基于PIR的三角交叉定位技術研究
2016-09-16 09:10:07王淑平中北大學電子測試技術國家重點實驗室太原030051中北大學儀器科學與動態(tài)測試教育部重點實驗室太原030051
電子器件 2016年4期
王淑平,楊 衛(wèi)*,侯 爽(1.中北大學電子測試技術國家重點實驗室,太原030051;2.中北大學儀器科學與動態(tài)測試教育部重點實驗室,太原030051)
基于PIR的三角交叉定位技術研究
王淑平1,2,楊衛(wèi)1,2*,侯爽1,2
(1.中北大學電子測試技術國家重點實驗室,太原030051;2.中北大學儀器科學與動態(tài)測試教育部重點實驗室,太原030051)
由于單個PIR構成的單節(jié)點探測視場存在大量的探測盲區(qū),盲區(qū)所占面積相對較大,不能對目標實施有效定位,定位誤差基本上達到1.5m~2.5m左右,基于此,提出了三角交叉定位技術研究。采用位于同一平面內(nèi)的三個節(jié)點,對同樣位于同一平面的目標進行交叉定位,經(jīng)過實驗驗證,目標定位誤差可以減小到1m以內(nèi),定位精度得到了一定程度的提高,具有一定的實際應用價值。
單節(jié)點;三角;交叉定位;定位精度
熱釋電紅外(PIR)傳感器[1-2]以非接觸形式檢測環(huán)境中紅外輻射的變化,對人體運動具有非常高的敏感度,并且具有適用范圍廣、隱蔽性強和受環(huán)境光線干擾小等優(yōu)點,因此基于PIR定位與軌跡獲取技術受到關注[3]。目標檢測與軌跡跟蹤是智能監(jiān)控、高級人/機接口、運動分析和行為理解等涉及的共性關鍵技術,在災害救助、安防以及醫(yī)療監(jiān)護等有著廣泛的應用價值[4]。基于PIR的單節(jié)點探測是對PIR的深層次應用的初步探索,然而目標的運動方向和運動路徑具有不可控特點,要求目標的運動方式符合單節(jié)點對目標定位的要求幾乎不可實現(xiàn),一旦目標通過探測區(qū)域的盲區(qū)時,單節(jié)點將不能對目標實施有效定位。在以上的技術基礎上,提出了多節(jié)點目標交叉定位技術,彌補單節(jié)點定位的不足。
1 熱釋電傳感器測距原理
將傳感器探測視場抽象為圖1所示,點O表示感知節(jié)點的一個傳感器探測單元,線段OA、OB表示由探測單元所形成的探測視場,由于所形成的探測視場的尺寸同兩視場間盲區(qū)距離相比基本可以忽略,從而在圖中用兩條線段代替兩敏感元所形成的探測視場。θ表示傳感器探測單元的探測視場角,該角由熱釋電傳感器本身的視場角和所用光學鏡片共同確定[6-10],當傳感器和光學鏡片選定后,該角度便被確定下來,為一個定值。線段OC表示需要測量的目標到探測節(jié)點的距離,在圖中用d表示。線段AB表示目標通過所在距離處盲區(qū)距離,不同距離處兩探測視區(qū)間盲區(qū)距離是確定的,在圖中用L表示。

圖1 傳感器探測視場示意圖
在圖1中,由直角△OCB中,有∠BOC=θ/2,BC= L/2,由于θ與L是已知量,在△OCB中,有

由上式可知,當L與θ確定時,目標距傳感器的距離d便能計算出來。
2 多節(jié)點探測原理
利用多節(jié)點[11-12]實現(xiàn)運動目標定位的理論推導過程建立在單節(jié)點目標定位基礎之上。在圖2(a)中,對兩個探測節(jié)點所形成的探測區(qū)域S而言,由于節(jié)點間距遠大于單個節(jié)點內(nèi)的探測單元的距離,所以節(jié)點O1、O2等效于點元。假設已經(jīng)知道O1、O2的探測結果θ1、θ2、L1、L2。如圖2(b)所示,從節(jié)點O1、O2沿θ1,θ2方向作定位線O1P、O2P,交點P就可以作為目標出現(xiàn)的位置。假設M點是真實的目標位置,可以看出,測量點P與真實目標點M之間還是有一定差距的。這個誤差主要來源于節(jié)點O1、O2的測量誤差。

