陳國權, 李麗娜, 馬 峰, 梅 強
(集美大學 航海學院, 福建 廈門 361021)
船舶預測復航限制時間模型及算法驗證
王鵬鯤, 陳國權, 李麗娜, 馬 峰, 梅 強
(集美大學 航海學院, 福建 廈門 361021)
為減少人為操縱的失誤和判斷錯誤,研發(fā)船舶擬人智能避碰決策(Personifying Intelligent Decision-making for Vessel Collision Avoidance,PIDVCA)算法,基于《國際海上避碰規(guī)則》和駕駛員的通常做法,為駕駛員提供碰撞危險情況下的合理操縱措施。為模擬有經驗駕駛員的優(yōu)良船藝及其通常做法,在該算法中引入預測復航限制時間(Tc-Forecast Recovery Limited Time of Ship)的概念并建立計算模型。基于前期總結的目標船交會特征,通過船舶會遇相對運動幾何分析推證Tc模型的完整性,總結出驗證Tc算法完備性的三船會遇在本船向左和向右避讓情況下的30種基本態(tài)勢,并通過仿真試驗進行驗證。該研究對推動PIDVCA算法的具體應用具有實際意義。
水路運輸;預測復航限制時間;模型;仿真;驗證
Abstract: The Personifying Intelligent Decision-making for Vessel Collision Avoidance(PIDVCA) has been developed based on the Convention on the International Regulations for Preventing Collisions at Sea(COLREGs)and the common navigation practice to help deck offices to make right judgment and proper decision in complicated situations. A parameter, named the forecast recovery limited time of ship, is introduced in the algorithm to represent the human judgment criteria. The calculation model is also developed. The integrity of the calculation model is checked by trying the model in various encounter situations. 30 types of 3 ship encounter situations are tested, which are determined according to relative motion geometric analysis.
