升降式洗浴轉運裝置的優化設計與動力仿真
2016-09-26 09:46:01關天民軒亮雷蕾高原
大連交通大學學報 2016年5期
關鍵詞:優化
關天民,軒亮,雷蕾,高原
(1.大連交通大學 機械工程學院,遼寧 大連 116028; 2.江漢大學 機電與建筑工程學院,湖北 武漢 430056)*
?
升降式洗浴轉運裝置的優化設計與動力仿真
關天民1,軒亮2,雷蕾1,高原1
(1.大連交通大學 機械工程學院,遼寧 大連 116028; 2.江漢大學 機電與建筑工程學院,湖北 武漢 430056)*
針對使用者特殊的身體狀況和護理人員性別的局限性,通過對癱瘓老人洗浴設施需求的調研,基于現有的輪式轉運擔架,提出了癱瘓老人洗澡用升降式轉運裝置的設計方案,完成三維建模,并利用ADAMS對轉運車升降機構進行工作過程仿真分析,受力計算與優化,驗證優化分析的正確性.
轉運裝置;受力分析;優化設計;動力仿真
0 引言
截止2013年底,我國60歲以上人口已達到2.02億,預計到2025年將達到3億以上,2050年將達到4.8億,約占全國總人口的三分之一.屆時,中國將成為發展中國家里人口老齡化最嚴重的國家.與此同時,高齡、服務照料、失能、空巢、貧困和精神關愛等諸多問題更為人口老齡化增加了復雜性.老年人用品產業是伴隨著老齡化社會的出現逐步興起的,其市場潛力巨大,不僅為老年人帶來了福音,還形成了新的經濟增長點,在未來會有巨大的經濟效益[1- 2].
本文基于現有的輪式轉運擔架,提出了癱瘓老人洗澡用擔架式轉運車的設計方案.利用工程計算軟件對轉運車升降機構進行受力計算與優化,完成三維建模,并對工作過程仿真分析,驗證優化分析的正確性.
1 轉運車數學模型的建立
剪叉式升降平臺是升降平臺中應用最廣泛的一種結構,相比較其他升降方式具有結構簡單、承載能力大、占地空間小、工作效率高和上升平穩等特點,故轉運車升降機構應采用剪叉結構的升降方式.大多數剪叉升降平臺采用液壓缸作為動力源,但是液壓系統復雜,不宜安裝在醫療康復設施中.現可以在市場上購買各種不同型號、推力的直線電機推桿,而且有專門為醫療康復設施而設計直線電機推桿,其推力平穩、噪音小的特點可滿足我們的醫療護理轉運擔架基本設計要求,所以采用直線電機推桿是最優選擇.
1.1直線電機推桿安裝位置的確定
如圖1所示為升平臺的幾種電機安裝的方式,圖1(a)中電機推桿的兩端均安裝在升降平臺的內、外剪叉臂上,兩端均為活動端,工作過程中直線電機推桿受力較小,但是其最低、最高位置不能滿足轉運車的設計要求;圖1(b)中直線電機推桿上端安裝在平臺上架,下端為移動端,安裝在剪叉臂上,雖然工作過程中直線電機推桿受力較小,但是最低極限位置也不能滿足轉運車的設計要求;圖1(c)中直線電機推桿下端安裝在剪叉底架,上端安裝在剪叉臂的移動端,升降高度差較大,這種安裝方式相比較前兩種更為合理.根據設計要求,轉運車應具有較大跨度的工作高度差,因此圖1(c)滿足設計要求.

(a)

(b)
(c)
1.2剪叉機構數學模型的建立
升降機構選用直線電機作為動力源,由于直線電機的推力有限,為增加轉運車的可靠性,需要對剪叉平臺工作過程中直線電機推桿進行受力分析,為選擇直線電機推桿推力值作為數據參考.
