水下航行器對轉渦輪發動機輸出扭矩計算及仿真
2016-09-12 10:04:17王新平黨建軍劉成勇
水下無人系統學報 2016年4期
關鍵詞:發動機
王新平, 黨建軍, 劉成勇
(西北工業大學 航海學院, 陜西 西安, 710072)
水下航行器對轉渦輪發動機輸出扭矩計算及仿真
王新平, 黨建軍, 劉成勇
(西北工業大學 航海學院, 陜西 西安, 710072)
對轉渦輪發動機因其在效率、質量、陀螺力矩等方面所具有的優勢, 為水下航行器增大航速和航程提供了巨大動力。文中提出了一種水下航行器發動機利用對轉渦輪進行工作的新方法。通過分析對轉渦輪發動機結構特點, 給出了水下航行器發動機在利用對轉渦輪情況下一級渦輪和二級渦輪有效輸出扭矩的理論推導; 定義了三速制工況模式, 以中間工況設計噴嘴和一級渦輪參數, 以高工況設計二級渦輪參數; 建立了對轉渦輪發動機的仿真模型, 進行了3種工況模式的流場仿真。通過對理論計算值和相關仿真結果進行對比發現, 水下航行器使用對轉渦輪代替常規渦輪, 可以大幅減小余速損失, 提高渦輪發動機效率, 證實文中提出的方法正確且可行。
水下航行器; 對轉渦輪; 發動機; 輸出轉矩
0 引言
當今, 先進的對轉渦輪技術已成為渦輪機發展的關鍵技術之一[1]。在水下航行器領域, 該技術可為提高系統輸出功率提供新的解決途徑[2]。傳統水下渦輪機一般為單級或多級部分進氣沖動式渦輪機[3-4]。單級渦輪機余速損失較大。傳統多級渦輪機雖能減少余速損失, 但由于多個動葉柵的轉向相同, 使其在陀螺力矩方面存在劣勢。在水下渦輪機的研究中, 蔣彬等[5-6]用 CFD方法模擬氣體在噴嘴和葉片中的流動過程, 并對單級渦輪的參數設計進行了改進。對轉渦輪在航空航天領域的應用顯示出其多方面優越性及應用形式的多樣化[7]。采用的形式主要有 1+1/2對轉渦輪、1+1對轉渦輪和 1+1/2+N對轉渦輪, 輸出方式有單軸、雙軸和多軸, 渦輪發動機主要采用反力式渦輪。周楊等[8]從理論上研究了對轉渦輪基元速度三角形參數的優化選取方法, 并給出高壓渦輪導葉、動葉出口氣流角等變化對效率影響的詳細變化關系。趙慶軍等[9]對某對轉渦輪的流場進行了仿真, 揭示了1+1/2(無低壓導葉)對轉渦輪流場的分布規律。雖然對轉渦輪在不同領域所發揮的作用不盡相同, 但在效率、質量、陀螺力矩等方面具有很大優勢, 可成為21世紀水下航行器的動力主機, 為水下航行器增大航速和航程提供了巨大的動力。
文中提出一種新型水下航行器對轉渦輪發動機技術, 通過對發動機流體動力的仿真分析, 進一步驗證了該技術的優越性和可行性。
1 水下對轉渦輪發動機構型
