基于Pro/E的船舶運(yùn)動(dòng)試驗(yàn)臺(tái)運(yùn)動(dòng)仿真與控制分析
2016-09-15 02:42:30葉建華胡中望蔡佳俊
船海工程 2016年1期
黨 琪,葉建華,胡中望,蔡佳俊
(上海振華重工(集團(tuán))股份有限公司a.陸上重工設(shè)計(jì)研究院;b.科技管理部,上海,200125)
?
基于Pro/E的船舶運(yùn)動(dòng)試驗(yàn)臺(tái)運(yùn)動(dòng)仿真與控制分析
黨琪,葉建華,胡中望,蔡佳俊
(上海振華重工(集團(tuán))股份有限公司a.陸上重工設(shè)計(jì)研究院;b.科技管理部,上海,200125)
為檢驗(yàn)船載設(shè)備在海浪擾動(dòng)下工作性能,研制模擬船舶運(yùn)動(dòng)的試驗(yàn)平臺(tái),應(yīng)用Pro/ENGINEER建立試驗(yàn)平臺(tái)模型,采用骨架模型完成其三維實(shí)體裝配,再進(jìn)行運(yùn)動(dòng)仿真。通過(guò)MATLAB對(duì)控制系統(tǒng)進(jìn)行仿真分析。與用實(shí)船測(cè)試相比,認(rèn)為該平臺(tái)具有可控性,無(wú)破壞性、經(jīng)濟(jì)性等優(yōu)點(diǎn)。
船舶運(yùn)動(dòng);試驗(yàn)平臺(tái);運(yùn)動(dòng)仿真
Stewart機(jī)構(gòu)具備精度高、承載力強(qiáng)等優(yōu)點(diǎn),目前其廣泛應(yīng)用于運(yùn)動(dòng)模擬、空間飛行器對(duì)接、艦艇觀測(cè)臺(tái)等系統(tǒng)。
本文應(yīng)用Pro/E軟件建立試驗(yàn)平臺(tái)的模型,由動(dòng)平臺(tái)、定平臺(tái)和6根閥控液壓缸通過(guò)鉸鏈將他們連接起來(lái)組成船舶運(yùn)動(dòng)試驗(yàn)平臺(tái)。該平臺(tái)經(jīng)控制器實(shí)時(shí)控制,能提供6自由度的瞬時(shí)過(guò)載,完成船舶的艏搖、橫搖、縱搖、垂蕩等運(yùn)動(dòng)的模擬[1]。曾有一種4自由度的試驗(yàn)臺(tái),由水平移動(dòng)臺(tái)、垂直升降臺(tái)、旋轉(zhuǎn)臺(tái)和擺動(dòng)臺(tái)組成,其可在實(shí)驗(yàn)室條件下模擬出在不同海況下船舶及其上通訊系統(tǒng)的運(yùn)動(dòng)[2],其升降距離和擺動(dòng)角度均很有限。而本文中的船舶運(yùn)動(dòng)試驗(yàn)臺(tái)的工作空間較大,并針對(duì)特定海況,對(duì)該試驗(yàn)平臺(tái)進(jìn)行合理的軌跡規(guī)劃,使其能反映船舶實(shí)際的運(yùn)動(dòng)姿態(tài),為波浪補(bǔ)償控制器的性能檢測(cè)提供試驗(yàn)環(huán)境,還可檢查船載設(shè)備在海浪影響下的工作情況。
1 試驗(yàn)臺(tái)的位置分析及結(jié)構(gòu)
船舶運(yùn)動(dòng)試驗(yàn)平臺(tái)機(jī)構(gòu)原理見(jiàn)圖1。有學(xué)者提出一種較簡(jiǎn)單的位置正解方法[3],為方便起見(jiàn),分別在下平臺(tái)和上平臺(tái)上建立坐標(biāo)系,坐標(biāo)系坐標(biāo)系S0固連于下平臺(tái),坐標(biāo)系SN固連于上平臺(tái),從坐標(biāo)系SN到S0的變換矩陣0TN為

圖1 試驗(yàn)平臺(tái)的機(jī)構(gòu)簡(jiǎn)圖
(1)
