開關柜就地遙控裝置的設計與實現
2016-09-27 13:02:33立張飛周國有
中國新技術新產品 2016年15期
郭 立張 飛周國有
(1.國網鄭州供電公司,河南 鄭州 450000;2.鄭州華力信息技術有限公司,河南 鄭州 450000)
開關柜就地遙控裝置的設計與實現
郭 立1張 飛2周國有1
(1.國網鄭州供電公司,河南 鄭州 450000;2.鄭州華力信息技術有限公司,河南 鄭州 450000)
本文針對配電網現場操作存在的人身安全隱患,設計實現了就地遙控裝置,實現開關柜安全距離外的現場遙控倒閘操作,為現場操作人員的人身安全提供技術保障。遙控裝置具備自學習功能,編碼功能,現場操作簡單方便,有著廣闊的應用前景和較強的市場競爭力。
配電網;開關柜;就地遙控
0.前言
隨著國民經濟的快速發展,對電力需求的迅猛增加,城市配電網建設也日新月異,配電網架結構日益復雜。為了提高供電可靠性,實現負荷轉供,停電檢修等工作,對開關設備的倒閘操作也越來越頻繁。而現場運行操作人員由于開關設備質量等原因,在操作過程中有可能危及人身安全。
本文針對開關柜現場操作所帶來的安全隱患,設計實現了一種就地遙控裝置,操作人員可以通過遙控器在距離環網柜、開閉所開關柜安全距離以外的場所對開關柜遙控操作,并且裝置具有編碼功能,通過對開關編碼防止誤操作。
1.終端設計要求
1.1 總的要求
系統設計輸出產品適用于各種類型的開關柜成套設備,實現開關柜內斷路器或負荷開關的遙控操作功能。
1.2 功能要求
(1)系統構成分為接收控制設備和手持遙控設備。
(2)接收控制設備能夠方便地進行現場安裝固定和接線,具備多個回路的控制和位置監測(斷路器位置、接地刀)功能,具備可擴展性,可支持6路、12路、18路開關柜。
(3)接收控制設備能夠進行設定,能夠進行五防邏輯判別;能夠與手持遙控設備進行信息交互。
(4)接收控制設備預留在線升級接口,便于現場維護和升級;
(5)手持遙控設備具備按鍵輸入功能、方便攜帶和操作。
(6)操作防勿動,防交叉作業串擾,防操作抖動且分閘優先。
(7)系統設計產品符合電力行業自動化產品設備制造標準規范和電磁兼容方面相關標準。
2.整體結構設計
終端裝置采用。具體硬件構成如圖1所示。
3.硬件設計
3.1 遙控編碼
遙控編碼主要由遙控按鍵,編碼CPU和輸出通信接口3部分組成。
編碼CPU識別當前被按下的按鍵生成控制命令,并前綴加入96位唯一識別ID,形成一個完整的遙控命令幀。然后根據特定的滾動算法對遙控命令幀進行加密。完成加密后將生成的完整幀以二進制數據流的格式送入信號調制電路。
3.2 信號調制與解調
主要由調制電路和解調電路組成,遙控設備和接收終端設備中均設計。
信號調制,采用ASK數字信號調制方式,將編碼好的控制命令以二進制方式注入一定頻率的載波。然后通過發送電路發送出去。
信號解調,采用超再生接收電路,將收到的無線信號經過選頻電路選頻后,將某一頻率載波上的“0”,“1”編碼逐一解調,并送往CPU解碼。
因此來說,能夠在不同的頻率上同時建立多個(256個)信道,且互相之間不構成串擾。
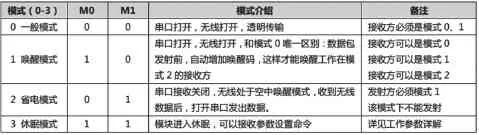
表1
3.3 遙控解碼
遙控解碼主要有通信接口,CPU組成,信號出口。
利用通信接口,CPU將解調電路輸出的二進制數據,流接收并保存。待收到完整的幀的時候,首先啟動滾動解碼算法,將加密的二進制數據流中的遙控命令解碼出來,并根據遙控命令,執行信號出口操作。
3.4 執行輸出
執行輸出主要由驅動電路和執行繼電器組成,安裝于接收終端裝置中。
CPU通過驅動電路控制執行繼電器,最終輸出跳合閘信號,最終完成受控對象(斷路器、負荷開關等)的合分閘操作。
