雙處理器智能車載終端的設計與實現
2016-09-16 09:10:42樊劉華李大全劉文怡石永亮曹翱翔中北大學電子測試技術國防重點實驗室太原0005儀器科學與動態測試教育部重點實驗室太原0005北京宇航系統研究所北京00076
電子器件 2016年4期
樊劉華,李大全,劉文怡,2*,石永亮,曹翱翔(.中北大學電子測試技術國防重點實驗室,太原0005;2.儀器科學與動態測試教育部重點實驗室,太原0005;.北京宇航系統研究所,北京00076)
雙處理器智能車載終端的設計與實現
樊劉華1,李大全3,劉文怡1,2*,石永亮1,曹翱翔1
(1.中北大學電子測試技術國防重點實驗室,太原030051;2.儀器科學與動態測試教育部重點實驗室,太原030051;3.北京宇航系統研究所,北京100076)
針對當前對車載終端擴展性和信息量的要求,結合嵌入式、CAN總線和全景拼接等關鍵技術,提出了一種新的智能車載終端的設計實現方法。采用以雙處理器Hi3520D和STM32F105V8為核心的主從板結構,關鍵硬件電路有四路視頻采集、紅外接收、CAN總線接口等模塊,軟件部分基于嵌入式Linux平臺設計。系統成功實現了四路視頻全景拼接顯示和車輛狀態信息顯示功能,滿足各項技術指標。長期測試證明,該系統穩定可靠,具有較強實用性。
智能車載終端;嵌入式;CAN總線;全景拼接
汽車數量的日益增長引發了諸多交通安全問題,智能車載終端的使用可大大降低事故發生率[1]。現今車載系統主要存在以下不足:通過主機掛載新的傳感器進行擴展的方法難以滿足現今對車載終端擴展性能的要求,其次,傳統車載終端能夠處理和呈現的數據量有限,不足以滿足用戶需求。
本系統能夠對多種車輛狀態信息進行采集和處理,所設計數據采集方法實時可靠,并可通過接口實現數據交互,使系統的通用性和擴展性能都得到了增強。同時,利用安裝在車身前后左右4個方向的廣角攝像頭同時采集車輛四周影像,經全景拼接算法處理后實時顯示所生成的全景拼接圖,給駕駛人員直觀提供了豐富的信息量,起到提前預警的作用。
1 系統總體結構設計
為使車載系統提供的輔助駕駛信息豐富有效,車載終端處理和提供的數據必須實時可靠,系統應具有較強擴展性和兼容性,整體性價比也應盡可能高[2]。車載終端的設計重點在于采集、處理并顯示車身所處環境信息和車輛狀態信息。其中車輛狀態信息十分繁復,為此選擇CAN總線進行傳輸[3]。為保證系統的實時性和可靠性,硬件系統設計采用如圖1所示的主從板結構,其中主控板主要負責處理通過串口獲取的車輛狀態信息以及采集得到的四路視頻信息,從板主要負責從CAN總線上采集車輛數據信息并進行進一步處理。
主控板選取多媒體處理芯片Hi3520D作為中央處理器,它內置Cortex-A9處理器,具有優異的編解碼算法和視頻引擎,可多路高清輸出,完全可滿足車載終端所需功能的要求。同時該芯片具有豐富的外圍接口,擴展性很強,非常適合車載系統采集處理四路視頻信息。從板部分中央處理器選取意法半導體公司的STM32F105V8,它內部集成的CAN控制器,可實時采集并處理接收到的CAN總線上豐富的車載數據信息,并且可將處理后的數據經串口傳至主控板,從而實現實時顯示。
2 系統硬件設計
所設計的智能車載終端的關鍵電路包括主控板的四路視頻采集電路、紅外接收模塊電路以及從板的CAN總線接口電路,下面就這3個電路的設計進行詳細介紹。
2.1四路視頻采集電路設計
主控板的視頻采集電路采用Richnex公司的RN6318A芯片,用于對4路攝像頭采集的模擬視頻數據進行A/D轉換和合成,所設計4路視頻采集電路如圖2所示。
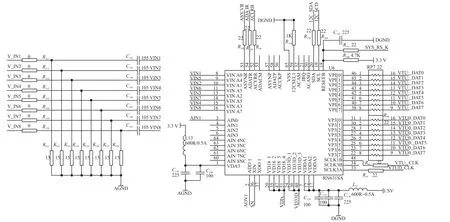
圖2 四路視頻采集電路圖
圖中VIN1~VIN8為視頻信號輸入端,根據系統需求只需接入4路攝像頭視頻,攝像頭視頻信號經過預處理后輸出至RN6318A芯片的VINA0~VINA7管腳,之后通過數字信號輸出端將經A/D轉換后生成的數字視頻信號輸出到Hi3520D進行后續全景拼接處理。
2.2紅外接收模塊電路設計
主控板中的紅外接收模塊用于對用戶的按鍵信息進行接收,Hi3520D芯片提供一個專用IR接口,紅外接收模塊電路中采用SGR3638A芯片對紅外信號進行接收[4],其輸出信號通過IR_IN引腳輸入到Hi3520D處理器進行后續解碼處理,使用戶可以通過按鍵選取想要顯示的畫面。紅外接收模塊具體電路圖如圖3所示。