圖2 兩節(jié)點目標定位示意圖
當平面內(nèi)節(jié)點數(shù)目增多,測量值P的誤差將減小。圖3展示了同一平面內(nèi)分布有3個節(jié)點O1、O2、O3時的定位圖。由于節(jié)點間距遠大于單個節(jié)點內(nèi)的探測單元的距離,所以節(jié)點等效于點元,O1、O2、O3構成三角。假設已知3個節(jié)點的3個協(xié)同定位傳感器定位結果θ1、θ2、θ3、L1、L2、L3,3條定位線L1、L2、L3的交點圍出一個三角形ABC,目標很大可能應該出現(xiàn)在三角形內(nèi)部,所以就以三角形ABC內(nèi)一點M作為目標的測量位置點。
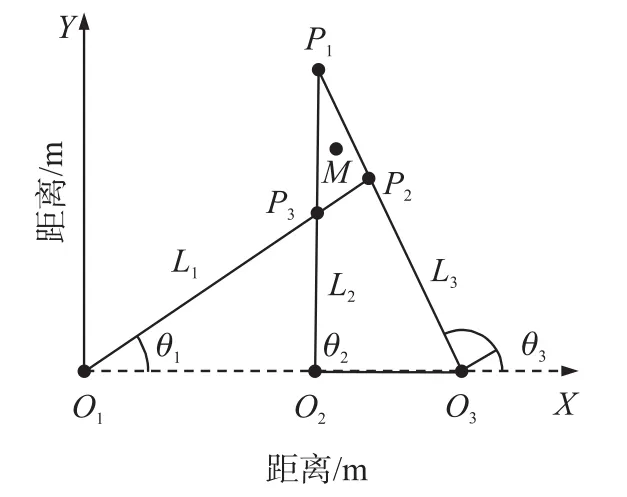
圖3 三節(jié)點目標定位示意圖
2.1三節(jié)點目標測距原理
目標位置點M的計算方法如下:
原理如圖4所示。O1、O2、O3代表3個節(jié)點,每個節(jié)點等效為一個點。在xoy坐標系中,O1、O2、O3坐標分別為(x1,y1)、(x2,y2)、(x3,y3)。

圖4 三節(jié)點目標測距原理示意圖
假定3個節(jié)點已測得方向角為θ1、θ2、θ3,那么可以得到分別通過O1、O2、O3的定位線L1、L2、L3的定位線方程為:

其中

O1、O2、O3交于點P1,P2,P3,它們坐標分別為(xp1,yp1)(xp2,yp2)(xp3,yp3),那么由以上定位線方程可以得到:

P2P3、P1P3、P1P2的中點D、E、F的坐標分別為(xD,yD)(xE,yE)(xF,yF),其中
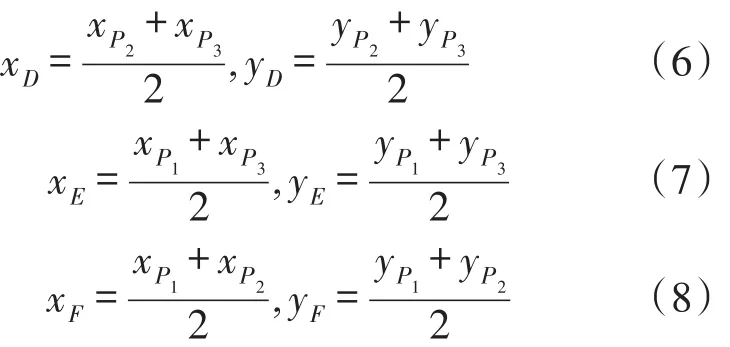
則測得目標距探測器的等效距離r1=||O1D ,r2=||O2E,r3=||O3F。假設各節(jié)點所測量的方向角的標準差分別為Δθ1、Δθ2、Δθ3,當Δθi非常小時,目標到定位線距離等效為:σi≈risin( )Δθi≈riΔθi,其中i=1,2,3。
根據(jù)Jacobi定理[13],已知3定位線交點(xp1,yp1)(xp2,yp2)(xp3,yp3),可以得到目標點 M的位置(x0,y0)為:

其中D1、D2、D3為決定性因子。
3 三角交叉定位仿真及結果分析

圖5 三角陣法實現(xiàn)目標協(xié)同定位示意圖
在圖5(a)中,虛線表示的是O1節(jié)點00方向傳感器,O2節(jié)點90°方向傳感器,O3節(jié)點180°方向傳感器各自的探測區(qū)域,點A、B、C、D、E、F為3個傳感器探測區(qū)域的交點,S即為交點A、B、C、D、E、F所構成的協(xié)同定位區(qū)域。
在圖4(b)中,利用三角陣進行目標定位仿真。假定3個節(jié)點O1、O2、O3在平面xoy內(nèi)坐標分別為(0,10)、(20,0)、(40,10)(m)。假設目標通過區(qū)域S時,3個相關傳感器均檢測到目標,3節(jié)點探測到的目標的距離分別為L1、L2、L3,方向角分別為θ1、θ2、θ3。假設目標出現(xiàn)在M點(21,9)時,3節(jié)點對目標的探測形成一個三角形區(qū)域,如圖5(b)中所示。在MATLAB平臺上,對該種情況進行定位實驗。實驗結果如表1所示。
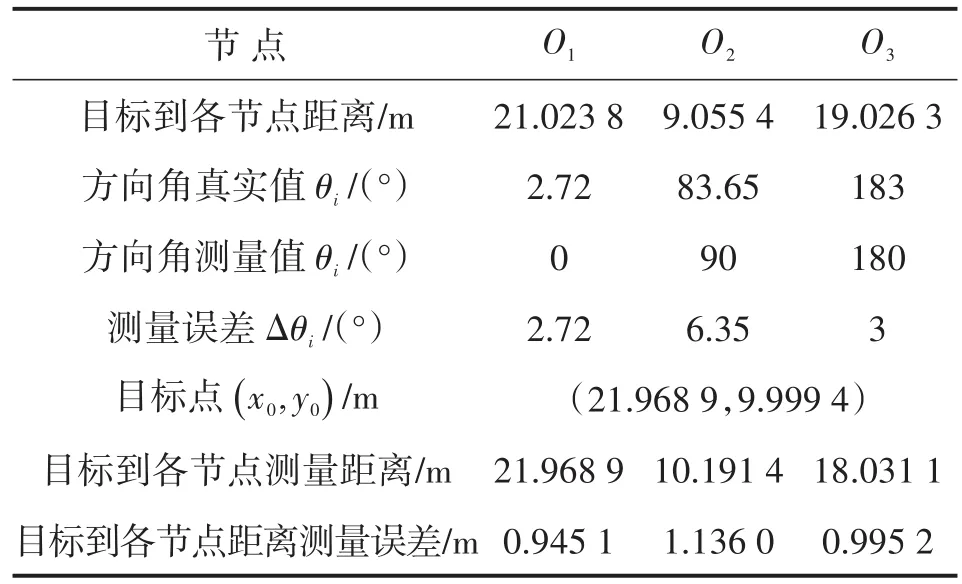
表1 利用三角陣目標協(xié)同定位實驗結果
由仿真結果可以看出,利用三角陣法定位,目標定位誤差得到降低,從單節(jié)點定位誤差1.5m~2.5m左右減小到1m左右,目標定位精度得到一定程度的提高。
4 結束語
從實驗結果可以看出,基于PIR的多節(jié)點測距定位方法提高了定位精度,使誤差縮小到1m范圍之內(nèi)。本研究從PIR原理入手,對多節(jié)點目標交叉定位技術的準確性進行了實驗驗證,拓寬了單節(jié)點PIR的使用范圍,為靜態(tài)熱釋電傳感器測距提供了一種新思路。
[1] 徐微,楊衛(wèi).一種紅外傳感器陣列探測方法的研究[J].傳感器與微系統(tǒng),2009,28(9):16-18.
[2] 申柏華,羅曉牧,王國利.運動檢測與定位的熱釋電紅外傳感新方法[J].光電子·激光,2010,21(9):1351-1353.
[3] 李博雅,李方敏,劉新華,等.基于PIR Sensor的單目標跟蹤系統(tǒng)的設計與實現(xiàn)[J].傳感技術學報,2014(9):1214-1220.
[4] 魏麗君,唐冬梅,肖遼亮.基于熱釋電紅外傳感器微弱信號處理電路的設計與分析[J].儀表技術與傳感器,2013(7):89-91.
[5] 陳鋒莉,馬海英,吳達,等.多站多目標交叉定位技術[J].火力與指揮控制,2011,36(9):85-87,92.
[6] 孫喬,楊衛(wèi),于海洋,等.動態(tài)下紅外熱釋電傳感器的目標定位方法[J].紅外與激光工程,2012,41(9):2288-2292.
[7] 楊衛(wèi),李波,孫喬,等.基于熱釋電紅外傳感技術測距的時間差法研究[J].傳感器與微系統(tǒng),2013,32(4):37-40.
[8] 李格,袁寧一,李金華.熱釋電單元探測器的電壓響應模擬[J].電子器件,2002,25(4):461-465.
[9] 吳順偉,朱麗娜,朱磊,等.基于熱釋電傳感器的位置相關算法研究[J].山東農(nóng)業(yè)大學學報(自然科學版),2006,37(3):449-452.
[10]徐克寶,高潔,鞠曉君,等.具有抗環(huán)境熱源干擾的熱釋電探測器的應用研究[J].傳感技術學報,2006,19(3):758-762.
[11]孫喬,楊衛(wèi),張文棟,等.動態(tài)熱釋電傳感器網(wǎng)絡目標跟蹤技術研究[J].光電子·激光,2013,12:2399-2403.
[12]劉前進,楊衛(wèi),趙迪,等.多PIR動態(tài)掃描下的區(qū)域目標定位方法[J].科學技術與工程,2014,14(23):205-208.
[13]范斌,馬昌鳳,范斌,等.求解非線性互補問題的一個雅可比光滑化方法[J].福建師范大學學報(自然科學版),2012,28(3):26-31.

