CHZ型重力儀控制系統的數字化設計與實現
2016-09-23 08:43:19涂海波柳林濤
導航與控制 2016年4期
關鍵詞:系統
胡 明,涂海波,柳林濤,鐘 敏
(中國科學院測量與地球物理研究所,武漢430077)
CHZ型重力儀控制系統的數字化設計與實現
胡 明,涂海波,柳林濤,鐘 敏
(中國科學院測量與地球物理研究所,武漢430077)
為提高CHZ型海洋重力儀控制系統的自動化程度及抗干擾能力,提出了基于FPGA的數字化控制系統實現方案。該方案集成機械零偏補償、數據處理、系統監測與報警等功能為一體,還可靈活切換不同控制參數,滿足不同海況環境,提高了系統集成度和故障定位能力,增加了控制系統的可靠性。
CHZ海洋重力儀;控制系統;數字化設計;可靠性
0 引言
中國科學院測量與地球物理研究所自20世紀80年代起發展了一種軸對稱結構的CHZ海洋重力儀。該重力儀探頭采用軸對稱的結構設計,從原理上消除了水平擾動引起的交叉耦合效應,并采用液體阻尼使得儀器在惡劣海況時仍能正常工作,研究結果表明該儀器具有很好的發展前景[1-5]。初步研究發現,不同的海況選擇不同的控制策略可改善系統的工作性能,提高測量精度[6]。而采用模擬電路控制的傳統CHZ型重力儀進行參數調整與滯后校正的步驟較為繁瑣,且電路集成度與智能化程度較低。為此,我們采用數字伺服控制代替原有模擬控制,使其能靈活應對不同海況切換控制參數,同時結合數字濾波器壓縮比大、畸變小等優點,提高了伺服控制系統的集成度、控制靈活性及抗干擾能力。此外,數字化系統中采用DDS原理可以動態調節載波幅值的不對稱性,能補償由于機械加工工藝和安裝誤差產生的機械零偏;增加系統監測與報警功能,對重力儀中核心模塊的工作狀態進行實時監測與保護,提高海洋重力儀的可靠性。
1 CHZ重力儀控制系統
CHZ海洋重力儀控制系統的基本工作原理如圖1所示,主要可分為伺服控制系統、內外恒溫控制系統、溫度補償控制系統等子系統,詳細介紹可參見文獻[5]~文獻[7]。其中,由于待測的重力場異常是低頻信號,常常以伺服控制系統的積分反饋電流來表征所測重力異常信號,即可滿足測量精度需求;內外恒溫控制系統與溫度補償控制系統用來抑制溫度及其波動對重力儀輸出信號的影響。
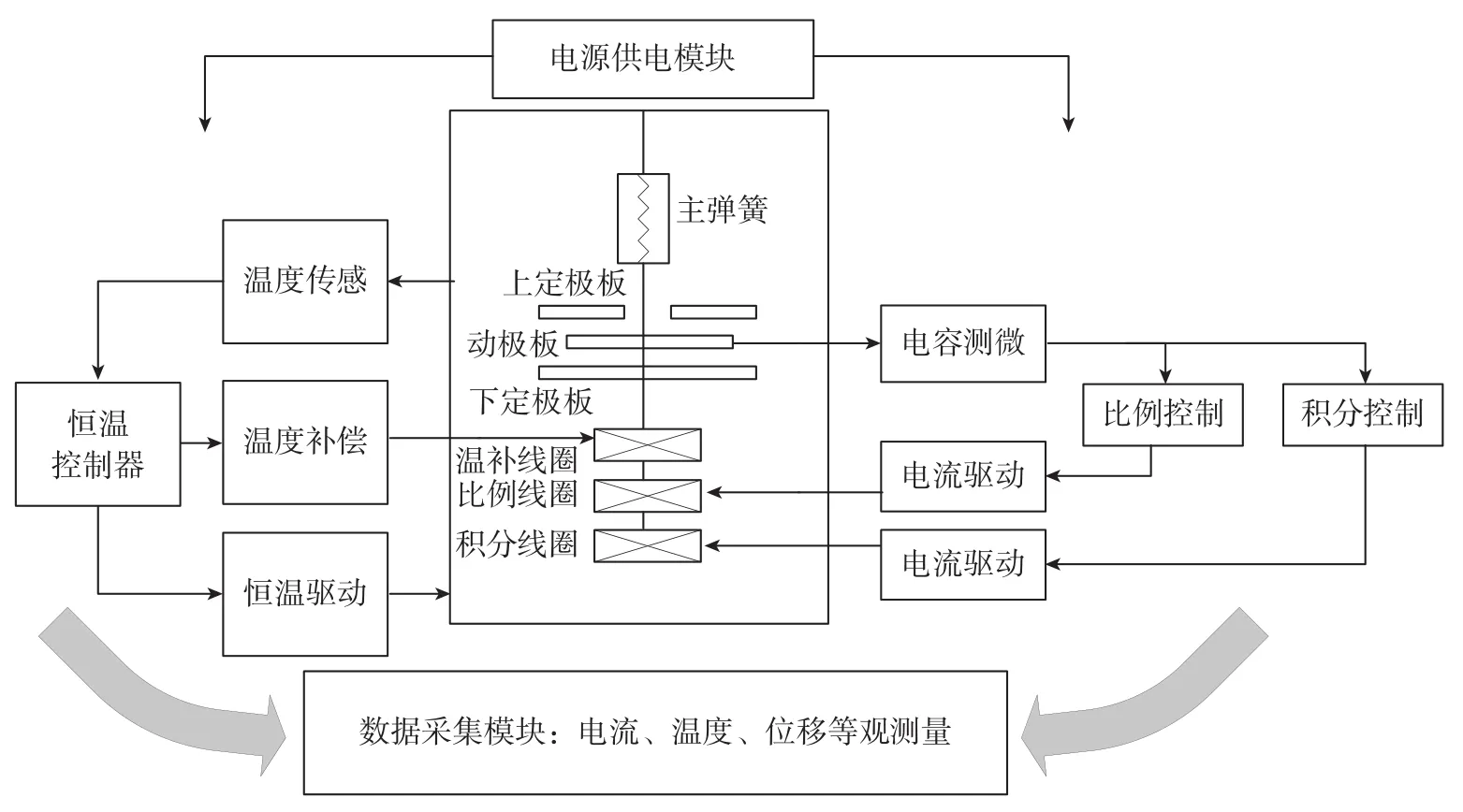
圖1 CHZ海洋重力儀控制系統工作原理圖Fig.1 Schematic diagram of the control system of the CHZ sea gravimeter