圖3 紅外接收模塊電路圖
2.3CAN總線接口電路設計
從板部分選擇STM32F105V8作為處理器,它內部集成兩個CAN控制器,可實時采集CAN總線上復雜的車輛數據信息。CAN總線不具時鐘信號線,但是有兩條信號線CAN_High和CAN_Low,它們組成一對差分信號線,因此CAN以差分信號的形式進行通信。掛接在CAN總線通信網絡上的每個節點都由一個CAN控制器和一個CAN收發器構成,發送數據時,CAN控制器通過CAN_TX線把要發送的二進制編碼發送至CAN收發器,接著由CAN收發器把接收到的邏輯電平信號轉化為差分信號,通過差分信號線CAN_High和CAN_Low傳輸至CAN總線網絡,接收數據的過程與之相反[5]。
下面主要介紹CAN總線接口電路的設計,選用STM32F105V8內部的CAN1控制器作為CAN總線控制器,省去了設計獨立CAN控制器與處理器之間電路的麻煩,使系統更加簡潔可靠。選取TJA1040作為CAN總線收發器,與CAN1組成CAN總線上的一個節點,用來與其他節點進行通信。系統CAN總線接口電路圖如圖4所示。
CAN收發器TJA1040的速度可高達1Mbit/s,能夠完成CAN總線與CAN控制器間信號的差動發送和接收,在汽車領域應用很廣。TJA1040的TXD和RXD引腳分別接CAN1控制器的CAN1_TX和CAN1_RX引腳,經由TJA1040轉換的CAN1_H和CAN1_L信號通過保護電路連接至總線的CAN1_H和CAN1_L,保護電路可有效濾除總線上的電磁輻射和高頻干擾[6],保證了信號傳輸質量,增強了系統的可靠性。

圖4 CAN總線接口電路
3 系統軟件設計
本系統以嵌入式Linux為平臺,進行軟件開發,采用模塊化設計思路[7],分別對四路視頻全景顯示模塊和CAN數據接收解析模塊進行軟件程序設計。利用Hi3520D芯片視頻開發函數庫中的接口函數完成兩大模塊的軟件設計,實現了四路視頻全景顯示和車輛狀態信息顯示功能,實現方法如下:視頻采集模塊首先將采集到的視頻數據進行預處理,然后進行全景拼接顯示處理,從而實現四路視頻全景顯示功能;CAN數據信息通過串口傳輸至虛擬儀表顯示模塊并送入顯示屏,實現車輛狀態的實時顯示功能。下面對車載終端主要實現功能的軟件設計進行詳細介紹。
3.1車載終端四路視頻全景拼接顯示軟件設計
設計的4路視頻全景顯示界面由以下3部分組成:單路視頻顯示畫面、四路全景拼接圖像顯示畫面和警告畫面。系統采用標清設備DSD0輸出,顯示界面的分辨率為720×480,所設計的全景顯示界面分配如圖5所示。

圖5 四路視頻全景顯示界面
四路視頻全景拼接顯示功能實現流程圖如圖6所示。實現該功能的總體思路如下:首先完成系統的初始化工作,之后配置并啟動視頻輸入VI、視頻處理VPSS和視頻輸出VO,然后獲取四路經初步處理后的視頻數據并進行拷貝,采用查表法對此數據進行全景拼接處理后,得到單路視頻數據、四路視頻融合數據以及警告圖片數據,對用于顯示的內存區域進行對應位置的填充,之后調用接口函數HI_MPI_VO_Send-Frame()把處理后的視頻數據接入指定視頻輸出通道,完成車輛周邊環境的全景拼接顯示。

圖6 四路視頻全景拼接顯示軟件流程圖
3.2CAN數據接收解析軟件設計
CAN總線接收解析模塊主要完成了對汽車CAN總線報文的接收與解析,可實時有效地提取到車輛自身各種狀態信息。該部分應用程序的設計采用固件庫開發方式,通過調用庫函數接口配置寄存器[8]。下面介紹CAN數據的接收解析過程。
圖7為CAN數據接收解析模塊軟件流程圖,首先初始化串口和CAN接口,然后等待報文接收。采用中斷接收模式進行CAN報文接收,設置一個標志變量Flag,當完成中斷接收時Flag置1,然后根據接收報文的不同ID,軟件會調用對應的解析函數對CAN數據進行解析。舉例說明,當接收到的報文ID為0x00000288時,就會進入HandleBCM_288()函數對報文信息進行解析。根據不同函數解析后得到的報文信息,最終可以獲得我們想要得到的物理量值,如車速、發動機轉速、冷卻液溫度等車輛狀態信息,并在車載終端顯示屏上實時顯示。