Keywords: waterway transportation; forecast recovery Limited time of ship; model; simulation; verification
在海上多船(≥3艘)航行會遇態(tài)勢中,船舶駕駛員通常通過借鑒《國際海事避碰規(guī)則》(以下簡稱《規(guī)則》)并利用船舶間的甚高頻(Very High Frequency, VHF)協(xié)調避讓重點船舶,而該方式可能會造成避碰責任混淆。有經驗的駕駛員通常會根據雷達顯示的他船的速度矢量、長度及相對運動線等信息來判斷本船應操的舵角和航速,使本船在讓過重點船舶并及時復航后有效讓清所有船舶,既避免碰撞,又體現決策的科學合理性。對此,集美大學為模擬有經驗的駕駛員在避讓行動中表現出的優(yōu)良船藝及其通常做法,提出船舶擬人智能避碰決策(Personifying Intelligent Decision-making for Vessel Collision Avoidance,PIDVCA)方法[1-7],通過機器學習方法并結合海員的通常做法和專家系統(tǒng)構建避碰知識庫;根據獲取的船舶交會特征和避讓屬性等自動生成智能避碰決策,并將算法集成到仿真平臺上實現開闊水域多船智能避碰決策仿真。為正確判斷實施船舶避碰決策后是否有新的潛在危險出現,引入本船的預測復航時間(Tr-Forecast Recovery Time of Ship)和目標船的預測復航限制時間(Tc-Forecast Recovery Limited Time of Ship)的概念[1],為智能避碰決策提供依據。通過對Tc模型的完整性及其算法的完備性進行驗證,有效佐證PIDVCA方法中關鍵模型及算法的合理性。這里采用相對運動幾何圖解分析本船改向后目標相對運動線的變化規(guī)律,對Tc計算模型的完整性進行全面推證,總結出相應的基本會遇態(tài)勢,并通過仿真實驗驗證Tc算法的完備性。該研究能提高PIDVCA算法的魯棒性,推動其在開闊水域船舶智能避碰輔助決策系統(tǒng)[2]中的實際應用,為受限水域的后續(xù)研究奠定基礎;同時,有助于駕駛員正確判斷航行危險的狀況。
1 Tc模型的完整性推證
1.1Tc概念