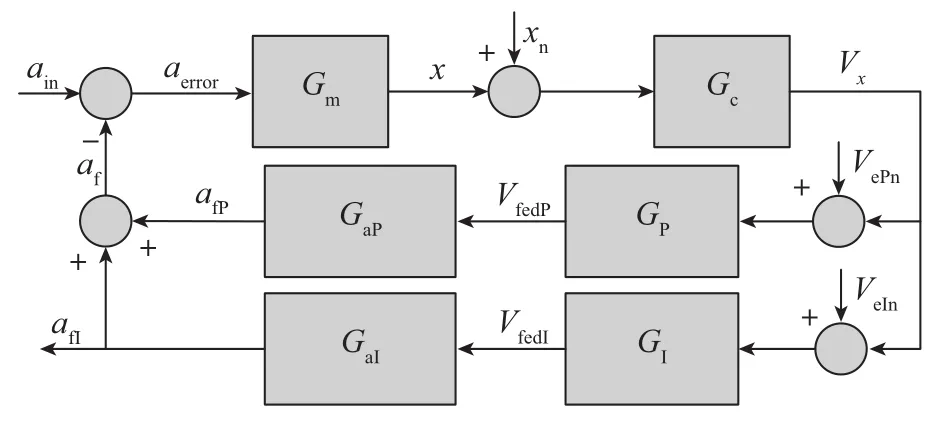
圖2 CHZ海洋重力儀模擬伺服控制原理框圖。Fig.2 Scheme diagram of analog servo-control loop for CHZ gravimeter
CHZ海洋重力儀的重力測量閉環伺服控制原理框圖如圖2所示[6],Gm表示彈性系統傳遞函數、Gc表示位移傳感器傳遞函數、GP和GI分別表示比例控制器與積分控制器傳遞函數、GaP和GaI分別表示比例線圈與積分線圈反饋執行機傳遞函數;ain為重力儀的輸入,包含待測重力異常δg與豎直海浪擾動可表示為和afI分別表示比例線圈執行機和積分線圈執行機的反饋加速度。圖2中還包含伺服控制系統的主要噪聲來源,xn為電容測微系統引入的等效位移漂移;VePn和VeIn分別表示比例控制器與積分控制器的電壓漂移。一般利用積分反饋輸出加速度afI來表征重力異常信號,可表示為:
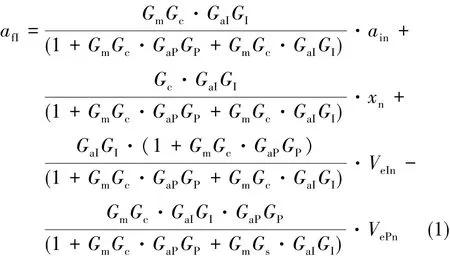
利用式(1)計算位移傳感器漂移xn、比例放大器電壓漂移VePn和積分放大器電壓漂移VeIn等引入的位置與速度穩態誤差,并總結如表1所示。選取典型參數對各項漂移的影響進行分析,這里取彈性系統的放大倍數km約為0.01μm/mGal,比例控制器和比例線圈反饋執行機靈敏度分別為GP=1和GaP=1000mGal/V,積分控制器和積分線圈反饋執行機靈敏度分別為GI=1/(42s)和GaI=700mGal/V[5-6]。若要檢測0.01mGal的重力異常,則位移傳感器的漂移需要小于0.1nm;比例放大器漂移VePn與積分放大器漂移VeIn一般在μV量級,它們引入的位置穩態誤差約為10-3mGal,其影響基本可以忽略。由表1中輸入加速度ain的速度穩態誤差表達式得出,為了快速跟蹤重力異常信息,應降低比例反饋環路的增益,提高積分反饋的響應速度,或者等效增加位移傳感電路的放大系數Gc。在較惡劣海況下,可進一步提高比例反饋系統以壓縮擺體運動幅度,但為了保證數據精度需要同時采集比例反饋信號[6]。

表1 各漂移源引入的穩態誤差Table 1 Steady-state errors from different sources