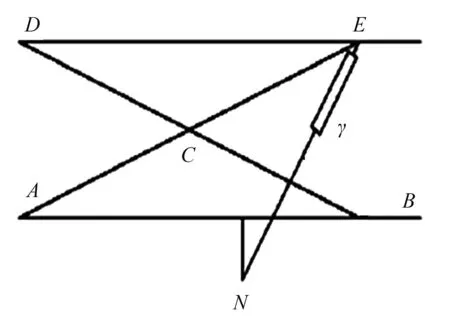
選擇直線電機的上鉸點安裝在內剪叉臂的上端,直線電機的下鉸點應安裝在下底架下方.剪叉式升降機構主要包括下底架、剪叉臂、上架和直線電機,建立直角坐標系,構建出剪叉升降平臺在上升過程中的機構運動簡圖,如圖2所示.
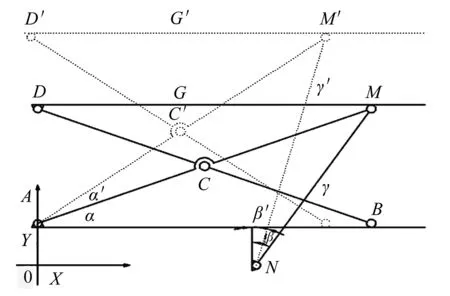
圖2 機構運動簡圖
A點為內剪叉臂與下底架的鉸點位置,D點為外剪叉臂與上支架的鉸點位置,剪叉臂AM、DB分別繞著鉸點A、D逆時針旋轉和順時針旋轉,C點為內、外剪叉臂鉸點位置,B、M為滑動端,可以左右滑動,N、M分別為直線電機推桿的下鉸點和上鉸點安裝位置,α角為剪叉臂與水平X方向的夾角,β角為直線電機推桿與垂直Y方向上的夾角.
設內外剪叉臂AM1、DB長度為L1、L2,且L1=L2,直線電機桿長為γ,L1重力為g1;L2重力為g2,剪叉上支架重力為g3,直線電機推桿桿γ重力為g4.
根據虛功原理,直線電機推桿γ在鉸點M點做的功與重力對剪叉各個部件做的功之和等于零,得出虛功方程:
(1)
其中: Fx=Fsinβ,Fy=Fcosβ.
設直線電機推桿的推力F在上鉸點M的作用力在X方向上的坐標為:
xM=L1cosα
設直線電機推桿的推力F在上鉸點M的作用力在Y方向上的坐標為:
yM=L1sinα+b
剪叉升降平臺在上升的過程中,直線電機桿鉸點M在X方向上產生的虛位移為:
dxM=-L1sinαdα
剪叉升降平臺在上升的過程中,直線電機桿鉸點M在Y方向上產生的虛位移為:
dyM=L1cosαdα
重力對各個部件做的虛功之和為:
(2)
整理得:
(3)
化簡等式,求出直線電機推桿受力的關系式:
(4)
1.3直線電機下鉸點安裝位置計算
剪叉升降平臺是四桿機構,四桿機構的優化是一個多變量的優化設計問題.由等式結果可知,直線電機推桿在所受重力一定的情況下,其鉸點受力FM的大小與α、 β角的大小有關,當剪叉升降平臺的最低、最高位置以及剪叉臂長度確定后,α角的取值范圍也隨之確定.β角的取值不但與直線電機的高度變化范圍有關,還與直線電機推桿下鉸點的安裝位置N點有關.同時,N點與M點是可以看做一根桿的兩端,所以N點與M點受力始大小相等方向相反.
(5)
為了保證直線電機推桿在剪叉平臺升降過程中鉸點所承受的力盡可能的小,同時減少電機的工作載荷,增加電機的使用壽命,需對直線電機的下鉸點安裝位置優化.建立直角坐標系,如圖3所示.
電機下端的安裝位置N點坐標可以為圖中陰影區域內任意一點,但是具體的哪一點為最佳的安裝位置,還需要進行進一步的分析.

圖3 直線電機推桿安裝區域示意圖
設直線電機推桿下鉸點的安裝位置N點的坐標系為(xa,yb).根據剪叉升降平臺的平面幾何關系列出方程:
(6)
將式(6)聯立推導出關于β角的關系式:
(7)
將式(7)帶入到式(5)中,得出FN關于坐標點(xa,yb)的關系式:
(8)
由此可見在直線電機推桿在剪叉升降平臺所受重力一定的情況下,下鉸點的受力FN的大小與T有關.
(9)
將上述推導結果寫入MATLAB程序中,繪制出T在陰影區域內的變化值,如圖4所示.