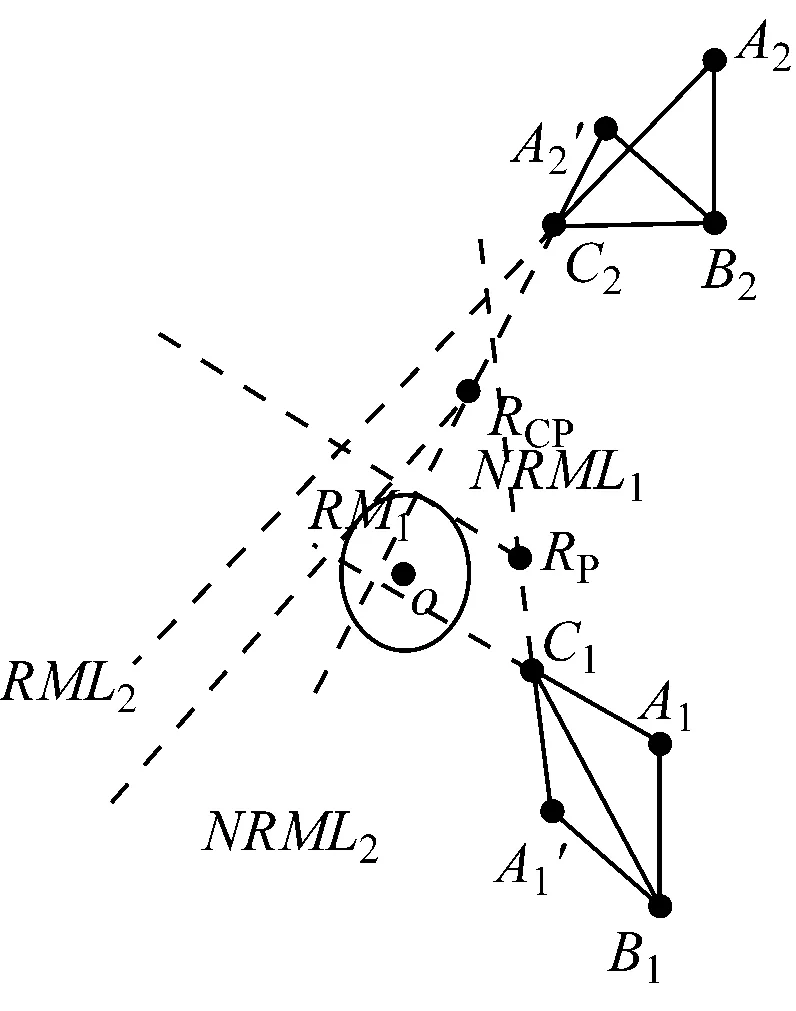
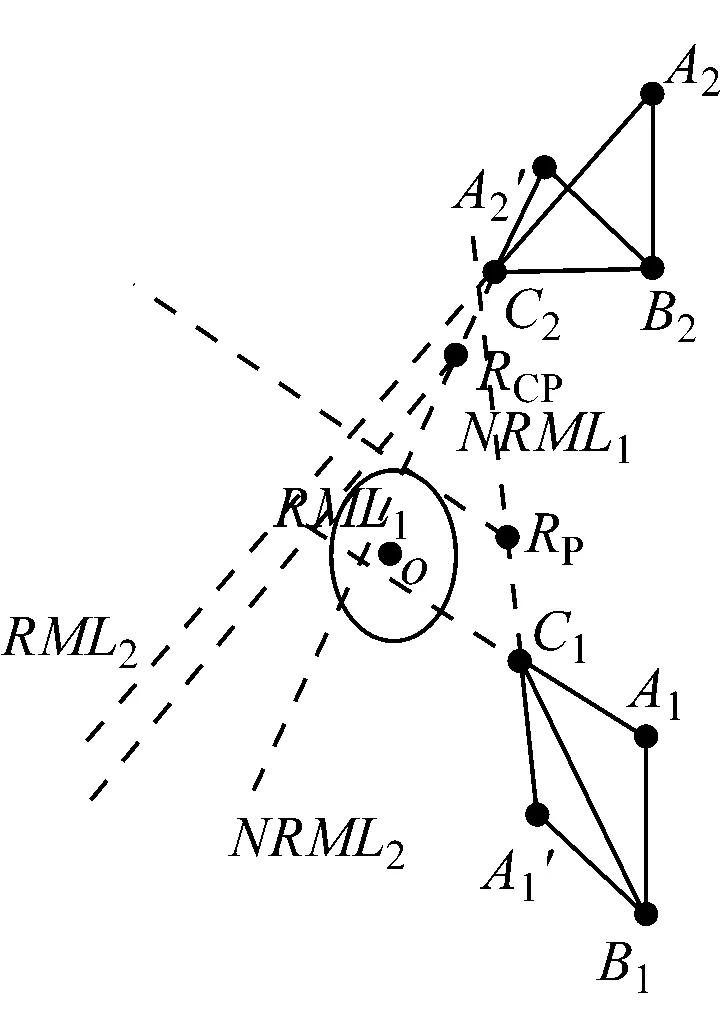
當多艘船舶會遇(這里以三船會遇為例,圖1為三船會遇本船向右改向相對運動幾何圖解)時,本船O為避免與目標船1構成緊迫局面而采取向右改向避讓行動,此時可能會與目標船2構成潛在緊迫局面。在該情況下,駕駛員能憑借對態(tài)勢(即相對運動矢量的長短)的正確評估直觀判斷是否真正與目標船2構成潛在的緊迫局面。為正確模擬駕駛員的直觀判斷[3],在PIDVCA方法中引入Tr和Tc的概念,根據兩者的大小關系進行精確判斷。
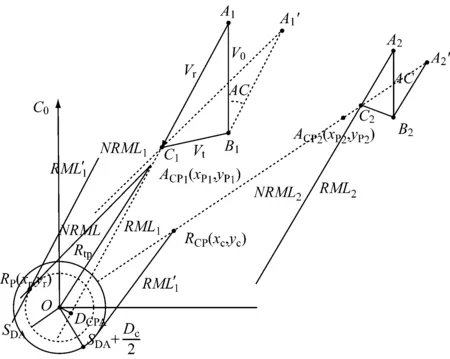
圖1 三船會遇本船向右改向相對運動幾何圖解
圖1給出三船會遇、本船船首向上情況下,雷達標繪圖上本船改向AC避讓目標船的施舵點Ci,轉向點ACP,預測復航點Rp及復航限制點RCP的示意,其中RCP為本船改向后避免與目標船2形成新危險的預測復航限制點。
顯然,Tr就是從ACP(xp1,yp1)到ACP(xr,yr)的航行時間。考慮船舶的旋回條件和安全會遇距離SDA[4,8],Tc就是新危險目標船2從ACP(xp2,yp2)到RCP(xc,yc)的航行時間。
1.2Tc模型推導

(1)
本船改向后目標船2相對運動線(NRML2)方程為
y=xcotCrn+CPAn/sinCrn
(2)
式(2)中:CPAn的正負取決于直線方程的走向及sinCrn的值。

(3)
為使上述方程均成立,應使Cr和Crn都不等于0°,90°,180°及270°。下面討論特殊角情況。
1) 僅Cr特殊
(1)Cr為0°或180°時,式(1)變?yōu)?/p>
x=sign(SDA+Dc/2)
(4)
此時
(5)
(2)Cr為90°或270°時,式(1)變?yōu)?/p>
y=sign(SDA+Dc/2)
(6)
此時
(7)
2) 僅Crn特殊
(1)Crn為0°或180°時,式(2)變?yōu)?/p>
x=CPAn
(8)
此時
(9)
(2)Crn為90°或270°時,式(2)變?yōu)?/p>
y=CPAn
(10)
此時
(11)
3)Cr與Crn的特殊
(1)Cr為180°,Crn為90°或270°時
(12)
(2)Cr為90°或270°,Crn為0°時
(13)
根據兩點式方程,Tc計算模型為

(14)
1.3Tc模型的完整性推證