文中提出的對轉渦輪機設計思想: 采用2個渦輪盤通過氣動耦合實現對轉, 但轉速不成固定比例, 一級渦輪(主渦輪)僅拖動推進器, 二級渦輪(輔渦輪)僅拖動輔機。在一級渦輪后面增加一級反向渦輪, 充分利用前級渦輪出口燃氣所攜帶的動能, 可大幅減小余速損失, 提高渦輪發動機效率。
水下航行器對轉渦輪發動機結構如圖1所示,其由2個結構相同的工作葉輪及1組噴嘴組成。燃燒室產生的高溫、高壓氣體通過噴嘴, 工質內能轉變為氣流的動能。該超音速氣流以一定角度噴入第 1級渦輪, 推動渦輪盤轉動并輸出軸功。氣流通過第1級渦輪后, 速度降低、方向改變, 再噴入第2級渦輪, 推動第2級渦輪盤轉動并輸出軸功。第1級渦輪盤與第2級渦輪盤的旋轉方向相反。工質氣體做功后的廢氣經推進軸內孔排出航行器。

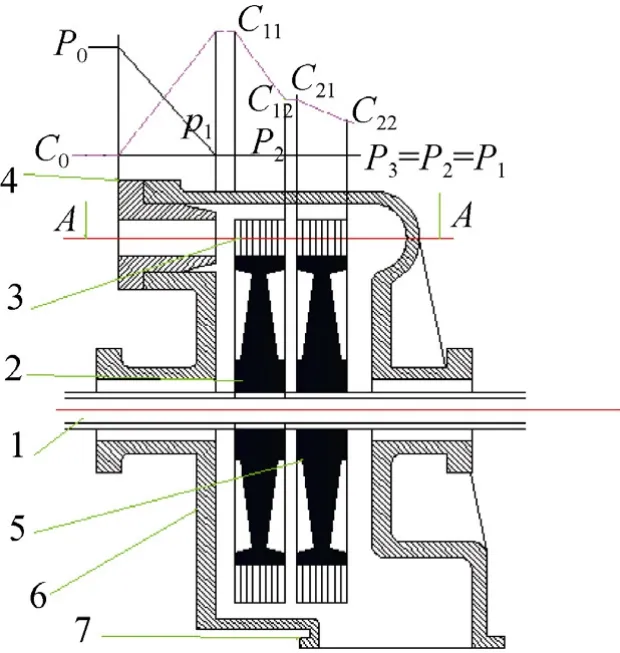
圖1 沖動式對轉渦輪發動機剖面示意圖Fig. 1 Sectional schematic of impulse counter-rotating turbine engine
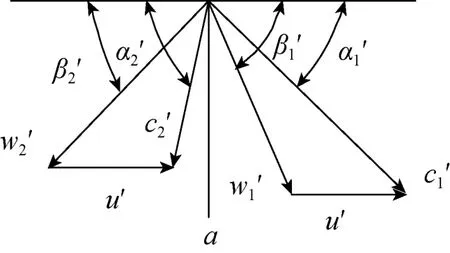
圖2 二級渦輪的速度三角形Fig. 2 Velocity triangle of secondary turbine
1.2 有效輸出轉矩模型
對轉渦輪發動機一級渦輪有效輸出轉矩[5]


系數; φ′為二級渦輪工作葉片速度因數。
本研究對2016年1月1日—2017年12月31日于哈爾濱醫科大學附屬腫瘤醫院腔鏡科使用超細鼻胃鏡的患者進行回顧性分析,共計160例,年齡36~91歲,男性136例,女性24例,平均年齡分別為61.54±10.34歲和61.38±10.00歲,包含門診與住院患者,患者均一般狀態尚可,在清醒狀態下完成內鏡下診療,無術后并發癥。病變狹窄類型主要為消化道癌癥、術后吻合口良性與復發性狹窄、外壓性狹窄及不明原因性狹窄等,所有患者均因標準胃腸鏡無法通過狹窄處而使用超細鼻胃鏡。電子內鏡均為奧林巴斯生產,標準胃鏡的外徑≤9.8 mm,標準腸鏡的外徑≤12.9 mm,而鼻胃鏡的外徑≤5.8 mm(表1)。
2 數值計算模型
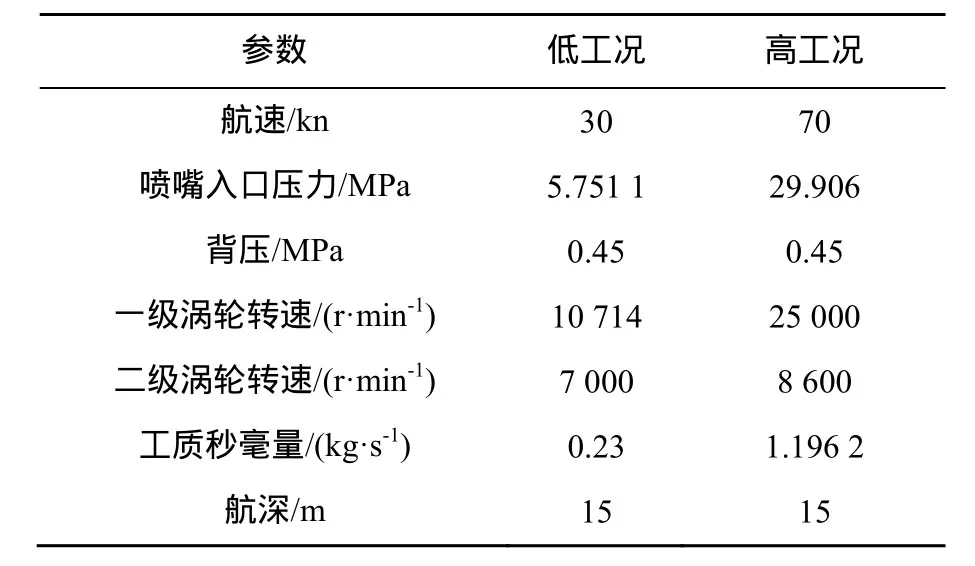
表1 工況參數Table 1 Parameters for different working conditions