圖4 T值變化曲線
由結果可以看出,下鉸點的安裝位置FN點越接近原點的位置時T值越大,在遠離原點的對角線方向上T值越小.因此,水平方向上應盡可能的遠離原點,而在豎直方向上盡可能的向下,對應的陰影區域的坐標為(569,-110).從而優化出最佳的直線電機推桿下鉸點安裝位置.
將上述優化出的結果帶入到原有的鉸點N點受力表達式中,得到求出FN隨剪叉升降平臺上生過程中鉸點所受的力的變化曲線圖,如圖5所示.

圖5 直線電機推桿受力圖
由此可見,直線電機在推動剪叉平臺的上升的工作過車中,受力逐漸降低,在剪叉升降平臺的最低極限位置處,直線電機推桿受力最大,其最大受力為4 653 N,在剪叉升降平臺的最高極限位置處受力最小,為3 278 N.
根據優化結果確定α角、β角的變化規律,具體參數如下表1所示.
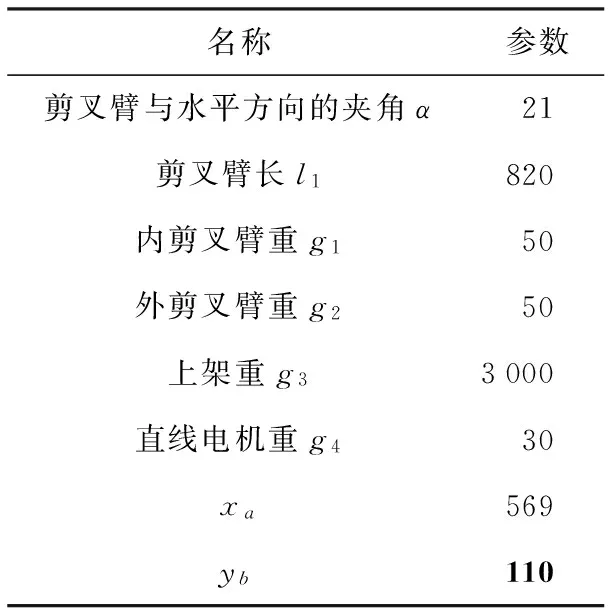
表1 剪叉式升降機構技術參數
2 轉運裝置模型的建立
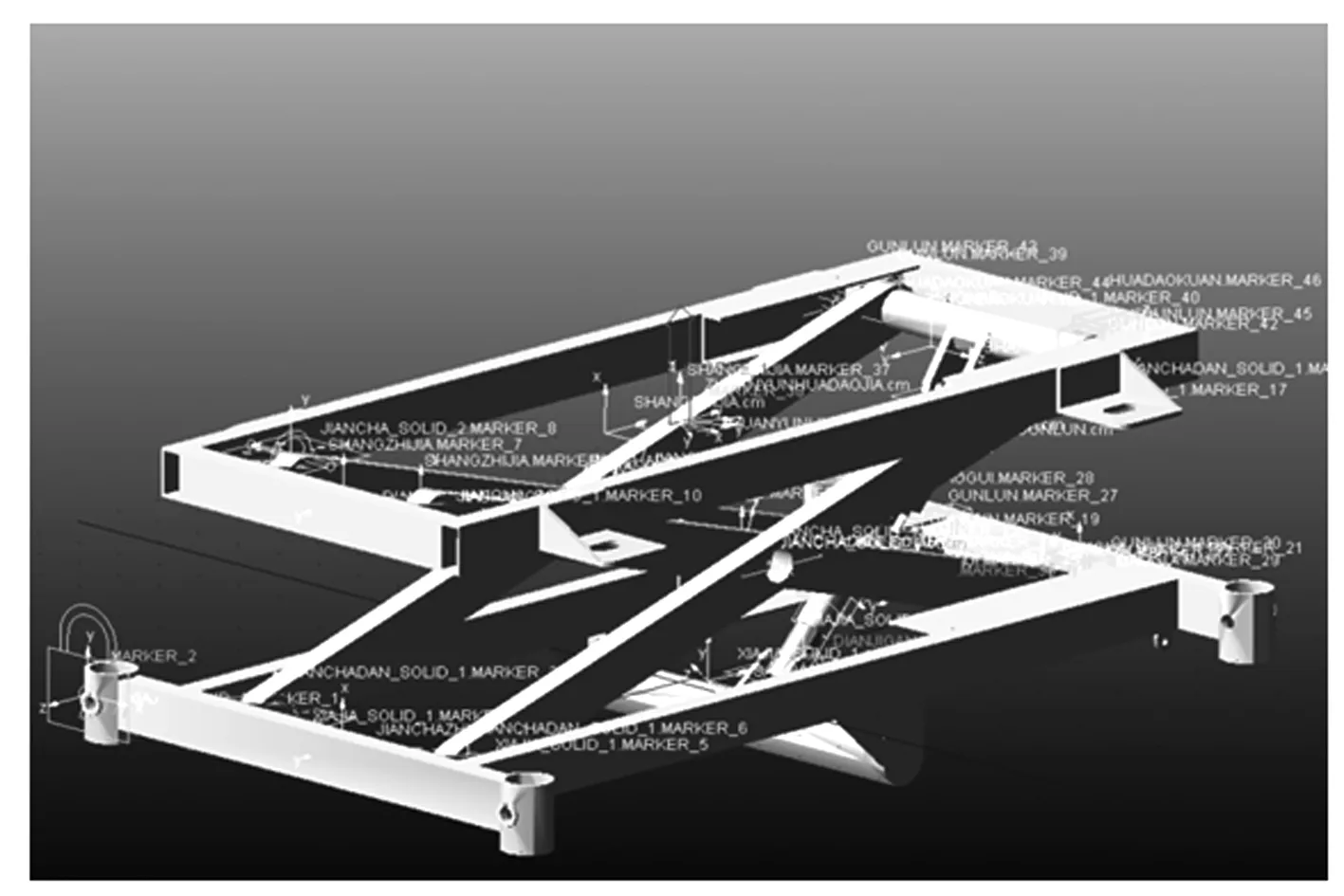
