無人機航空攝影測量影像數據快速處理方法
2016-09-28 09:59:07張聰聰
山西建筑 2016年25期
趙 杰 張聰聰
(1.山西省地震局,山西 太原 030021;2.山西省地震局臨汾中心地震臺,山西 臨汾 041000;3.太原大陸裂谷動力學國家野外科學觀測研究站,山西 太原 030025)
?
無人機航空攝影測量影像數據快速處理方法
趙杰1,3張聰聰2,3
(1.山西省地震局,山西 太原030021;2.山西省地震局臨汾中心地震臺,山西 臨汾041000;3.太原大陸裂谷動力學國家野外科學觀測研究站,山西 太原030025)
根據航空攝影測量影像數據處理的實踐經驗,從影像拼接、生成密集點云、構建DEM和DOM、成果導出等方面,介紹了利用Agisoft PhotoScan軟件對無人機航攝影像進行快速處理的方法,指出該方法具有高效、便捷、自動化程度高等優點,應用前景廣闊。
無人機航攝,影像處理,PhotoScan,DEM
利用無人機作為攝影平臺,搭載CCD相機作為影像數據獲取工具,形成無人機低空遙感系統是近年來航空攝影測量及遙感技術發展的熱點方向。無人機航測具有機動靈活、易用性好、成本低、效率高、低空作業獲取的影像分辨率高等特點,在應急數據獲取和小區域測繪等方面有獨特的優勢[1]。無人機飛行姿態不穩定,易受天氣、地形等的影響,其獲得的影像畸變復雜、旋偏角大,采用傳統的航空攝影測量軟件對無人機影像數據進行后期處理時作業周期太長,且對飛行控制、航線敷設、航片質量有嚴格的規定。隨著無相控航空攝影測量理論的成熟、消費級無人機的迅猛發展和價格降低,無人機獲取高分辨率影像快速制作地形圖產品得到了廣泛的重視和應用。本文以大疆無人機獲取無人機影像,介紹了利用Agisoft PhotoScan軟件對其進行自動快速拼接、生成數字正射影像(DOM)和數字高程模型(DEM)的無人機影像快速處理方法。
1 Agisoft PhotoScan簡介
Agisoft PhotoScan是由俄羅斯Agisoft公司研發的攝影測量影像處理軟件,基于計算機視覺對影像進行三維重建,由靜態影像圖片自動生成密集點云、紋理化的多邊形模型、具有地理參考信息的數字地形模型。軟件只需要導入具有一定重疊率的照片,無論是精細的工業模具還是大量的航空攝影測量影像,其都可以通過自動化的工作流程進行處理,可得到精確度高、細節豐富的結果。支持GPU加速計算和網絡分布式處理,在處理海量影像數據時可提高拼接和三維重建的效率。支持多種相機的影像數據,包括單幅相機、魚眼鏡頭相機以及球面鏡頭相機。軟件支持Python語言,可通過腳本控制作業自動化流程。
2 影像處理流程
根據Agisoft PhotoScan的特點制訂的無人機影像快速處理流程如圖1所示。
1)無人機航拍數據準備。無人機的用途和種類十分豐富,其獲取的POS數據格式有所差別,需要將不同格式的POS數據編輯為PhotoScan認可的格式,方可導入軟件中。一般來講,無人機在影像獲取作業中,自身帶有GPS和IMU構成的POS系統,可以獲得飛行過程中的WGS-84坐標以及無人機的飛行姿態等數據[2]。部分無人機的影像數據寫入了拍攝時的GPS數據,PhotoScan可從照片的EXIF信息中讀取到位置信息,此外無人機的姿態數據不是必需的,此時就不需要再次導入影像的POS數據。

2)導入并對齊影像。打開PhotoScan添加無人機影像,當航攝區域面積較大時可以分區處理,每個區域的照片數量不必太多,這樣可充分利用計算機的性能,也可提高影像處理的效率。本文中導入的大疆無人機影像數據中已經寫入了位置信息,無需導入影像POS數據。導入照片后可以設置影像的坐標參考系、相機精度、標記精度、標尺精度等。接著進行照片對齊,照片對齊的精度從低到高分為5個級別,精度越低照片的對齊速度越快。軟件利用多視圖三維重建技術可自動計算照片的位置、姿態等,可在自動過程中進行內定向、相對定向和絕對定向。
3)生成密集點云。PhotoScan可根據估算的相機位置計算出深度信息進行合并為單一的密集點云。可選擇生成的密集點云的質量,由低到高分為5個級別,質量越高處理的速度越慢,可按需選擇合適的點云質量。在災害應急航攝時,可降低點云質量以加快處理速度。可按需裁剪或刪除部分點云數據。生成密集點云后,假如最終成果需要得到多邊形三維模型,可以進一步構建網格,假如只需要獲得正射影像和DEM,則不需要這一操作。生成網格后,可通過幾何圖元編輯功能刪除不需要的面。假如無人機原始影像數據的重疊度不夠,生成的網格模型可能存在孔洞,可通過PhotoScan關閉孔洞。此外,要得到多邊形模型,還需要生成紋理。