王淑平(1990-),男,漢族,江西吉安人,中北大學儀器與電子學院碩士,主要研究方向為測試計量技術,935924529@ qq.com;

楊衛(wèi)(1957-),男,漢族,山西太原人,研高工,研究方向為微納米器件、儀器與測試技術、微系統(tǒng)及集成技術、網(wǎng)域化微武器系統(tǒng),yangwei@nuc.edu。

侯爽(1988-),女,吉林白城人,碩士研究生,主要從事傳感器信號處理方向研究,hs19880526@163.com;
Based on the Law Triangleof PIR Positioning Method
WANG Shuping1,2,YANG Wei1,2*,HOU Shuang1,2
(1.North Uniυersity of China,National Key Laboratory forElectronic Measurement Technology,Taiyuan 030051,China;2.North Uniυersity of China Key Laboratory of Instrumentation Science&Dynamic Measurement,Taiyuan 030051,China)
Due to a single PIR form of single node detection field,there are a greatnumber of blind spot detections ofblind areas.The blind area is relatively large.Itcan't implementefficiently to position on the target.The positioning error reaches about from 1.5m to 2.5m.Based on this,itputs forward the law triangle positioningmethod,uses the three nodes in the same plane and fixes the cross located on the same plane of the same goal.Through experimental verification,the target positioning error can be reduced to less than 1m to improve the positioning accuracy ofa certain leveland ithas certain actualapplication value.
single node;law triangle;cross location;positioning accuracy
TP212.9
A
1005-9490(2016)04-0825-04
2015-08-11修改日期:2015-10-28
EEACC:7320G;723010.3969/j.issn.1005-9490.2016.04.015