根據MATLAB軟件優化結果和轉運車的設計要求,在Pro/E中建立轉運車實體模型,如圖6所示.轉運裝置的技術參數如下表2所示.
轉運車的機構設計均左右對稱,可以根據場地的限制選擇與浴缸的對接方向.

圖6 Pro/E中轉運車模型
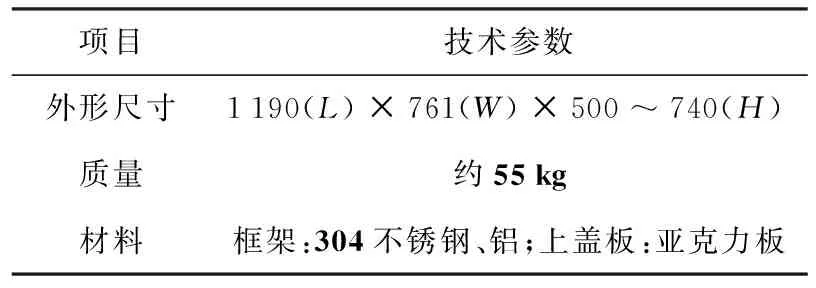
項目技術參數外形尺寸1190(L)×761(W)×500~740(H)質量約55kg材料框架:304不銹鋼、鋁;上蓋板:亞克力板
3 轉運車運動學仿真分析
通過運用ADAMS軟件對轉運車的升降運動形式進行仿真分析,驗證所確定的直線電機下鉸點安裝位置為最佳安裝位置,分析得到剪叉升降平臺上升、下降過程中速度的變化數據.
在ADAMS軟件的仿真中,需要將上述模型做相應的修改,將滾輪簡化為滑塊,并能在滑道之間滑動,將直線電機簡化為兩個套筒,分別與下支架和內剪叉臂鉸接,兩個套筒可以進行相對的滑動,實現直線電機推桿的伸縮運動.
將簡化后的模型導入到ADAMS軟件中,根據轉運車剪叉升降平臺的機構,確定各個構件的運動形式,定義各個部件的約束、驅動.在仿真模型部件的定義中需要用到旋轉副、滑移副、固定副三種運動副.如圖7所示.