建立對轉渦輪發動機實體模型, 建模并導出Parasolid格式文件作為 Fluent軟件前處理器Gambit的輸入模型。動力系統通流部分包括噴嘴、一級渦輪葉片流道、二級渦輪葉片流道以及噴嘴與一級渦輪的連接段, 其中 4個噴嘴布在噴嘴環上。由于葉輪旋轉區域的存在, 可將整個計算區域劃分為3個靜止計算子域和2個旋向相反的旋轉計算子域。計算模型劃分如圖3所示。
整個計算域網格均采用六面體結構化網格,其中渦輪葉片流道部分采用Map類型網格, 而斜切噴嘴、連接段以及渦輪出口部分則采用Cooper類型網格, 共計網格數 280萬。為了準確地描述渦輪葉片流道及噴嘴內的燃氣流動細節, 對靠近壁面區域進行了局部加密。
圖3 對轉渦輪發動機計算域Fig. 3 Computational domain of Conter-rotating turbine engine
3 對轉渦輪發動機仿真
當監控的一級渦輪、二級渦輪的輸出轉矩趨向穩定不變時, 認為計算已經達到收斂條件, 輸出相關仿真結果[10]。高速氣流由噴嘴進入葉輪時,每個噴嘴對應約為4~5個葉片, 其流道由橢圓形流道變化為圓周流道, 通流部分形狀發生了突變,氣流的速度和方向都會有所變化。
3.1 流場仿真計算
噴嘴壓力比等于設計值, 圖4和圖5分別為中間工況時對轉渦輪壓力分布云圖和對轉渦輪速度分布云圖。不帶斜切部分區域的噴嘴壓強和馬赫數變化很規律, 斜切口使氣流參數變化層增多,流動更復雜, 斜切部分壓強和馬赫數都有變化,出現局部壓強變小馬赫數變大, 但變化范圍和幅度不大; 從斜切噴嘴出來的氣流經過一級渦輪、二級渦輪, 氣體的壓強越來越小, 直至接近背壓,氣體的速度也越來越小, 在一級渦輪、二級渦輪流道中, 靠近葉背的氣體壓力低、速度低, 靠近葉凹氣體壓力高、速度高。

圖4 中間工況對轉渦輪壓力分布云圖(Pa)Fig. 4 Pressure distribution contour of counterrotating turbine in medium velocity mode
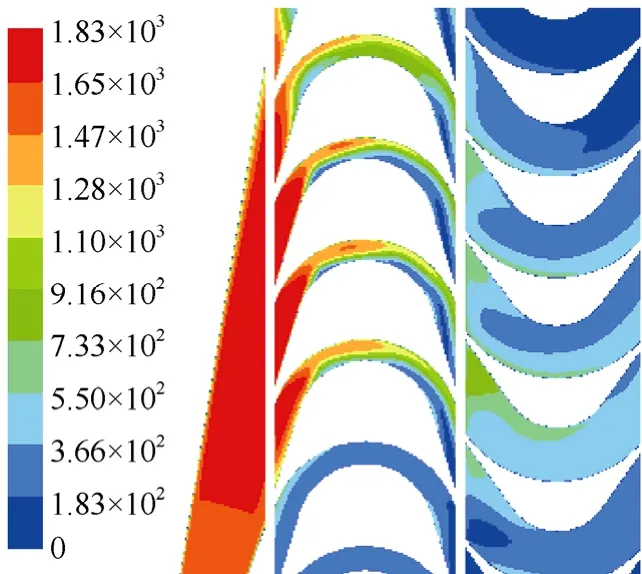
圖5 中間工況對轉渦輪速度分布云圖(m/s)Fig. 5 Velocity distribution contour of counterrotating turbine in medium velocity mode

噴嘴壓力比大于設計值, 噴嘴有效出口截面超音速氣流的壓強小于外界壓強, 氣流在出口處將產生激波, 如圖6為低工況時對轉渦輪速度分布云圖。激波存在于斜切口延伸段內的圓形區域,在此區域里氣體壓強上升, 氣流通過激波, 邊界層變厚, 馬赫數降低; 從斜切噴嘴出來的氣流經過一級渦輪、二級渦輪, 氣體參數的變化趨勢與中間工況基本一致, 由于激波的影響, 下面 2個流道中葉背與葉凹的氣體參數變化不明顯。