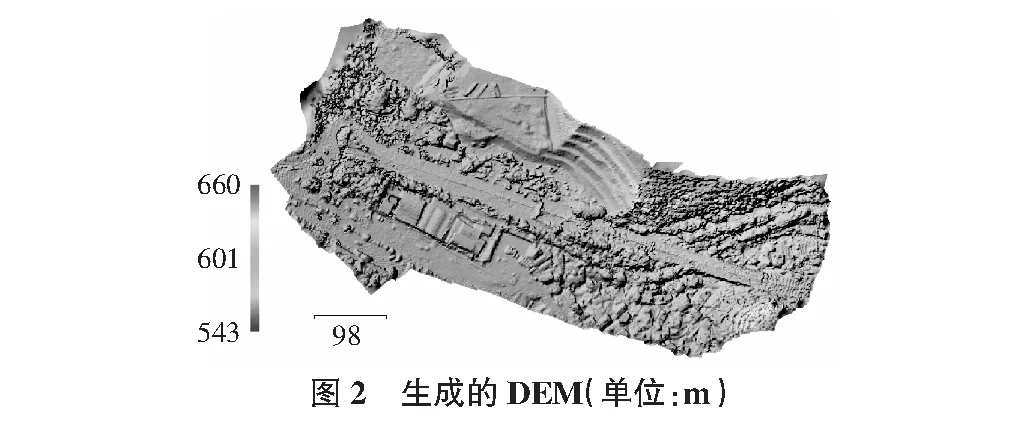
4)生成DEM。基于密集點云或者網格模型可生成數字高程模型(DEM),由于生成網格模型的步驟并不是必須的,另外為了提高DEM精度,通常選擇密集點云作為生成DEM的源數據,可設置生成DEM的分辨率。生成的DEM如圖2所示。
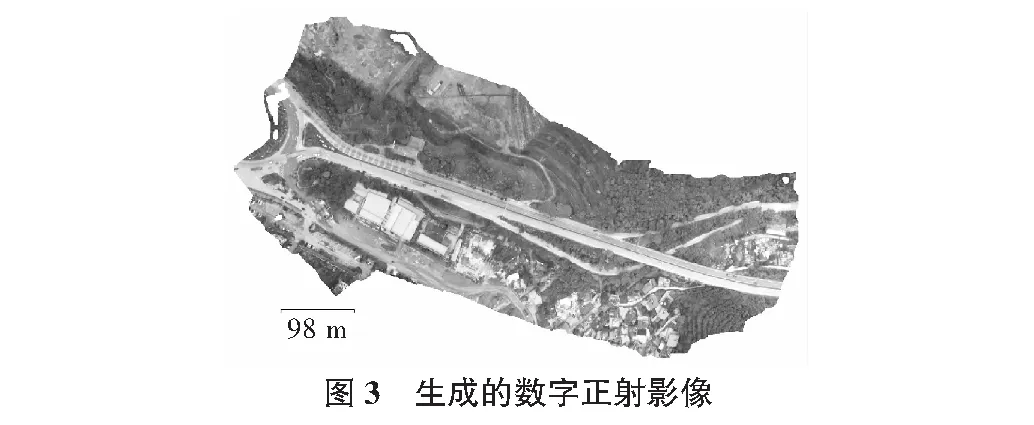
5)生成數字正射影像。通常將DEM作為數字正射影像的表面。數字正射影像的像素尺寸可根據無人機原始影像的平均分辨率來確定。根據選擇的表面區域大小和輸入的像素尺寸可計算出生成的正射影像的大小。生成的數字正射影像如圖3所示。
6)成果導出。DEM的導出可選擇其地理投影、像素大小,在DEM范圍較大時導出過程可能占用大量的系統內存,可通過分塊導出解決。可以通過繪制圖形指定為DEM的導出范圍。數字正射影像的導出設置與上述類似,可導出為JEPG,TIFF,PNG,Google KMZ,Google Map Tiles,MBTileS,World Wind Tiles等多種格式。導出為Google KMZ后可將其添加到Google Earth中查看,如圖4所示,可以看出由無人機影像生成的數字正射影像可與Google Earth中的高清衛星影像幾乎無縫重疊。

3 結語
本文以實際案例為基礎,以消費級大疆無人機為平臺獲取的影像數據為基礎資料,根據PhotoScan軟件的技術特點和對影像數據的實際需求為出發點,介紹了快速無人機影像的快速處理方法,最后快速、高效、成功得到所需的各項技術成果。結果表明,利用PhotoScan的三維場景自動建模技術進行無人機影像數據的拼接、DEM、數字正射影像、三維模型的生成具有速度快、作業過程簡潔自動化等特點。在無人機應急救援影像獲取、區域制圖上,該處理方法流程有廣闊的應用前景。
[1]吳正鵬.無人機載雙相機低空遙感系統應用初探[J].城市勘測,2011(1):76-80.
[2]朱鋒,肖暉,魏亞男,等.無人機遙感影像鑲嵌技術綜述[J].計算機工程與應用,2014(15):38-41.
The method of UAV aerial photogrammetry images data fast processing
Zhao Jie1,3Zhang Congcong2,3
(1.Earthquake Administration of Shanxi Province, Taiyuan 030021, China;2.Linfen Central Seismological Station of Earthquake Administration of Shanxi Province, Linfen 041000, China;3.State Key Observatory of Shanxi Rift System, Taiyuan 030025, China)
According to the practice and experience of the management of aerial photography and survey data processing, the paper introduces the method of UAV aerial photography fast processing by Agisoft PhotoScan. It includes images mosaicking, generating dense point cloud, building DEM & DOM, results exporting and other major steps, pointed out that the method had high efficiency, convenience, high auto mation degree and other advantages, had wide application prospect.
UAV aerial photography, image processing, PhotoScan, DEM
1009-6825(2016)25-0191-02
2016-06-24
趙杰(1989- ),男,助理工程師;張聰聰(1989- ),男,助理工程師
P232
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