圖7 剪叉仿真模型
在模擬升降平臺升降的工作狀態時,由于癱瘓老人自身的重力不大、機構上升的速度較慢且剪叉結構比較簡單,只對其上表面擔架部分施加重力載荷來模擬癱瘓老人平躺時轉運車所受重力即可滿足要求,同時對其他的部件加載載荷.將剪叉升降平臺的驅動定義在電機套筒的滑移副上,定義模型的運動時間后進行運動學仿真.
剪叉由最低位置開始逐漸升高直到直線電機推桿接近垂直的位置時停止仿真,如圖8所示.
(a)最低位置
(b)最高位置
4 剪叉升降機構驅動元件受力分析
通過對轉運車升降機構進行仿真,可以看出升降架能夠按照預先設定的運動狀態工作.接下來利用求解器對升降機構中的直線電機推桿下鉸點處進行測量,在這里系統默認的X軸坐標表示系統運行時間.為了便于ADAMS軟件的模擬仿真數據與MATLAB軟件的計算結果相比照,需要將系統默認的表示時間進程的X軸的坐標改為表示剪叉高度h在Y方向上的位移.修改后的X軸、Y軸的坐標系定義均與MATLAB的仿真曲線坐標一致,繪制出相應鉸點受力變化曲線,如圖9所示.
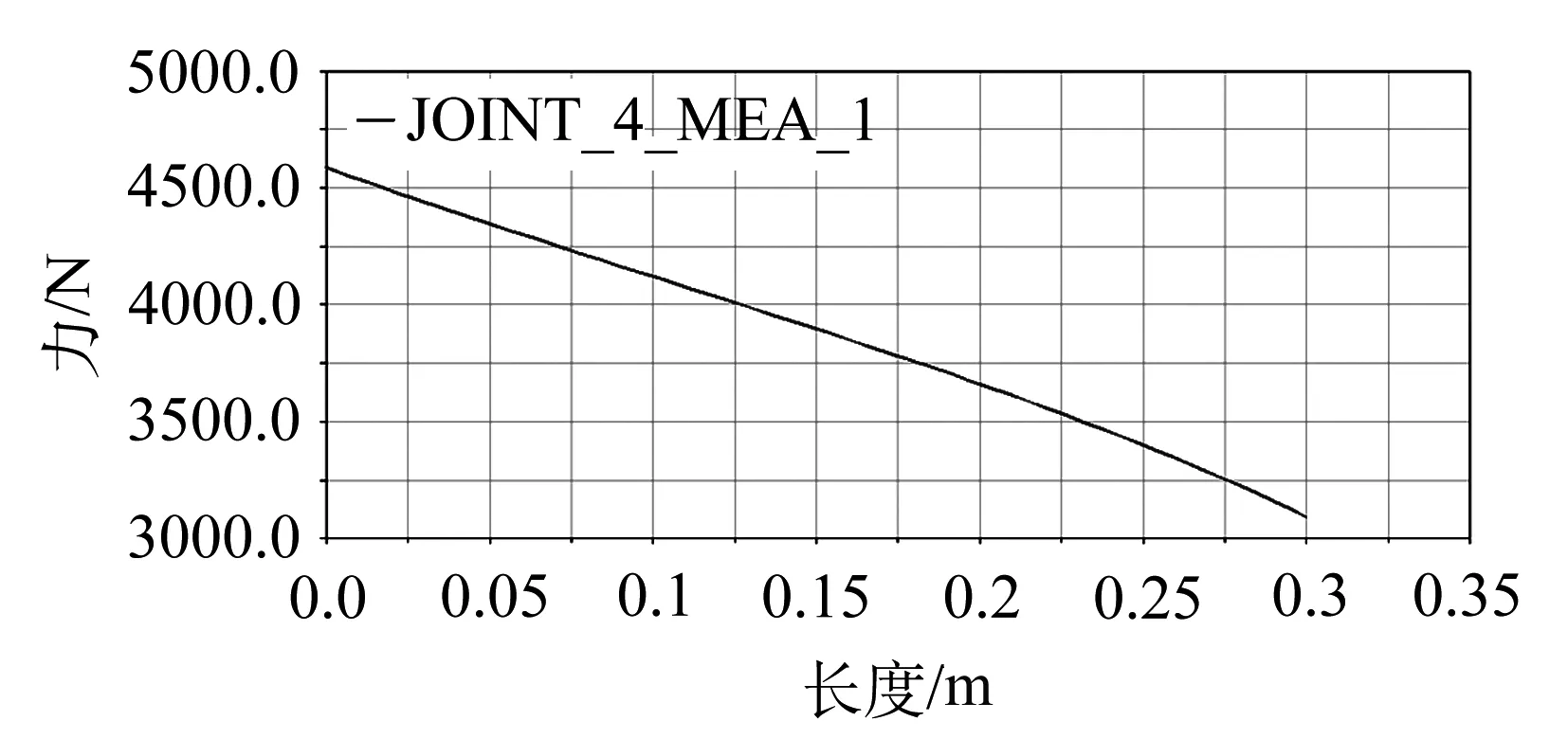
圖9 直線電機受力曲線圖
將上述曲線圖內的數據與MATLAB軟件優化出數據導入到EXCEL中分析理論計算值與仿真測量值的誤差如圖10所示.