Tc模型的完整性推證集中在求解xc或yc的sign取值,而sign取值是由船舶的不同交會狀態(tài)及相對運動線通過艏/艉的Y軸截距或通過右舷/左舷的X軸截距共同決定的。若本船復航后目標船的相對運動線通過艏部,而SDA/sinCr值為負,則sign的取值必須保證截距為正,此時sign取-1。sign取值見表1。
2 Tc算法完備性論證
2.1論證流程設計
為論證Tc算法的完備性,從幾何圖的角度分析Tc模型理論,通過對多種會遇態(tài)勢的幾何圖形進行分析探究該模型的幾何規(guī)律;同時,基于Tc模型的幾何規(guī)律,借助船舶智能操控仿真平臺進行仿真實驗,從實際操船的角度驗證Tc模型對航行安全的輔助決策作用,從而通過理論與實踐相結合驗證Tc模型的合理性。
2.2相對運動幾何分析
以相對于本船的會遇、追越和交叉等3種態(tài)勢建立4個區(qū)域。考慮初始危險船和潛在危險船在不同區(qū)域內的會遇態(tài)勢,從幾何態(tài)勢圖分析的角度來驗證Tc模型的合理性。
根據劃分的船舶會遇態(tài)勢,分別將危險船和潛在危險船置于所劃分的區(qū)域內。劃分過程中,將船舶1作為初始危險船,船舶2作為潛在危險船,分別位于4個不同區(qū)域內。圖2為船舶會遇區(qū)域劃分。

表1 sign取值
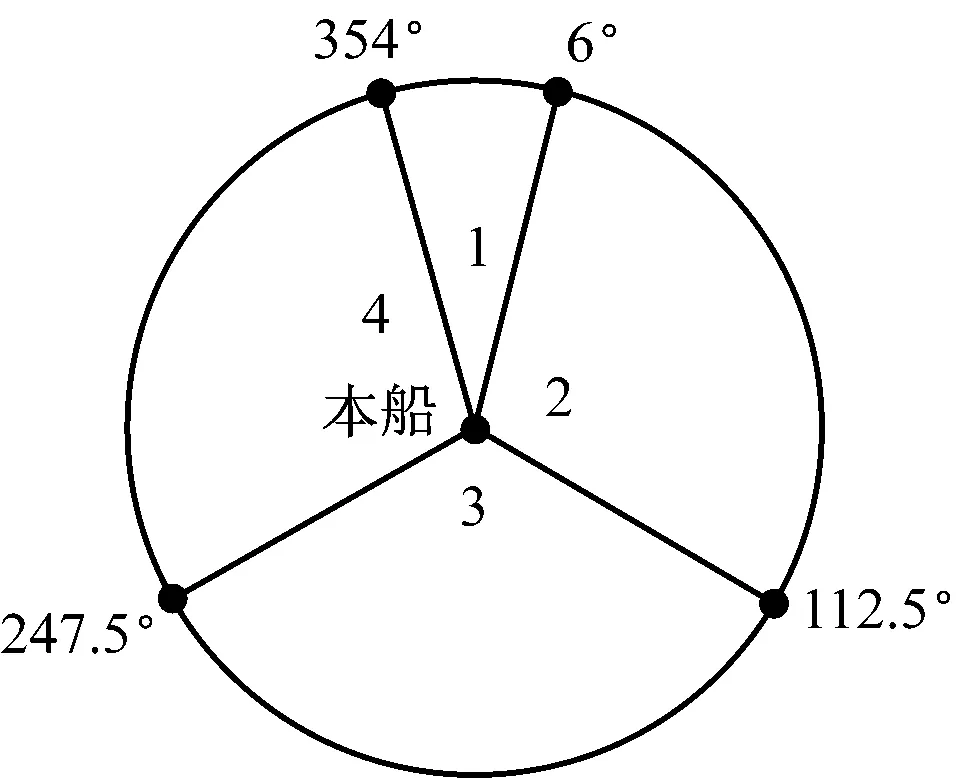
圖2 船舶會遇區(qū)域劃分
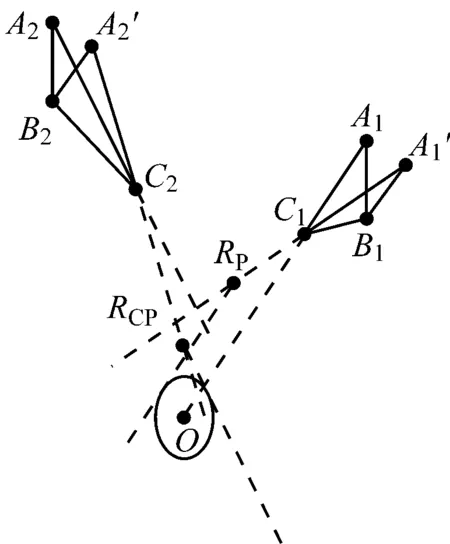
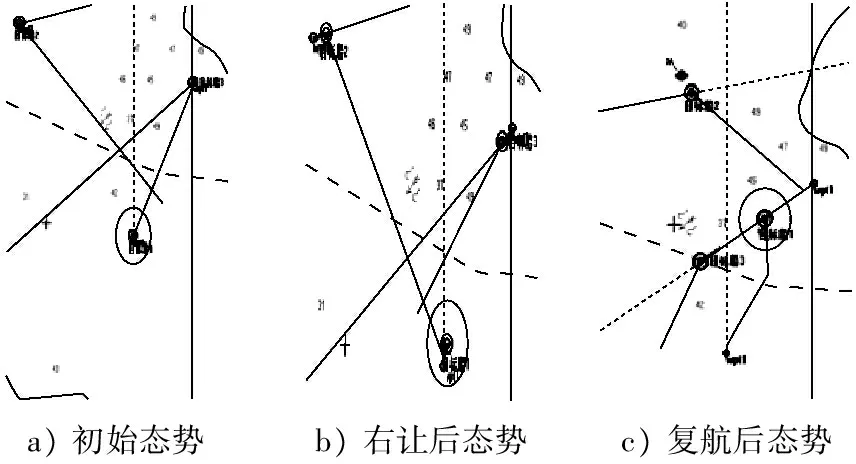
以初始危險船1所在的區(qū)域為前提,對潛在危險船改向后所在的區(qū)域進行整理和三船會遇態(tài)勢劃分。根據《規(guī)則》對右讓的會遇態(tài)勢進行分析,若危險船處于對遇和右交叉狀態(tài),則本船需采取右讓措施[9],潛在危險船按照兩船15種交會特征[5]劃分;對于左讓會遇態(tài)勢,由于采取右讓措施不僅不能規(guī)避危險,還會造成新的更加緊迫的危險,因此危險船設置為右追越船,此時潛在危險船按照兩船15種交會特征進行劃分。在此基礎上,充分考慮Tr>Tc和Tr 1) 由于Tc模型是針對潛在危險船進行的幾何分析,危險船區(qū)域的劃分對其沒有影響,且在右讓態(tài)勢劃分中危險船處于對遇和追越態(tài)勢的情況下對潛在危險船是一致的,因此右讓態(tài)勢為15種;對于左讓態(tài)勢,由于危險船設置為右追越船,因此潛在危險船按照15種交會特征劃分,為15種會遇態(tài)勢。 2) 在確定交會特征的情況下,潛在危險船相對本船的方位、所在區(qū)域及sign值都是確定的,而兩船的15種交會特征充分考慮各種會遇態(tài)勢,因此對這15種交會特征進行分析能確保Tc模型對潛在危險船態(tài)勢的完整性。 