CHZ海洋重力儀要求將探頭處的溫度波動控制在0.01℃以內,這里采用兩層主動溫度控制系統來滿足該項恒溫需求。外恒溫控制系統將溫度波動穩定在約0.1℃以內,內恒溫控制系統將溫度波動穩定在0.01℃以內,而溫度補償控制環路進一步補償溫度通過主彈簧和硅油的溫度系數引起的系統誤差[3]。另外,CHZ海洋重力儀還需要有單獨的數據采集系統對重力異常、內外恒溫控制系統溫度等信號進行采集,而應用傳統的模擬控制電路來實現上述功能,系統相對較為龐雜,不利于提高其抗干擾能力與系統集成度;因此,這里提出了高集成度、多功能的數字化設計方案。
2 控制系統的數字化設計與實現
在分析CHZ重力儀控制系統需要實現功能的基礎上,對其進行數字化原理框圖設計如圖3所示,其功能主要包括:數字化伺服控制器、數字化內恒溫控制器、數字化外恒溫控制器、控制參數切換、測微電路量程切換、數據整合與處理、上位機通信、系統監測與報警等模塊。由于實現這些功能所需要的I/O端口較多,因此選用集成度高、功耗較低、開發周期短的FPGA數字集成器件,而結合高資源FPGA能同時實現大量數據高速實時處理、與上位機的實時通信、對控制系統狀態進行監測等功能,并且與普通微處理器相比能設計更高位數的控制器,提高重力儀的測量精度。下面對數字化系統中各功能模塊的設計和具體實現進行詳細描述。
2.1控制器的數字化實現
CHZ重力儀主要包括伺服控制環路、內外恒溫控制環路等,引入ADC模數轉換器將位移信息、內恒溫、外恒溫等模擬電壓信號轉換為數字信號;DAC數模轉換器將控制器輸出的數字量轉換為模擬電壓信號,然后通過電壓轉電流運算放大器,將最終得到的反饋電流分別施加于各自控制環路的比例與積分線圈、內外恒溫加熱絲中。CHZ海洋重力儀設計量程約±104mGal,分辨率指標約10-2mGal,因此在數字化過程采用等效位數大于21位的模數轉換器件即可滿足要求。重力儀中伺服控制環路與內外恒溫控制環路主要采用PI控制算法,其中比例放大的增量式數字化表達式為:
式中,kP為比例系數、Verror(k)和Verror(k-1)為當前時刻與上一時刻的傳感電壓、VfedP(k)和VfedP(k-1)為當前時刻與上一時刻的比例反饋電壓。利用后向差分法,積分控制增量式數字化表達式為:

式中,kI為積分系數、VfedI(k)和VfedI(k-1)為當前時刻與上一時刻的積分反饋電壓。
在FPGA中直接進行乘法運算會耗費大量資源,一般利用FPGA內部自帶乘法器或者采用BOOTH和DA算法來實現定點乘法運算,這將極大地減小乘法運算消耗的硬件資源[8]。合理地增加數字控制器的運算位數,既能保證FPGA內部資源滿足設計需求,也能減小計算截斷誤差對DAC輸出信號的影響。