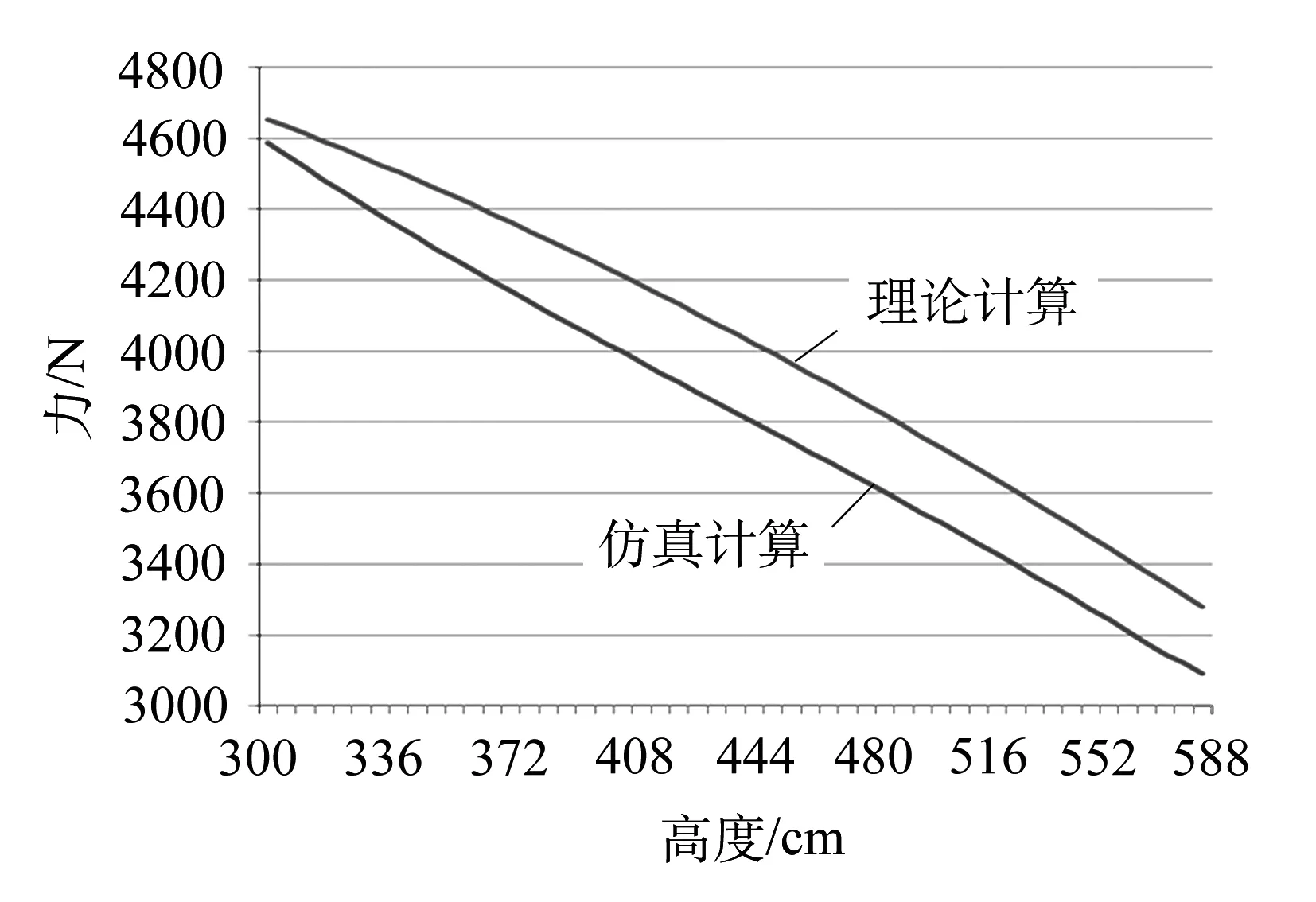
圖10 理論計算與仿真計算值對比
從圖中可以看出,兩條曲線的變化趨勢一致,數值接近,誤差較小,說明了優化設計理論的正確性和合理性.