式中:P=[x,y,z]T為ON坐標(biāo)系S0中的位置向量;矩陣R是一個(gè)3×3的方向余旋矩陣,其每一列為坐標(biāo)系SN的XN、YN、ZN軸在坐標(biāo)系S0中的方向余弦。
經(jīng)過(guò)簡(jiǎn)化,得到包含21個(gè)方程的方程組,可以寫(xiě)成下列形式:
AX=0
(2)
式中:A——21×21的矩陣,其元素為my的多項(xiàng)式;
X——21×1的列向量。
對(duì)其求解較復(fù)雜,采用計(jì)算機(jī)輔助推導(dǎo)軟件求解。
在運(yùn)動(dòng)平臺(tái)的結(jié)構(gòu)設(shè)計(jì)中工作空間分析是主要考慮因素之一。工作空間的大小決定了平臺(tái)的活動(dòng)空間。由于并聯(lián)機(jī)構(gòu)位置和姿態(tài)具有復(fù)雜的耦合性,工作空間是一個(gè)六維空間。
影響并聯(lián)機(jī)器人工作空間的因素主要有桿長(zhǎng)的限制,運(yùn)動(dòng)副轉(zhuǎn)角的限制及連桿的干涉[4]。
平臺(tái)的運(yùn)動(dòng)過(guò)程中會(huì)遇到特殊的位置,在這些位置機(jī)構(gòu)或者處于死點(diǎn)不能運(yùn)動(dòng)、或者失去穩(wěn)定,甚至自由度也發(fā)生改變、還會(huì)出現(xiàn)受力狀態(tài)變壞,損壞機(jī)構(gòu)的情況。這種位形稱為機(jī)構(gòu)的奇異位形[5]。平臺(tái)的支鏈應(yīng)適當(dāng)布置以提高其性能,如通過(guò)合理布局提高其工作空間同時(shí)減少奇異位形,結(jié)構(gòu)設(shè)計(jì)中支鏈的布置要避免結(jié)構(gòu)奇異[6]。
伺服缸為并聯(lián)平臺(tái)提供驅(qū)動(dòng)力輸入,設(shè)計(jì)伺服缸必須滿足在整個(gè)運(yùn)動(dòng)過(guò)程中能夠驅(qū)動(dòng)負(fù)載按期望的速度運(yùn)動(dòng),能滿足最大負(fù)載以內(nèi),液壓缸活塞桿的強(qiáng)度滿足要求。根據(jù)試驗(yàn)平臺(tái)對(duì)伺服缸缸行程和載荷要求,確定液壓缸的負(fù)載力及行程。閥控非對(duì)稱液壓缸,其往返特性不—致。實(shí)驗(yàn)證明,非對(duì)稱液壓缸考慮負(fù)載重力影響的情況下,應(yīng)取面積比ε=0.67,根據(jù)液壓伺服系統(tǒng)的負(fù)載匹配條件以及活塞桿的強(qiáng)度,確定液壓缸的結(jié)構(gòu)尺寸。上平臺(tái)鉸點(diǎn)分布圓半徑920 mm,下平臺(tái)鉸點(diǎn)分布圓半徑950 mm,上平臺(tái)短邊夾角15°,下平臺(tái)短邊夾角15°,各支鏈的初始長(zhǎng)度1 400 mm,中位高度1 220 mm。
2 試驗(yàn)平臺(tái)的虛擬裝配及運(yùn)動(dòng)仿真
2.1試驗(yàn)平臺(tái)的虛擬裝配
在試驗(yàn)平臺(tái)的裝配中首先要建立骨架模型[7]。骨架模型在自頂而下的設(shè)計(jì)中具有極其重要的地位,包含了用以控制全部零件的設(shè)計(jì)需求,是設(shè)備組裝的基礎(chǔ)。在Pro/ENGINEER中提供的骨架模型,對(duì)于復(fù)雜裝配是一個(gè)非常有用的功能。他允許使用者在加入零組件之前,先設(shè)計(jì)好每個(gè)零件在空間中的靜態(tài)位置,可以利用此骨架模型將每個(gè)零件裝配上去。