對于恒溫控制系統而言,若采用一般PI控制器,當溫度大幅度偏離設定值時會使積分累加器容易產生溢出,此時減小積分常數或者增加積分累加器的位數能夠有效放寬積分累加器的溢出容限需求;因此,這里結合重力儀的室溫工作環境溫度可采用抗積分飽和或者積分分離控制算法來實現PI控制器的數字化。外恒溫數字化控制環路保證其溫度波動穩定在設定點的±0.1℃以內;內恒溫數字化控制環路保證其溫度波動穩定在設定點的±0.01℃以內。
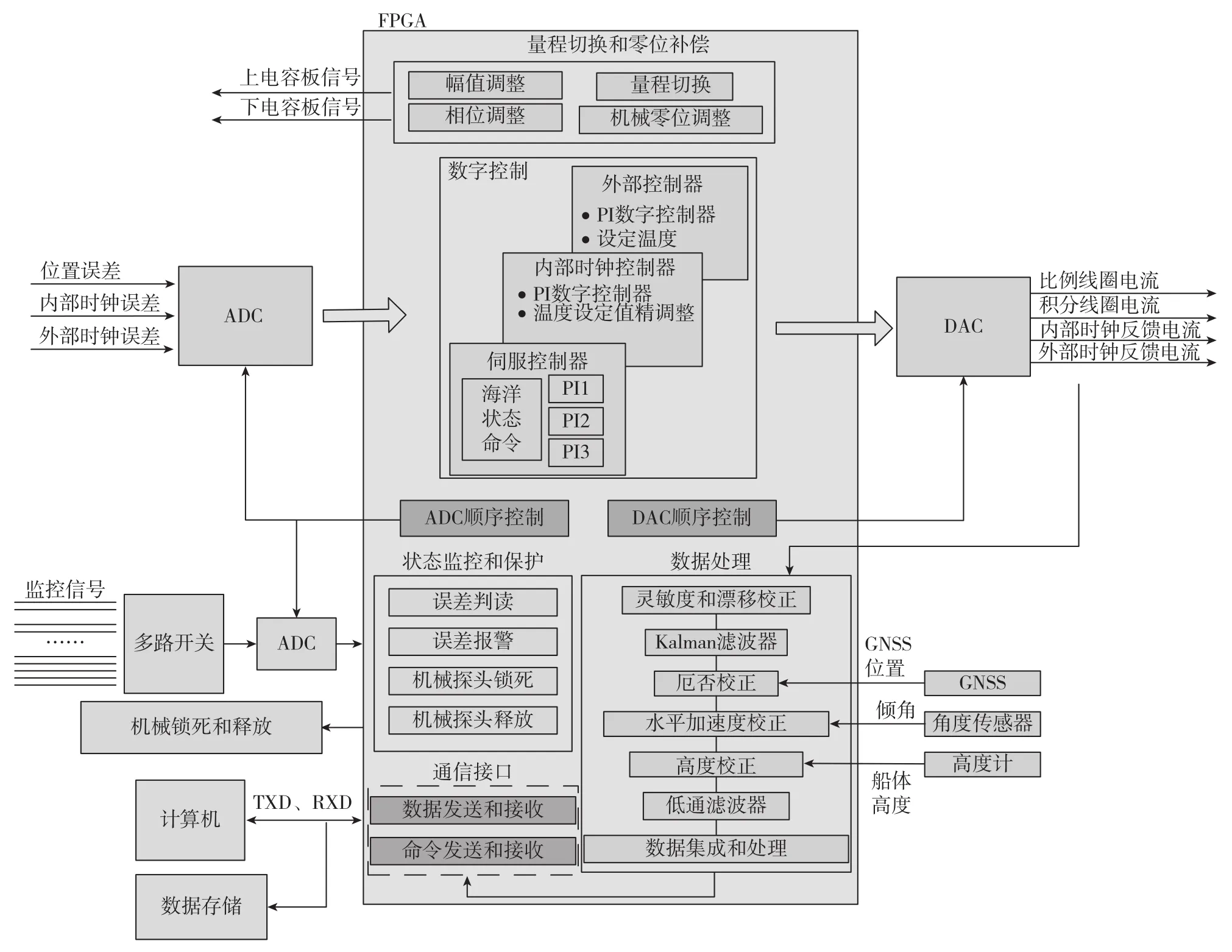
圖3 CHZ海洋重力儀數字化系統設計原理示意圖Fig.3 Schematic diagram of digital system design for CHZ sea gravimeter
對于CHZ海洋重力儀伺服控制環路而言,比例線圈反饋執行機主要用來壓縮垂直海浪擾動引起的擺位變化,積分線圈反饋執行機主要用來提取重力信號。PI控制器數字化后,能針對平靜、中等、惡劣等三種海況靈活調整伺服環路的比例與積分控制參數,且能根據實際需求適當調整內外恒溫控制系統的工作點。從豎直海浪擾動到積分反饋輸出加速度afI的傳遞函數隨比例系數kP的變化如圖4所示,能分別適應三種不同海況作業。在平靜海況作業時,直接斷開比例環節,減小彈性系統阻尼系數如圖4曲線1所示,同時增加位移傳感器的增益,這樣可以盡可能增加重力異常信號的幅值;在中等海況作業時,提高比例系數kP,增加彈性系統的阻尼,衰減垂直擾動加速度對彈性系統產生的位移,使整個海洋重力儀能夠正常工作,如圖4中曲線2所示;在惡劣海況作業時,進一步提高比例系數kP,增加彈性系統阻尼,但此時重力儀有較大滯后效應,如圖4中曲線3所示,且重力異常畸變嚴重,需要利用卡爾曼反濾波進行動態校正。

圖4 海浪擾動到積分輸出加速度afI的傳遞函數隨比例放大系數變化的曲線Fig.4 Bode diagram of transfer function from vertical wave disturbance to output integral acceleration with respect to the different proportional gain
2.2測微電路量程切換與機械零偏補償
重力儀在安靜海況作業時斷開比例環節,同時提高測微電路的靈敏度系數,該功能主要利用DDS模塊更改高頻載波信號Vp的幅值來實現。折衷考慮取測微電路的靈敏度為1.5V/μm,此時±15V輸出電壓對應的動片位移測量范圍約±10μm;受到機械加工工藝與安裝誤差的限制,動片相對定片的安裝精度只能達到約5μm,保守估計由于動片的機械零偏引入約7.5V傳感電壓偏置,在惡劣海況下機械零偏將使位移傳感器一個方向的輸出電壓飽和,并減小整個儀器的線性工作區域。數字化DDS模塊通過調整施加在上下電容極板的載波幅值對稱性能減小機械零偏對輸出線性區域的影響。