2.2.1 右讓幾何分析 以典型的船舶會遇狀況為例進行幾何分析。本船正橫前兩側有2艘船舶,初始危險船在2區(qū)域,潛在危險船在4區(qū)域,船舶1有緊迫危險,船舶2在本船改向后與本船的DCPA小于安全會遇距離,存在潛在危險。下面分別針對Tc>Tr和Tc≤Tr兩種情況進行幾何分析圖解(見圖3)。 a) (2,4)區(qū)域,Tc≤Tr b) (2,4)區(qū)域,Tc>Tr 在圖3a中,目標船從C1行駛到RP點的時間Tr大于目標船2從點C2到RCP的時間,意味著本船改向后使目標船1從安全會遇距離之外通過時,目標船2已到達或越過RCP點,此時船舶復航不能使目標船2安全通過,在該情況下原方案被否決,必須以目標船2為避讓重點船舶重新決策;在圖3b中,目標船從C1航行到RP點的時間Tr小于目標船2從點C2航行到RCP的時間,意味著在目標船1航行到RP時,本船復航,能與目標船2安全駛過讓清,原方案有效。 2.2.2 左讓幾何分析 分別針對Tc>Tr和Tc≤Tr兩種情況進行幾何分析圖解(見圖4)。 在圖4a中,船舶1在本船改向后從C1點航行到RP的時間小于船舶2從C2點航行到RCP的時間,意味著本船改向后船舶1航行到RP點時船舶2還沒到RCP,此時復航船舶1和船舶2都能從安全會遇距離駛過;反之在圖4b中,船舶1在本船改向后從C1點航行到RP的時間大于船舶2從C2點航行到RCP的時間,船舶2到達RCP點時船舶1還沒有航行到RP點,說明原方案失效,被否決,必須以目標船2為避讓重點船舶重新決策。 a) (2,3)區(qū)域Tc>Tr b) (2,3)區(qū)域Tc≤Tr 上述2個例子進一步說明Tc算法的建立可有效模擬優(yōu)秀海員的優(yōu)良船藝,提升避碰決策的合理有效性。 在對Tc模型進行定性分析之后,針對Tc算法可提高航行安全性,通過調用模型庫中的Tc模型計算相應的數值,檢驗Tc模型的完整性。對所分的態(tài)勢圖進行模擬仿真,檢驗PIDVCA算法中模擬海員通常做法的通用型算法[6]在Tc≥Tr和Tc 3.1右讓仿真試驗 針對上述右讓幾何分析圖中的Tc>Tr的情況進行仿真,仿真測試圖見圖5。 a)初始態(tài)勢b)右讓后態(tài)勢c)復航后態(tài)勢 圖5 三船會遇本船右讓仿真測試圖 圖5a為初始的船舶態(tài)勢圖,由于Tc>Tr,本船采取改向措施避讓目標船3,避讓期間目標船2的相對運動線進入危險區(qū)域,但其潛在危險在目標船3駛過讓清并復航后已消失,沒有構成碰撞危險,證明目標船2在本船復航時還未到達復航限制點RCP,Tc模型針對右讓態(tài)勢圖合理有效,能按照Tc>Tr的判斷結果采取正確的避碰行動。 