選擇“骨架模型”單選按鈕,保持系統(tǒng)自動(dòng)給骨架模型命的名稱,單擊“確定”按鈕,在“創(chuàng)建方法”選項(xiàng)組中保持“復(fù)制現(xiàn)有”單選按鈕,單擊該對(duì)話框的“瀏覽”按鈕,骨架模型被自動(dòng)裝配進(jìn)組件。在模型樹(shù)上右擊該骨架模型,在彈出的菜單中選擇“打開(kāi)”命令,在新窗口中打開(kāi)該文件。在當(dāng)前窗口中完成并聯(lián)平臺(tái)的骨架的設(shè)計(jì),結(jié)構(gòu)尺寸與實(shí)際完全一致。然后單擊“將元件添加到組件”按鈕,選擇首先要裝配的零件,零件出現(xiàn)在圖形窗口中。在彈出的“元件放置”對(duì)話框內(nèi),合理設(shè)置約束和連接的類型,使零件準(zhǔn)確地裝配在骨架上,同理完成其余零件的裝配。
2.2試驗(yàn)平臺(tái)的運(yùn)動(dòng)仿真
先完成試驗(yàn)平臺(tái)的各零部件的實(shí)體設(shè)計(jì),再進(jìn)行平臺(tái)的虛擬裝配,最后應(yīng)用Mechanism模塊進(jìn)行平臺(tái)的運(yùn)動(dòng)仿真。能夠生動(dòng)形象地進(jìn)行該平臺(tái)的運(yùn)動(dòng)模擬,并制作出清晰的動(dòng)畫(huà),從而了解其運(yùn)動(dòng)能力,平臺(tái)的極限位置,揭示機(jī)構(gòu)的合理運(yùn)動(dòng)方案及有效的控制算法,從而解決在試驗(yàn)平臺(tái)設(shè)計(jì)及運(yùn)動(dòng)過(guò)程中的問(wèn)題,避免了直接操作實(shí)物,可能會(huì)造成的機(jī)械故障和對(duì)設(shè)備的損壞。
根據(jù)6自由度并聯(lián)機(jī)器人的支鏈選取的系統(tǒng)方法[8],得到數(shù)種可行支鏈形式供后續(xù)優(yōu)化設(shè)計(jì)。由于6-SPS型機(jī)構(gòu)含有6個(gè)局部自由度,所以其與6-UPS型機(jī)構(gòu)的運(yùn)動(dòng)等效。下面就采用等效機(jī)構(gòu)來(lái)進(jìn)行運(yùn)動(dòng)分析,這樣可以簡(jiǎn)化運(yùn)動(dòng)副的定義步驟。建立好的運(yùn)動(dòng)模型如圖2所示。
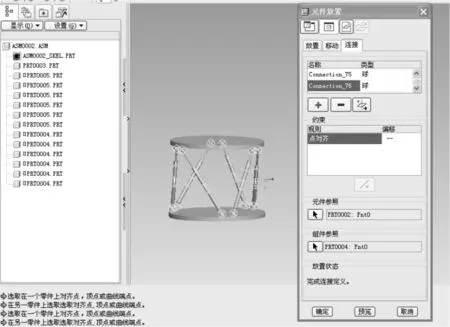
圖2 運(yùn)動(dòng)仿真過(guò)程
舉例說(shuō)明某海況下的船舶偏航運(yùn)動(dòng)的仿真過(guò)程。在主菜單中選擇“應(yīng)用程序”中的“Mechanism命令”即可進(jìn)入該模塊環(huán)境。
建立伺服電動(dòng)機(jī)能夠?yàn)闄C(jī)構(gòu)提供“動(dòng)力”,通過(guò)設(shè)置伺服電動(dòng)機(jī)可以實(shí)現(xiàn)旋轉(zhuǎn)及平移運(yùn)動(dòng),并且能以函數(shù)的方式定義運(yùn)動(dòng)輪廓。在“輪廓”選項(xiàng)卡中,可以指定伺服電動(dòng)機(jī)的位置、速度及加速度隨時(shí)間變化而變化的規(guī)律。設(shè)置界面如圖3所示。目前供了9種定義方式,這里先給第一個(gè)伺服電動(dòng)機(jī)選擇余弦方式,其方程式為

圖3 設(shè)置伺服電動(dòng)機(jī)
y=Acos(360×t/T+B)+C
(3)
根據(jù)軌跡要求合理設(shè)置振幅A、相位B、偏距C以及周期T。待模擬的航行海域的海況參數(shù)為波浪幅值A(chǔ)=1.2 m,周期T=8 s,波浪速度v=0.94 m/s,波浪加速度a=0.74 m/s2。