3.5 無線收發
一是開展了農村水利發展戰略、重大課題研究。圍繞農業水價綜合改革和基層水利服務體系建設,編制了農業水價綜合改革2013年項目立項指南;指導27個省編寫了2013年度項目實施方案;總結了2008年以來全國農業水價綜合改革情況;起草了《關于大力發展農民用水合作組織的指導意見(草稿)》。堅持把農村水利重大課題研究作為重要支撐點,先后承擔了2項“十二五”國家科技支撐項目和8項水利部公益性行業科研項目的課題研究。完成了水利部重大課題“國內外農田水利建設和管理對比研究”、2012年全國灌溉水利用系數測算分析。
采用串口無線透傳模塊實現,其支持65535個地址和255個信道。
其工作方式有4種:一般模式,喚醒模式,喚醒模式,省電模式,休眠模式。通過外部引腳M0、M1來實現模式切換。模塊有4種工作模式,由引腳M0、M1設置;詳細情況見表1。
終端常規狀態為省電模式,遙控器處于喚醒模式。遙控連接失敗進入休眠模式,終端連接失敗進入0信道。通過跳頻和修改通信地址,防止交叉作業時串擾。
4.遙控過程
4.1 遙控學習
本方案采用特征碼固定方式。每個遙控器有一個固定的特征碼(設備ID),用于中斷對遙控器的學習識別。
操作方式采用終端學習的方式來進行。開放兩個獨立的信道一個用于學習(CH_Sty),一個用于操作(CH_ Act)。在學習頻道,遙控器將特征碼寫入終端,終端此時只認知該遙控,并每秒鐘被詢問一次,如果詢問中斷則,遙控器進入關閉模式。
特征碼學習流程示意圖如圖2所示。
4.2 終端運行流程
(1)常規狀態下處于0信道監聽狀態(手操器召喚信道),紅燈亮,不接受按鍵遙控的任何指令;
(2)按下終端學習按鍵,進入按鍵遙控學習模式,調到信道1;
(3)10秒鐘之內收到按鍵遙控任何數據幀,記錄當前遙控ID,并回復確認幀,進入狀態4;否則,返回狀態1;
(4)進入步驟3遙控器約定的信道和地址,至少每10秒鐘接收到一個數據幀,如果未收到返回狀態1,如果收到了,判斷數據幀。如果數據幀是聯絡詢問幀,則恢復確認幀,并保持此狀態;如果數據幀是操作幀,則進入狀態5;
(5)判斷當前操作回路是否完整,和是否具備操作條件,如具備則執行操作,操作完成后,返回執行操作確認幀,否則不執行操作,返回拒絕操作確認幀。然后回到狀態4。
4.3 遙控器運行流程
(1)設備上電,此時未建立鏈路,黃燈長亮,遙控自動進入信道1,地址為廣播。
(2)按下遙控器任意按鍵,發送遙控指令(附帶一個隨機的信道和地址協商),如果收到正確的返回幀,表明建立了鏈路,則進入狀態3。
(3)進入協商的約定信道和地址,綠燈長亮,每秒鐘發送一個鏈路詢問幀,如果收到回復,清除連接失敗記錄,并點亮綠燈,如果收不到回復則將紅燈點亮半秒鐘,綠燈熄滅,并記錄一次連接失敗,如果失敗次數超過10,則進入狀態4。
(4)連接中斷,關閉遙控無線功能,紅燈常量,等待關機。
結語
本文利用現代微處理器技術和無線通信技術設計實現了一款適用于環網柜、開關柜斷路器就地遙控操作的終端裝置。方便現場運行操作人員采用就地遙控方式進行開關操作,降低人身傷害風險,為現場操作人員的人身安全提供了技術保障。
本文中的設計方案和終端設計均已投入到了實際產品和應用當中,取得良好的運行效果。今后,根據現場運行情況和經驗,對終端進行進一步地功能優化和完善。
[1]孫錦華.現代調制與解調計數[M].西安:電子科技大學出版社,2014.
[2] ST《STM32F系列ARM內核32位高性能微控制器參考手冊V10_1》[Z].
[3] ST《STM32F103xCDE數據手冊》英文第5版[Z].
[4] ST《STM32F10xxxCortex-M3編程手冊》[Z].
TM774
A
