單目視覺障礙物測距精度分析
2016-10-09 08:37:06王澤民高俊釵
電子測試 2016年18期
王澤民,高俊釵
(西安工業大學,電子信息工程學院,西安,710021)
單目視覺障礙物測距精度分析
王澤民,高俊釵
(西安工業大學,電子信息工程學院,西安,710021)
在單目視覺障礙物測距模型中,分析了可視距離與安裝高度和俯視角度的關系,研究了影響測距精度的因素:攝像機的安裝高度、俯視角度和障礙物檢測的圖像位置,建立了誤差的數學模型并進行了仿真,定量計算了在一定的條件下引入的誤差。根據攝像機的內參數和攝像機視距的影響因素確定了合適的安裝參數,在此安裝參數下,對攝像機視距隨障礙物像素位置的變化及測距精度隨影響因素的變化情況進行了仿真,仿真結果有助于選擇誤差小的區域,從而提高測距的精度。
單目視覺;障礙物測距;測距模型;測距誤差模型
0 引言
隨著科技的進步和汽車工業的發展,基于計算機視覺的智能車輛主動安全系統逐漸成為各汽車制造廠商和科研機構中的研究熱點。作為智能車輛視覺導航主動安全系統不可缺少的一部分,障礙物檢測的研究也受到了廣泛的重視。基于激光雷達的障礙物檢測,可以獲取前方障礙物距離、相對速度和方位角等方面信息。相對于激光雷達,圖像信號在描述目標信息的完整性、寬廣性以及符合人的認知習慣等方面均具有很大優勢。
1 單目視覺障礙物測距原理
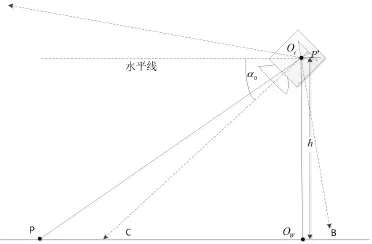
圖1 單目視覺障礙物測距原示意圖
對于單目視覺障礙物測距系統,首先建立單個攝像機與路面之間的投影成像關系,單個攝像機的側視擺放位姿及其視場如圖1所示。相對攝像機來說,路面視場范圍最大為,為了使攝像機能觀測到其前方及一定距離的路面狀況,攝像機的視場要不小于。

式中:
2 障礙物測距誤差分析

由上式可知,單目視覺障礙物測距的主要誤差因素有攝像機高度h、俯視角以及障礙物成像位置。由于在測距原理中假設世界坐標系的原點與攝像機坐標系的原點重合,而實際應用中世界坐標系的原點與攝像機坐標系原點之間存在偏差,致使攝像機高度、俯視角等參數的測量都會產生偏差。另外,圖像處理中障礙物的像素位置確定也存在偏差,這些參數的測量誤差均會引入對障礙物的測距誤差。
3 測距誤差仿真
根據單目視覺障礙物測距的原理及誤差分析,分別對主要誤差因素h、、測距誤差的影響進行仿真計算:
3.1h引入的測距誤差
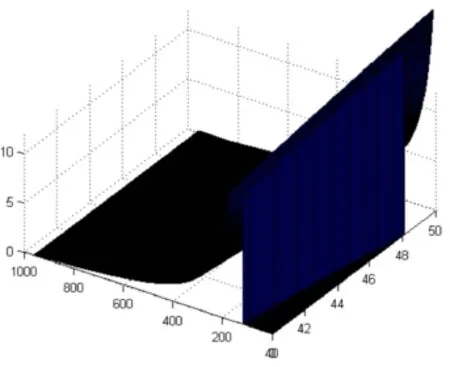
圖2 h引入的測距誤差分布
根據仿真結果可知,在俯視角和攝像機高度不變的情況下,攝像機高度引入的測距誤差隨像素位置的變化是高度非線性分布的。低位置像素對應路面較遠的位置,即越遠距離的障礙物產生的誤差越大,當像素位置在300像素以下時,測距誤差急劇增大。
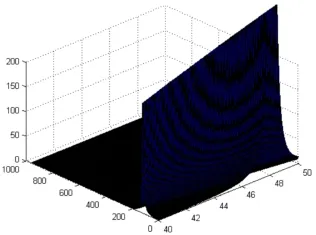
圖3 引入的測距誤差分布
根據仿真結果可知,在俯視角和攝像機高度不變的情況下,俯視角引入的測距誤差隨像素位置的變化也是高度非線性分布的。當像素位置在100像素以下,測距誤差急劇增大。

圖4 引入的測距誤差分布
根據仿真結果可知,在俯視角和攝像機高度不變的情況下,障礙物成像位置引入的測距誤差隨像素位置的變化也是非線性分布的。當像素位置在200像素以下時,測距誤差急劇增大。而且在光軸像素附近位置會產生較大的測距誤差。
這些參數不僅影響到單目視覺障礙物測距的精度,而且還決定著可視距離等性能,因此在應用單目視覺進行障礙物測距時,需要綜合考慮并設計這些參數,以便達到最優的效果。
4 結論
本文推導了一種利用單目視覺進行障礙物測距的模型,對于模型中所涉及的安裝高度、俯視角度、障礙物提取位置等測量不確定度引入的測距誤差進行了分析,以便合理地安裝布置攝像頭的位置,并且能很好地把握測量數據的準確程度。安裝高度與視距是線性關系,為了增大視距,應增加安裝高度,但由于車體的結構限制,方便安裝的位置也不會增加很多。安裝高度、俯視角度、障礙物提取位置引入的誤差是高度非線性的,應利用誤差小的分段線性區域,注意誤差較大的區域的測量數據。
[1] 王安帥.智能車輛結構化道路單目視覺導航技術[D].北京理工大學碩士論文,2008.
[2] 朱欽華. 移動機器人視覺導航技術研究[D] .廣東工業大學碩士論文,2007
[3] 王青. 基于機器視覺的車輛距離測量技術[D]. 南京理工大學碩士論文,2008.
[4] 唐高友. 基于機器視覺的道路識別與障礙物檢測技術研究[D].重慶大學碩士論文,2005.
[5]趙一兵,王榮本,李琳輝等.基于激光雷達的無人駕駛車前方障礙物檢測[J].交通與計算機,2007,2 (25):9-13
Accuracy Analysis of monocular vision obstacle ranging
Wang Zemin,Gao Junchai
(School of Electronic and Information Engineering, Xi’an Technological University,Xi’an, 710021)
In monocular vision obstacle ranging model,the relationship between the visual distance and camera downward angle,installation height of is analyzed,the factors of camera installation height,downward angle and the obstacle image position which affecting the measurement accuracy are studied,the mathematical models of error are established and simulating, errors are quantitative calculated in certain conditions.According to affecting factors of visual distance and the camera internal parameters,camera installation parameters are determined.Under the installation parameters,camera visual distance changes with obstacle image position and ranging accuracy changes with the influence factors are the simulating. The simulation results are helpful to choose the small error region,so as to improve the ranging accuracy.
monocular vision;obstacle ranging;ranging model;ranging error model
V271. 4
A
西安工業大學校長基金(XAGDXJJ1212)
王澤民(1978-)、男、漢,河北任丘人,碩士、副教授、機器視覺與檢測技術。