采用相同步驟,分別設(shè)置其余的伺服電動(dòng)機(jī),以滿足其各種運(yùn)動(dòng)的要求。這里6個(gè)電動(dòng)機(jī)均采用“余弦”方式,為使平臺(tái)能按特定軌跡而運(yùn)動(dòng),即準(zhǔn)確的模擬特定海況,那么各個(gè)電動(dòng)機(jī)的A、B、C、T這4個(gè)數(shù)值的設(shè)置就要參考由位置反解公式計(jì)算出的各缸位移。然后進(jìn)行運(yùn)動(dòng)分析,察看分析結(jié)果。回放分析結(jié)果可以播放建立的分析并輸出成為動(dòng)畫(huà)文件。播放動(dòng)畫(huà)的同時(shí)可以進(jìn)行干涉檢查、動(dòng)畫(huà)進(jìn)度表的設(shè)置,單擊“捕獲”按鈕,進(jìn)行必要的設(shè)置后即可進(jìn)行動(dòng)畫(huà)的錄制。
先在上平臺(tái)中心加上載荷,單擊“生成分析的測(cè)量結(jié)果”按鈕,在“圖形類型”選項(xiàng)里選擇“測(cè)量與時(shí)間”,單擊“創(chuàng)建新測(cè)量”按鈕,彈出如圖4所示的窗口。分別定義出要分析的各個(gè)點(diǎn)和連接軸,在“類型”選項(xiàng)里選擇“位置”,在“評(píng)估方法”選項(xiàng)里選擇“每個(gè)時(shí)間步長(zhǎng)”。
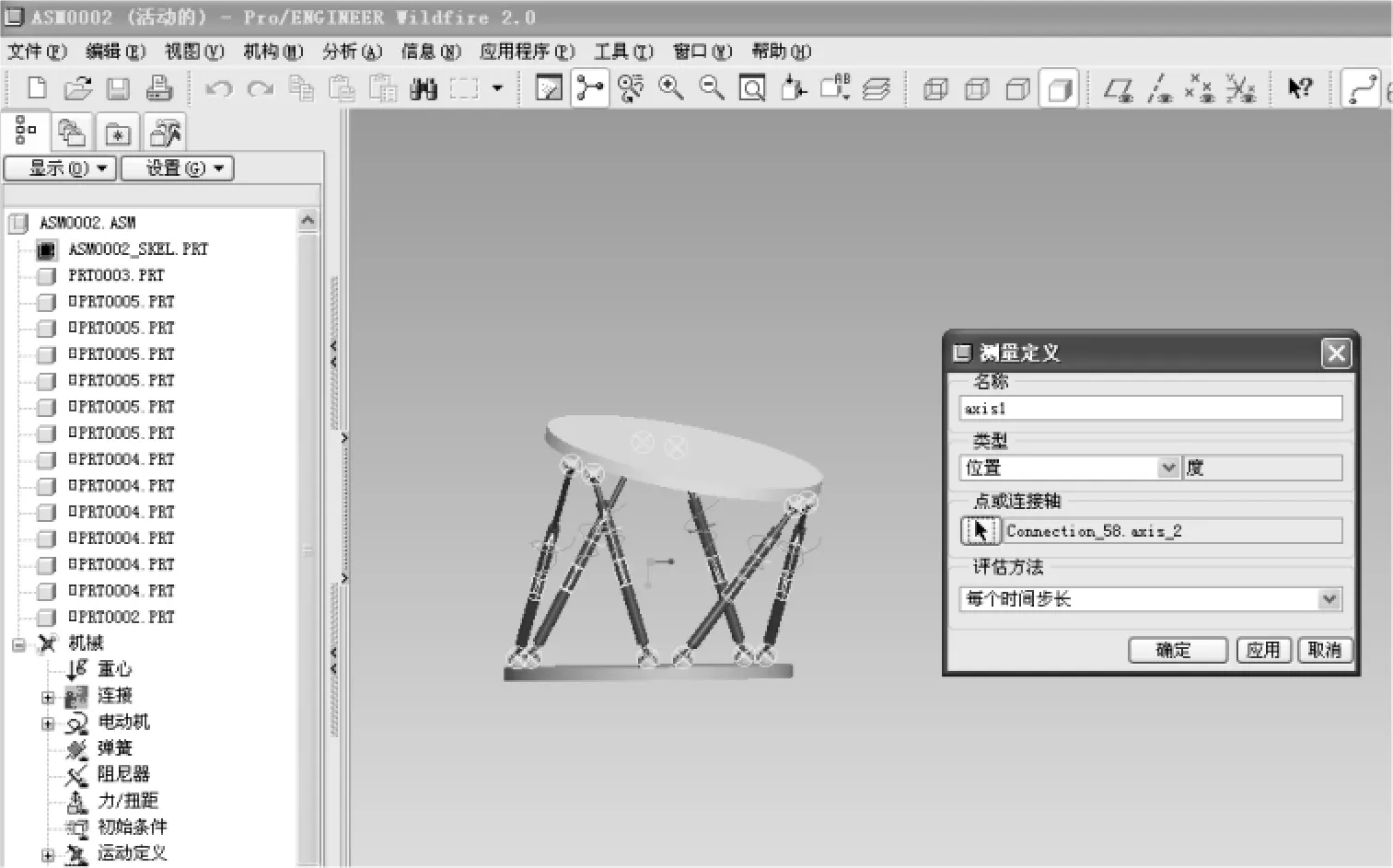
圖4 創(chuàng)建新測(cè)量
選擇好“測(cè)量”和“結(jié)果集”后,單擊“繪制所選測(cè)量的圖形”按鈕,彈出如圖5所示的測(cè)量圖形。從圖5可以看出0~20 s內(nèi)各軸運(yùn)動(dòng)較平穩(wěn),20 s后各軸開(kāi)始產(chǎn)生劇烈的振動(dòng)。

圖5 各液壓缸頂點(diǎn)隨時(shí)間的位置曲線
3 控制系統(tǒng)分析及應(yīng)用
3.1控制系統(tǒng)分析
液壓系統(tǒng)液體體積可壓縮、泄漏系數(shù)等因素的改變,使得液壓系統(tǒng)往往是非線性的。要對(duì)其線性化,用線性化傳遞函數(shù)在操作點(diǎn)附近近似表達(dá)系統(tǒng)的特性[9]。由于試驗(yàn)平臺(tái)各液壓缸的控制是互相獨(dú)立的,并且各軸線的結(jié)構(gòu)和控制系統(tǒng)是相同的,故此處僅對(duì)單軸線的液壓伺服系統(tǒng)的數(shù)學(xué)模型進(jìn)行分析,建立其控制系統(tǒng)的模型,過(guò)程如下。
1)液壓缸的傳遞函數(shù)。可通過(guò)從伺服閥輸出流量QL和液壓缸位移XP求得。
(4)
式中:ζh——阻尼比,
ωh——液壓缸固有頻率。
計(jì)算參數(shù):有效體積彈性模量700 MPa,活塞面積0.005 027 m2,流量壓力系數(shù)0.83×10-12,活塞及負(fù)載的粘性阻尼系數(shù)6×105,液壓缸的固有頻率358.47,阻尼比0.2。
2)閥的傳遞函數(shù)。
(5)
式中:ωsv——自然頻率;
ζsv——阻尼比;
Ksv——閥的流量增益。
經(jīng)過(guò)計(jì)算,傳函參數(shù)分別為:ωsv=815.2,ζsv=0.6,Ksv=9.373 2×10-5。