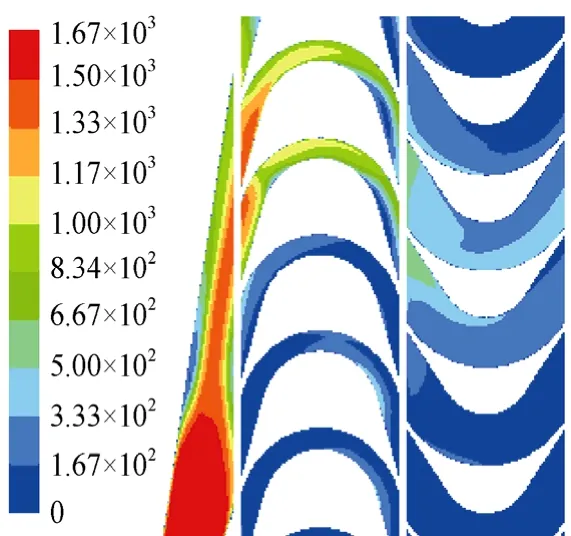
圖6 低工況對轉渦輪速度分布云圖(m/s)Fig. 6 Velocity distribution contour of counterrotating turbine in low velocity mode
噴嘴壓力比小于設計值, 噴嘴有效出口截面超音速氣流的壓強大于外界壓強, 氣流在出口處將產生膨脹波, 圖7為高工況時對轉渦輪速度分布云圖。
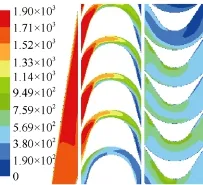
圖7 高工況對轉渦輪速度分布云圖(m/s)Fig. 7 Velocity distribution contour of counterrotating turbine in high velocity mode
在斜切部分開始氣流的壓強降低, 馬赫數增大, 氣流通過膨脹后, 壓強降低到和外界背壓一樣; 從斜切噴嘴出來的氣流經過一級渦輪、二級渦輪, 氣體參數的變化趨勢與中間工況基本一致,由于膨脹波的影響, 二級渦輪流道中葉背與葉凹的氣體速度變化出現不同特性。
噴嘴出口氣體速度在3種工況下經過對轉渦輪后都變的很小, 說明該發動機的余速損失很低。對比單級渦輪機, 對轉渦輪機可減小余速損失 50%左右; 氣體壓強在對轉渦輪中各個位置有較大的差別, 但都圍繞背壓變化; 氣流沖擊葉片時, 由于氣體的可壓縮性, 其部分動能會轉變成內能, 造成氣體參數在葉背和葉凹有變化[11]。
3.2 力矩計算結果與分析
對轉渦輪運行在不同工況時, 通過式(1)和式(2)計算獲得的有效輸出轉矩理論數值與計算流體動力學(computational fluid dynamics, CFD)方法所得到仿真結果見表 2。該仿真結果不考慮一級渦輪與推進器、二級渦輪與輔機系統之間0.95~0.98的機械效率。
通過表 2可知, 一級渦輪和二級渦輪輸出轉矩的仿真結果大于理論數值[12]。原因: 1) 主要因素是沒有考慮機械效率; 2) 本模型為理想模型,與實際產品相比會有微小損耗沒有計算。例如,間隙漏氣損失。以上因素在一定程度上影響了功率計算, 故轉矩值偏大是正常的。
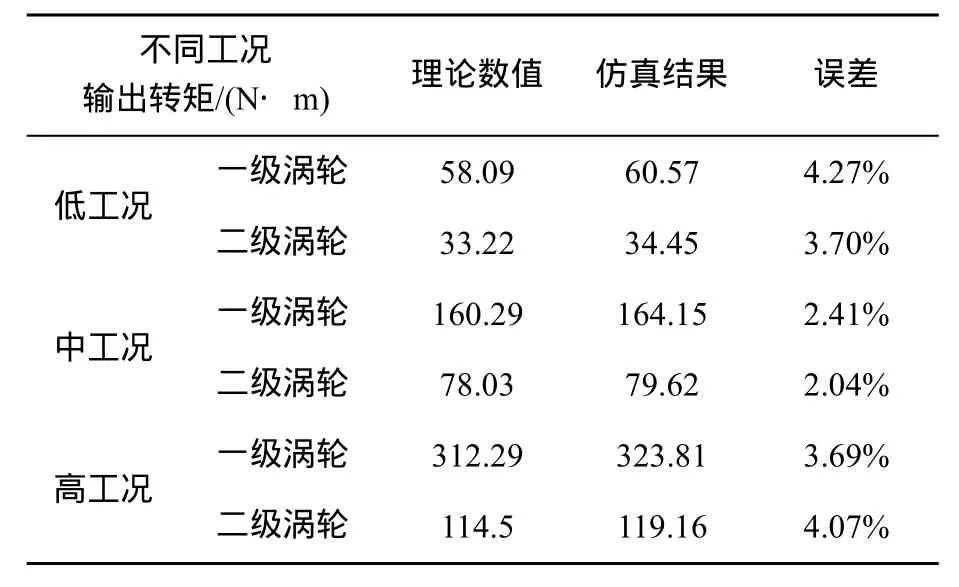
表2 對轉渦輪理論數值與仿真結果對比Table 2 Comparison between the theoretical values andthe simulation results of counter-rotating turbine