3.2左讓仿真試驗 針對左讓幾何分析圖的Tc>Tr進行仿真模擬,仿真測試圖見圖6。 a)初始態(tài)勢b)左讓后態(tài)勢c)復航后態(tài)勢 圖6 三船會遇本船左讓仿真測試圖 圖6a中,由于Tc>Tr,本船采取改向措施避讓目標船3,避讓期間目標船2的相對運動線進入危險區(qū)域,但其潛在危險在目標船3駛過讓清并復航后已消失,沒有構成碰撞危險,證明目標船2在本船復航時還未到達復航限制點RCP,Tc模型針對左讓態(tài)勢圖合理有效,能按照Tc>Tr的判斷結果采取正確的避碰行動。 對于Tr>Tc,目標船1采取避讓決策不能避免潛在危險,需要以目標船2為避讓重點船重新決策。 在對幾何分析的三船態(tài)勢圖進行仿真之后,通過分析改向和復航期間相對運動線的變化規(guī)律,驗證Tc模型算法對于會遇態(tài)勢的適用性,從而證實幾何分析的正確性。 對船舶智能避碰系統(tǒng)研究中涉及到的求取Tc和Tr的數學模型繪制幾何模型圖,通過分析左讓和右讓潛在危險船對15種交會特征的初始非危險目標船構成的30種基本會遇態(tài)勢,驗證Tc模型對三船基本會遇態(tài)勢的適用性,從理論上證明模型的正確性和算法的完備性。通過分析60個模擬試驗,驗證Tc模型的正確性及其對相應會遇態(tài)勢的適用性,證明幾何分析的正確性和合理性。研究結果表明:Tc模型對基本會遇態(tài)勢具有適用性,算法完備,能給出正確的結果;該模型可提高其作為避碰決策系統(tǒng)技術基礎的可靠性及PIDVCA算法的魯棒性,使PIDVCA算法能有效模擬海員的優(yōu)良船藝,進而為駕駛員提供正確合理的避碰決策方案,在提高航行的安全性和避碰行動的高效性方面發(fā)揮積極作用。 [1] 李麗娜,熊振南,任勤生.多船智能避碰決策的生成與優(yōu)化方法[J].信息與控制,2003,32(2):189-192. [2] LI Lina, YANG Shenhua, SUO Yongfeng,etal. Automation Method for Personifying Intelligent Decision-making for Vessel Collision Avoidance[C].The Proceeding of IEEE ICAL Conference,2008:1876-1881. [3] 李麗娜,王俊玲,陳國權.船舶擬人智能避碰決策理論的集成機器學習策略[J].