在MATLAB軟件中對(duì)該系統(tǒng)進(jìn)行仿真,輸入信號(hào)幅值為1、信號(hào)輸入時(shí)間為0.5 s的階躍信號(hào)。通過(guò)ZN整定方法,先使系統(tǒng)只受純比例作用,將積分時(shí)間調(diào)到最大,微分時(shí)間調(diào)到最小。再將比例增益由較小的值逐漸增大,直到系統(tǒng)出現(xiàn)等幅振蕩的臨界穩(wěn)定狀態(tài),隨后再由頻率響應(yīng)整定公式計(jì)算出比例增益、積分增益和微分增益。經(jīng)過(guò)調(diào)試得到響應(yīng)速度快、超調(diào)量較小的系統(tǒng)階躍響應(yīng),見(jiàn)圖6。

圖6 PID控制的階躍響應(yīng)
3.2試驗(yàn)平臺(tái)的應(yīng)用
該試驗(yàn)臺(tái)可用于檢驗(yàn)波浪補(bǔ)償絞車控制系統(tǒng)的性能,其步驟為:首先,在試驗(yàn)平臺(tái)上安裝好被試絞車和MRU(運(yùn)動(dòng)參考單元)。其次,給船舶運(yùn)動(dòng)試驗(yàn)平臺(tái)控制器設(shè)定好運(yùn)動(dòng)參數(shù)后,試驗(yàn)平臺(tái)就能模擬出絞車在海上起吊作業(yè)的工況,MRU檢測(cè)并反饋試驗(yàn)臺(tái)的運(yùn)動(dòng)參數(shù)給AHC(主動(dòng)波浪補(bǔ)償)控制器。最后,經(jīng)過(guò)程序計(jì)算并對(duì)絞車馬達(dá)發(fā)出控制指令,使絞車能根據(jù)運(yùn)動(dòng)平臺(tái)的運(yùn)動(dòng)而調(diào)整旋向,即運(yùn)動(dòng)平臺(tái)向上運(yùn)動(dòng)時(shí),絞車快速放繩;運(yùn)動(dòng)平臺(tái)向下運(yùn)動(dòng)時(shí),絞車快速收繩。
4 結(jié)論
該船舶運(yùn)動(dòng)試驗(yàn)平臺(tái)與其他試驗(yàn)平臺(tái)相比,具有6個(gè)自由度、結(jié)構(gòu)尺寸合理、響應(yīng)速度快,滿足模擬船舶運(yùn)動(dòng)的要求。在測(cè)試帶波浪補(bǔ)償功能的絞車時(shí),與租用工程船裝載被試絞車,到特定海域做實(shí)船試驗(yàn)相比,船舶模擬平臺(tái)不受天氣和風(fēng)浪的影響,具有較高的經(jīng)濟(jì)性,并且安全可靠。此外,該試驗(yàn)平臺(tái)還可用于檢驗(yàn)船載設(shè)備的性能及航海駕駛訓(xùn)練。
[1] 尹茜,陳紅衛(wèi).隨機(jī)海浪下船舶搖蕩的計(jì)算機(jī)仿真[J].微電子學(xué)與計(jì)算機(jī),2007,24(6):191-192.
[2] 汪亭玉,梁忠誠(chéng).船舶大氣激光通信用模擬平臺(tái)研究與實(shí)驗(yàn)[J].船海工程,2008,37(6):96-99.
[3] ZHANG C D, SONG S M. Forward position analysis of nearly general stewart platforms[J]. Spatial Mechanisms and Mechanical Systems,1992,45(12):81-84.
[4] 黃真.并聯(lián)機(jī)器人機(jī)構(gòu)學(xué)理論及控制[M].北京:機(jī)械工業(yè)出版社,1997.
[5] 黃真,趙永生,趙鐵石.高等空間機(jī)構(gòu)學(xué)[M].北京:高等教育出版社,2006.
[6] MA O. Architecture singularities of platform manipulators[A]. Proceedings of the IEEE International Conference on Robotics and Automation[C]∥Sacramento, 1991,30(5):1542-1547.