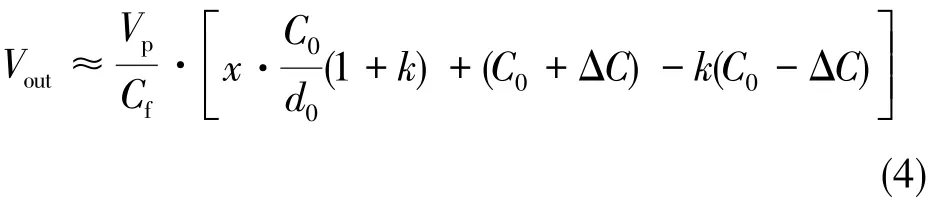
電容測微前端電路的基本原理如圖5所示,Vp為高頻調制信號,并施加在上定極板;可調整幅值不對稱性因子(-k)用來產生一個與Vp反向的高頻信號,并將其施加在下定極板,理想情況下k取1(作用在上極板與下極板的載波信號幅值相等、相位相反);C1和C2為由上下動極板與定極板形成的差分電容對;Rf和Cf為前置運算放大器的反饋電阻和反饋電容。前置運算放大器采用互阻放大模式,根據虛短原理動極板將與地等電位,此時連接動極板與前端電路的連線產生的寄生電容兩端電位相等,在該種模式下機械探頭與電路連接線對地寄生電容的影響得到了較好的抑制。

圖5 電容位移傳感器前端電路原理示意圖Fig.5 Scheme diagram of the front end electronics of the capacitive position sensor
考慮到實際誤差來源,差分電容對C1和C2會由于電容極板面積S、間距d0、介電常數ε等不對稱性而引入電容偏差;此外,上下定極板連接線長短不一致也會引入電容偏差;若假設這些因素最終產生的電容偏差為ΔC,差分電容對可以分別表示為:C1=C10+ΔC,C2=C20-ΔC,其中,C10=將電流I3=Vp·s(C1-kC2)帶入到輸出電壓的表達式中,可得:
2.3實時數據整合與處理
高精度海洋重力儀的測量結果受到水平加速度、垂直加速度、交叉耦合和E?tv?s效應等因素影響,且重力儀彈性系統強阻尼產生的滯后會導致測量信號產生異常畸變。E?tv?s效應主要與測量航跡的航向與航速有關,海浪擾動會產生垂直加速度,重力儀的不完全水平也會使其測量結果受到水平加速度的影響,CHZ海洋重力儀中交叉耦合引入的影響基本可以忽略。為提高海洋重力儀測量精度,數據處理模塊使用卡爾曼濾波器對重力異常進行校正;結合 G NSS導航輸入信號對E??tv?s效應進行改正;使用電子水平測量儀測量平臺傾角對橫向水平加速度的影響進行改正,電子測高計測量高度對其等效高度進行修正;由于海浪擾動信號周期一般小于50s,而海洋重力儀關心的重力信號周期一般大于100s,因此設計合適的低通濾波器可以較好地抑制海浪擾動的影響。