仿真結果出現的一級渦輪輸出轉矩和二級渦輪輸出轉矩誤差均處于可接受的工程誤差范圍內, 由此可說明文中使用CFD方法進行對轉渦輪發動機內流場仿真所采用的模型以及所得到的結果是可信的, 解析法加功率修正的有效輸出轉矩公式可以用于對轉渦輪動力系統仿真計算。
4 結束語
對轉渦輪因其在效率、質量以及陀螺力矩等方面具有的優勢, 可為水下航行器增大航速和航程提供了巨大的動力。 新型水下航行器對轉渦輪發動機 2個渦輪盤通過氣動耦合實現對轉, 但轉速不成固定比例, 后一級渦輪充分利用前一級渦輪出口燃氣所攜帶的動能來實現轉動。
文中提出的對轉渦輪發動機應用于水下航行器具有優越性和可行性, 通過對整個通流部分的流體仿真分析可知: 1) 仿真得到的轉矩與理論設計值基本一致, 誤差在5%以內。因此, 采用的理論與仿真分析方法正確、可行, 為下一步的對轉渦輪動力系統建模、控制算法設計提供了支撐; 2)使用對轉渦輪代替常規渦輪, 充分利用了動力系統的特點, 減小了余速損失, 增大了同轉速下的渦輪發動機輸出扭矩。
[1] 周琨, 鄒正平, 劉火星, 等. 航空發動機對轉渦輪氣動設計技術研究進展[J]. 科技導報, 2012, 30(15): 61-73. Zhou Kun, Zou Zheng-ping, Liu Huo-xing, et al. Aerodynamic Design of Counter-rotating Turbine for Aeroengine[J]. Science & Technology Review, 2012, 30(15): 61- 73.
[2] 張進軍, 錢志博, 楊杰, 等. 對轉渦輪用于水下航行器的初步研究[J]. 海軍工程大學學報, 2006, 18(4): 84-89. Zhang Jin-jun, Qian Zhi-bo, Yang Jie, et al. Prel Iminary Study of Counter-rotating Turbines Used on Underwater Vehicles[J]. Journal of Naval University of Engineering,2006, 18(4): 84-89.
[3] Molland Anthony F. The Maritime Engineering Reference Book: A Guide to Ship Design, Construction and Operation[M]. Oxford: Elsevier LTD, 2011.