[7] 韓玉龍.Pro/ENGINEER Wildfire 組件設(shè)計(jì)與運(yùn)動(dòng)仿真[M].北京:清華大學(xué)出版社,2004:264-327.
[8] 陳峰,費(fèi)燕瓊,趙錫芳.六自由度并聯(lián)機(jī)器人的支鏈選取[J].機(jī)器人,2005,27(5):65-72.
[9] 劉俊,覃剛,王強(qiáng),等.基于AMESim-Simulink的電液伺服系統(tǒng)的控制器設(shè)計(jì)[J]. 船海工程,2015,44(1):122-125.
Motion simulation of ship's motion platform based on Pro/E and control analysis
DANG Qi, YE Jian-hua, HU Zhongwang, CAI Jia-jun
(a. Land Heavy Industry Design & Research Institute,b. Dept. of Technology Management, Shanghai ZhenHua Heavy Industries Co. Ltd., Shanghai 200125, China)
In order to test the performance of the shipboard equipment in offshore, the test platform is developed for simulating ship motions. The model of test platform is established by Pro/ENGINEER, and the platform is assembled through the skeleton model function, then the motion simulation is carried out. The control system of the platform is analyzed by MATLAB simulation. Compared with test the equipment by using real ship, the proposed test platform has advantages of controllability, no damage and economy.
ship's motion; test platform; motion simulation
10.3963/j.issn.1671-7953.2016.01.004
2015-09-21
2015-10-14
黨琪(1980-),男,碩士,工程師。
U666.16
A
1671-7953(2016)01-0019-04
研究方向:波浪補(bǔ)償及機(jī)電系統(tǒng)智能控制
E-mail:dangqi6@163.com
猜你喜歡
兒童故事畫(huà)報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2025年8期)2025-08-23 00:00:00
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生天地(A版)(2022年10期)2022-11-23 06:42:50
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
商業(yè)評(píng)論(2014年9期)2015-02-28 04:32:41