2.4上位機通信和系統監測與報警
上位機采用高性能計算機實現,數字化重力儀通過RS422接口向計算機傳輸數據并儲存到硬盤上,同時在顯示器上顯示外恒溫控制誤差、內恒溫控制誤差、GNSS數據解算得到的航速和航向信息、重力異常值等信息;計算機向重力儀發出操作命令,對其量程、控制參數、機械鎖擺與釋放等機械操作進行控制。
系統監測與報警主要包括對系統的各狀態量進行實時監測,防止重力儀長時間處于不正常的工作狀態下,降低測量效率、或在系統失控狀態下造成重力探頭損壞,其中監測狀態量主要包括:供電電源用來監測電源是否正常工作、擺體位移信息監測重力儀是否失控、重力儀傾斜角度監測穩定平臺是否正常工作等。
為了防止在重力儀搬運與十分惡劣海況作業中動極板與定極板發生劇烈碰撞,對海洋重力儀的精密機械部件進行保護,提高整個系統的自動化程度,數字化重力儀在已有基礎上增加精密自動鎖定與釋放擺體的裝置,該裝置將從機械上直接限制擺體的運動,以保護機械敏感結構。
3 結論
本文在分析CHZ海洋重力儀控制系統的基礎上,提出了CHZ海洋重力儀的數字化設計與實現方案,該數字化方案集成機械零偏補償、數據處理、系統監測與報警等功能于一體,簡化了測試步驟,且功能分區清晰,提高了系統故障定位能力;并能靈活調節控制參數適應不同海況。此處數字化開發平臺和實施思想可適用于其他系統,如航空重力儀、便攜重力儀、加速度計等慣性儀器。該開發過程一般分如下幾個步驟:
1)根據性能指標明確控制系統的最低需求,選擇合適處理器來實現系統閉環控制,如需要實現實時復雜的數據處理或者控制算法,則可選用DSP作為核心處理器;若對時序有較高要求且需要的輸入、輸出口較多,則可選用FPGA作為核心處理器。
2)對系統需要實現的功能進行分區,將其分解為相對獨立的模塊,并對核心功能模塊進行備份,提高整個系統的可靠性。
3)設計獨立的狀態監測與報警系統,對整個控制系統的工作狀態 (如電源、機械擺位、平臺傾斜角度等)進行實時監測,同時將控制系統的狀態信息動態顯示到人機友好交互界面上,這樣能準確定位故障來源,簡化儀器后期維修步驟。
[1] 張善言,李錫其,梁礎堅.新研制的CHZ海洋重力儀[J].測繪學報,1987,16(1):1-6.ZHANG Shan-yan,LI Xi-qi,LIANG Chu-jian.Newly developed CHZ sea-gravimeter[J].Acta Geodetica Et Cartographica Sinica,1987,16(1):1-6.