[4] 查志武, 史小鋒, 錢志博. 魚雷熱動力技術[M]. 北京:國防工業出版社, 2005.
[5] 蔣彬, 羅凱, 高愛軍, 等. 一種微型部分進氣沖動式渦輪機設計方法[J]. 魚雷技術, 2015, 23(5): 353-358. Jiang Bin, Luo Kai, Gao Ai-jun, et al. A Design Approach of Micro Partial Admission Impusle Turbine[J]. Torpedo Technology, 2015, 23(5): 353-358.
[6] 蔣彬, 羅凱, 鄭濤. 微型沖動式部分進氣渦輪機的流場特性及氣動損失[J]. 熱能動力工程, 2015, 30(6): 873-879. Jiang Bin, Luo Kai, Zheng Tao. Flow Field Characteristics and Aerodynamic Losses of a Miniature Impulse Type Partial Admission Turbine[J]. Journal of Engineering for Thermal Energy and Power, 2015, 30(6): 873-879.
[7] Dingle Lloyd. Aircraft Engineering Principles Second Edition[M]. New York: Routledge, 2013.
[8] 周楊, 劉火星, 鄒正平. 無導葉對轉渦輪氣動設計技術[J]. 推進技術, 2010, 31(6): 689-756. Zhou Yang, Liu Huo-xing, Zou Zheng-ping, et al. Aerodynamics Design of Two-stage Vaneless Counter-rotating Turbine[J]. Journal of Propulsion Technology, 2010, 31(6): 689-756.
[9] 趙慶軍, 王會社, 趙曉路, 等. 無導葉對轉渦輪三維流場數值分析[J]. 推進技術, 2006, 27(2): 114-118. Zhao Qing-jun, Wang Hui-she, Zhao Xiao-lu, et al. Three-dmiensional Numerical Investigation of Vaneless Counter-rotating Turbine[J]. Journal of Propulsion Technology, 2006, 27(2): 114-118.
[10] 李代金, 張宇文, 羅凱, 等. 水下熱動力推進系統的無級變速控制研究[J]. 西北工業大學學報, 2009, 27(2): 195-198. Li Dai-jin, Zhang Yu-wen, Luo Kai, et al. Nonlinear Variable-Structure Control for Stepless Speed Changing of Underwater Heat-Engine Propulsion System[J]. Journal of Northwestern Polytechnical University, 2009, 27(2): 195-198.
[11] Lee N J, Choi J W, Hwang Y H. Performance Analysis of a Counter-rotating Tubular Type Microturbine by Experiment and CFD[C]//26th IAHR Symposium on Hydraulic Machinery and Systems. Beijing: Conference Series-Earth and Environmental Science, 2013.
[12] Violeau D. Fluid Mechanics and the SPH Method: Theory and Applications[M]. Oxford: Oxford University Press, 2012.
(責任編輯: 楊力軍)
Theoretical and Simulation Study on Output Torque of Counter-rotating Turbine for Underwater Vehicle
WANG Xin-ping, DANG Jian-jun, LIU Cheng-yong
A new parameter design of counter-rotating turbine engine for an underwater vehicle is presented. The structure characteristics of counter-rotating turbine are analyzed to derive mathematical expressions of effective output torque for the first-stage and the second-stage turbines. Three working modes with different velocities are designed for an underwater vehicle. The nozzles and the first-stage turbine are designed based on the medium velocity mode, while the second-stage turbine is designed based on the highest velocity mode. Furthermore, a model of counter-rotating turbine engine is built to simulate the flow fields for the three working conditions. Comparison between the theoretical calculation results and the simulation results indicates that substitution of the counter-rotating turbine for the conventional turbine can reduce the residual velocity loss and improve the efficiency of the turbine engine, suggesting the correctness and feasibility of the proposed method.
underwater vehicle; counter-rotating turbine; engine; output torque
(School of Marine Science and Technology, Northwestern Polytechnical University, Xi′an 710072, China)
TJ630.34; U674.941; TK471
A
1673-1948(2016)04-0277-06
10.11993/j.issn.1673-1948.2016.04.007
2016-06-14;
2016-07-13.
陜西省自然科學基金項目(2014JQ7263).
王新平(1986-), 男, 在讀博士, 主要研究方向為水下渦輪機技術.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