圖7 CAN數據接收解析軟件流程圖
4 實測結果
本系統設計實現的四路視頻全景顯示圖如圖8所示,圖中左側上方為后路的單路原始圖像,可以幫助駕駛員獲取后路車況,左側下方為警示信息,可以提到提前預警的作用,顯示區域右側是全景拼接圖像,駕駛員可直觀獲取車輛周圍環境情況,做到無視角盲區,可有效預防安全事故的發生。

圖8 四路視頻全景圖
對從CAN總線上獲取的車輛狀態信號進行解析測試,將數據通過串口發送給處理器Hi3520D,當用戶使用紅外遙控器切換到車輛狀態信息顯示模式時,虛擬儀表顯示模塊就會按照事先規定的協議讀取串口數據,在車載終端顯示屏上實時顯示從CAN總線上獲取的數據信息。圖9為某時刻截取的車輛狀態信息顯示圖,通過虛擬儀表顯示界面我們可以直觀得到車速、轉向和發動機轉速等車輛狀態信息,可完全滿足用戶需要。

圖9 車輛狀態信息顯示圖
5 總結
本設計以嵌入式技術、CAN總線技術、全景拼接等先進技術為基礎,完成了雙處理器智能車載終端的設計,順利實現四路視頻全景顯示和車輛狀態信息顯示功能,系統所使用的數據采集和處理方式解決了當前車載系統在擴展性和信息量方面的不足。后期測試結果表明該系統運行狀況穩定,性能指標正常,在智能交通領域具有較廣闊的應用前景。
[1] 姜竹勝,湯新寧,陳軍.基于車聯網的智能車載終端研制[J].汽車電器,2012(10):39-41,44.
[2] 殷建紅.面向車聯網的車載智能終端及其實現探究[J].無線互聯科技,2013(8):31-34,52.
[3] 楊建軍.CAN總線技術在汽車中的應用[J].上海汽車,2007 (6):32-34.
[4] 何劍鋒,方方,丁仿,等.基于嵌入式ARM-Linux的紅外通信及解碼驅動設計[J].光通信技術,2011,35(4):45-48.
[5] 李平,魏長寶.CAN總線檢測系統的多接口設計研究[J].電子器件,2015,38(4):917-921.
[6] 吳志玲.基于CAN總線的數據采集節點設計與實現[D].太原:中北大學,2013.
[7] 劉青,楊勇.基于嵌入式LINUX的智能車載終端系統的設計[J].電子設計工程,2014,22(23):81-83.
[8] 劉火良,楊森.STM32庫開發實戰指南[M].北京:機械工業出版社,2013:213-234.

樊劉華(1991-),男,漢族,山西洪洞人,中北大學在讀研究生,研究方向為測試測量技術及儀器,479045083@qq.com;

劉文怡(1970-),男,漢族,山西嵐縣人,中北大學教授,研究領域為測試計量技術及儀器,2258710822@qq.com。
Design and Implementation of Intelligent Vehicle Terminal with DualProcessor
FAN Liuhua1,LI Daquan3,LIU Wenyi1,2*,SHI Yongliang1,CAO Aoxiang1
(1.North Uniυersity of China,National Defense Key Laboratory For Electronic Measurement Technology,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science&Dynamic Measurement,Ministry of Education,Taiyuan 030051,China;3.Beijing Institute ofAstronautics System Engineering,Beijing 100076,China)
For the requirements of the expansion and the amount of information to vehicle terminal nowadays,combining with the key technologies like embedded technology,CAN bus,panoramic image stitching and so on,presents a new way of design and implementation of intelligent vehicle terminal.Adopting amain-assistant framework based on dual processor Hi3520D and STM32F105V8,the key hardware circuit including video capture of four pathsmodule,infrared receivingmodule,CAN bus interfacemodule,the design of the software part is based on the embedded Linux platform.The system successfully achieved the function of four videos panorama stitching display and vehicle status information display,meet various technical specifications.Long-term tests prove that the system is reliable,ithas strong practicability.
intelligentvehicle terminal;embedded system;CAN bus;panoramic stitching
TP391
A
1005-9490(2016)04-0929-05
2015-08-30修改日期:2015-09-23
EEACC:7320,221010.3969/j.issn.1005-9490.2016.04.034
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48