[2] 梁礎堅.CHZ海洋重力儀伺服系統[J].測量與地球物理集刊,1988(9):95-105. LIANG Chu-jian.CHZ seagravimeter servo system[J]. Acta Geodaetica Et Geophysica,1988(9):95-105.
[3] 范維光.零長彈簧海洋重力儀測控技術研究[D].東南大學,2003. FANWei-guang.Researchofthecontrollingand measuring technology for zero-length-based sea gravimeter [D].Southeast University,2003.
[4] Anton Graf,Reinhard Schulze.Improvements on the sea gravimeter Gss2[J].Journal of Geophysical Research,1961,66(6):1813-1821.
[5] 李宏生.海洋重力傳感器伺服回路分析與設計[J].中國慣性技術學報,2002,10(5):45-49. LI Hong-sheng.Analysis and design of the servo loop for sea gravimeter sensor[J].Journal of Chinese Inertial Technology,2002,10(5):45-49.
[6] 涂海波,胡明,董琴琴,等.CHZ型重力儀重力測量伺服回路的分頻段控制方案[J].導航與控制,2015,14 (2):41-45. TU Hai-bo,HU Ming,DONG Qin-qin,et al.Frequencypiecewise control scheme for the gravity measurement servo loop of the CHZ gravimeter[J].Navigation and Control,2015,14(2):41-45.
[7] 涂海波,何建剛,劉雷鈞,等.CHZ-II海洋重力儀重力敏感結構的性能測試與分析[J].大地測量與地球動力學,2015,35(4):711-714. TUHai-bo, HEJian-gang, LIULei-jun, etal. Performance characteristicsfortheg-sensitiveelastic structure of CHZ-II sea gravimeter[J].Journal of Geodesy and Geodynamics,2015,35(4):711-714.
[8] 楊文超.基于FPGA的PID控制器設計研究[D].江蘇大學,2006. YANG Wen-chao.Research of PID controller design based on FPGA[D].Jiangsu University,2006.
Design and Realization of the Control System Digitalization for the CHZ Sea Gravimeter
HU Ming,TU Hai-bo,LIU Lin-tao,ZHONG Min
(Institute of Geodesy and Geophysics,Chinese Academy of Sciences,Wuhan 430077)
To improve both the automatization and the capability of resisting disturbance of the control system of the CHZ sea gravimeter,a digitalization scheme employing the FPGA hardware is proposed.A series of functions such as mechanical bias compensation,instrumental data processing,system health monitoring and alarm as well as parameter adjustment to suit to different sea condition,are integrated into a single system,such that the density of integration,the capability of error location and the reliability of the whole system are improved.
CHZ sea gravimeter;control system;digitalization scheme;reliability
P716+.81
A
1674-5558(2016)01-01127
10.3969/j.issn.1674-5558.2016.04.001
2015-06-02
國家自然科學基金面上項目 (編號:41474163);國家儀器專項基金 (編號:2011YQ120045);國家重大科研裝備研制項目 (編號:ZDYZ2012-1-04)。
胡明,男,助理研究員,研究方向為慣性傳感器與無拖曳控制研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32