信息與控制,2011,40(3):359-368. [4] 李麗娜.船舶自動避碰研究中安全會遇距離等要素的確定[J].大連海事大學學報,2002,28(3):23-26. [5] 黃穎. 船舶緊迫危險避碰決策方法研究[D].廈門:集美大學,2013. [6] 李麗娜,陳國權,邵哲平,等. 船舶擬人智能避碰決策方法及其評價標準的構建[J].大連海事大學學報,2011,37(4):1-5. [7] 周偉.寬水域船舶智能避碰決策算法驗證及優(yōu)化[D].廈門:集美大學,2011. [8] 畢修穎,賈傳熒,谷春國. 最小安全會遇距離和注意會遇距離的確定[J].大連海事大學學報,2001,27(1):24-28. [9] 司玉琢,吳兆麟.船舶碰撞法[M].大連:大連海事大學出版社,1991:500-503. IntegrityVerificationofCalculationModelforForecastingRecoveryLimitedTimeofShip WANGPengkun,CHENGuoquan,LILina,MAFeng,MEIQiang (Navigation College, Jimei University, Xiamen 361021, China) 2015-10-29 國家自然科學基金(60774066);福建省自然科學基金(2012D031) 王鵬鯤(1993—),男,山西呂梁人,碩士生,主要研究方向為交通信息工程及控制。E-mail:335938626@qq.com 李麗娜(1962—),女,福建泉州人,教授,碩士生導師,主要從事海上智能交通系統(tǒng)的理論與技術研究。E-mail:lln668@163.com 1000-4653(2016)01-0055-05 U676.1 A
3 Tc算法仿真驗證

4 結束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38艦船科學技術(2022年14期)2022-09-22 03:07:40艦船科學技術(2022年2期)2022-03-29 01:12:44中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22船舶標準化工程師(2019年4期)2019-07-24 07:21:12中國船檢(2017年3期)2017-05-18 11:33:09光學精密工程(2016年6期)2016-11-07 09:07:19核科學與工程(2015年4期)2015-09-26 11:59:03