5 剪叉升降機構工作速度分析
在轉運車的升降過程中,其速度應保持平穩,上升速度太快會造成不安全因素,且增加直線電機推桿成本,減少使用壽命,下降太快會給人造成失重不舒適的感覺.通過分析模型中剪叉升降平臺的速度以選出最合適的電機.由于直線電機桿并非直接垂直安裝在升降平臺上下支架之間,而是安裝在剪叉臂與下支架之間.所以轉運車單位時間內上升、下降的高度并非是直線電機單位時間內的伸縮速度,即可通過規定最佳的上升、下降工作時間來選擇出直線電機的工作速度,從而為選擇更加合理的電機型號作為參考.剪叉升降平臺上升過程加速度變化曲線如下圖11(a)所示,加速度恒為負值.
如圖11(b)所示,剪叉升降平臺上升速度隨平臺的上升逐漸減小.

(a)加速度變化

(b)位移變化
6 結論
本文設計了一種新型升降平臺的電機安裝方式.對剪叉升降平臺的數學模型分析,借助MATLAB軟件模擬出剪叉升降機構的升降過程,計算了重要部件的受力變化,優化設計了直線電機推桿的下鉸點安裝位置.根據優化結果和設計要求建立轉運車的三維實體模型.利用ADAMS軟件模擬剪叉升降平臺的升降過程,與MATLAB仿真結果進行對比,驗證了優化位置的合理性.
[1]李爽.新型老人用擔架式洗澡車的研究[D].大連:大連交通大學,2008.
[2]馮雨峰.養老社區建設的城鄉統籌[J].城市發展研究,2012(4):98- 104.
[3]陳志偉,董月亮.MSCADAMS多體動力學仿真基礎與實例解析[M].北京:中國水利水電出版社,2012.
[4]段慧文.剪叉機構計算與虛位移原理[M].北京:中國水利水電出版社,2012.
[5]TYCHO K,FREDERICKS,SANG D Choi,et al.Biomechanical Analyses of Paramedics Using Stairchairs[J].Human Performance Institute,2000,31(2):167- 177.
[6]李亞南.運動型自行車車架設計方法研究[D].天津:天津大學,2012.
Optimized Design and Dynamic Simulation Analysis of Elevating Bath Transporter
GUAN Tianmin1,XUAN Liang2,LEI Lei1,GAO Yuan1
(1.School of Mechanical Engineering,Dalian Jiaotong University,Dalian 116028,China; 2.School of Mechanical and Architectural Engineering,Jianghan University,Wuhan 430056,China)
According to special physical condition of elderly paralyzed patients and the fact that most nursing staffs in China are female,the elderly paralyzed patient demand for bath facilities is studied.Based on the existing wheeled transport stretcher,design scheme of raising is proposed.By using ADAMS to analyze and optimization design,the best design structure was decided,and the lift platform was modeled.The working process of the simulation analysis verifies the correctness of the optimization analysis.
transfer stretcher; stress analysis; optimization design; dynamic simulation
1673- 9590(2016)05- 0067- 06
2016- 03- 13
遼寧省科學技術計劃資助項目(2013408005);大連市科技計劃資助項目(2014A11GX043)
關天民(1963-),男,教授,博士,主要從事先進運動機構與康復機構理論與技術方面的研究
E-mail:gtm@djtu.edu.cn.
A
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
