航母多機出動甲板作業流程研究*
2016-09-09 09:21:32楊炳恒畢玉泉吳國慶
艦船電子工程 2016年8期
楊炳恒 畢玉泉 張 彪 吳國慶
(海軍航空工程學院青島校區 青島 266041)
YANG Bingheng BI Yuquan ZHANG Biao WU Guoqing
(Qingdao Branch, Naval Aeronautical and Astronautical University, Qingdao 266041)
?
航母多機出動甲板作業流程研究*
楊炳恒畢玉泉張彪吳國慶
(海軍航空工程學院青島校區青島266041)
航母飛行甲板環境差、空間狹窄、保障設施特殊等特點決定了航母多機出動需要合理的甲板作業規劃,否則會造成甲板作業環境擁塞、無序混亂。論文以俄航母艦載機一個批次四架飛機出動為研究原型,創建了多機出動甲板作業流程圖,通過對流程圖分析,給出了計算整個任務作業總時間、關鍵作業活動過程及各個甲板子作業活動最晚開始時間和最早開始時間的方法,可為航母多機出動甲板保障方案的制訂提供決策支持。
艦載機; 多機出動; 甲板作業; 作業流程圖; 航空母艦
YANG BinghengBI YuquanZHANG BiaoWU Guoqing
(Qingdao Branch, Naval Aeronautical and Astronautical University, Qingdao266041)
Class NumberU674.771
1 引言
航空母艦至今仍是世界各軍事強國海軍最重要的主戰裝備之一,其絕大多數作戰使命都需要并且只能由艦載機來承擔和完成。在實際作戰及訓練任務中,艦載機多以多機編隊的形式出動,以形成最大的戰斗力。與岸基戰斗機保障作業環境相比,航母艦載機飛行甲板作業環境有著環境差、空間狹窄、保障設施特殊等特點。艦載機的起飛、降落、停泊、維護等很多工作都要在飛行甲板上完成,在這樣的復雜環境下,指揮人員需要在艦載機多機出動時精準地制定各種保障作業計劃,如加油、供氣、掛彈及引導等作業的時間、地點和資源調度安排;因此,艦載機多機出動時甲板作業流程直接影響著艦載機出動效率和大型艦船作戰能力[1~4]。
外軍航母發展較早,對于航母艦載機甲板作業路程有著比較成熟的經驗,以俄羅斯“庫茲涅佐夫”號航母艦載機起飛時的甲板作業為例,為了順利地完成多架航母艦載機的起飛作業調度,航母配備了專門的指揮系統來規劃設計艦載機的甲板作業流程,甲板作業流程的規劃要考慮環境、設施、人員及作業時間等。航母艦載機多機出動時,出動的飛機嚴格按照預先制訂的甲板作業流程進行機務及勤務的保障直至最后的起飛,每架飛機的甲板作業要嚴格按照預先規定的時間完成,否則會影響下一架飛機的正常起飛,因此,多機出動時的艦載機甲板作業流程的制訂和執行需要經過充分的分析和優化,這樣才能最大效率地提高航母多機出動安全和效率[5]。下面以俄羅斯“庫茲涅佐夫”號航母艦載機一個批次四架飛機出動為例,對航母多機出動甲板作業流程進行研究與分析。
2 多機出動甲板作業流程
2.1單機甲板作業流程
實際工作中,艦載機甲板作業主要是由航空保障部門艦員和航空聯隊的機務人員協同飛行員完成的,每架執行任務的艦載機在甲板都要完成艦載機調運、通風除潮、充氧、加油、充氮、彈藥保障、通電檢查、慣導對準、按路線檢查飛機、滑行至起飛位、偏流板保障、止動裝置保障以及艦載機起飛等作業。由于飛機甲板保障資源及設施的限制,艦載機一般需要在多個站位完成以上的甲板作業。利用拓撲學原理,以點表示具體的工作起止節點,以線表示工作過程,單機甲板作業可以用下面的有向圖1表示。
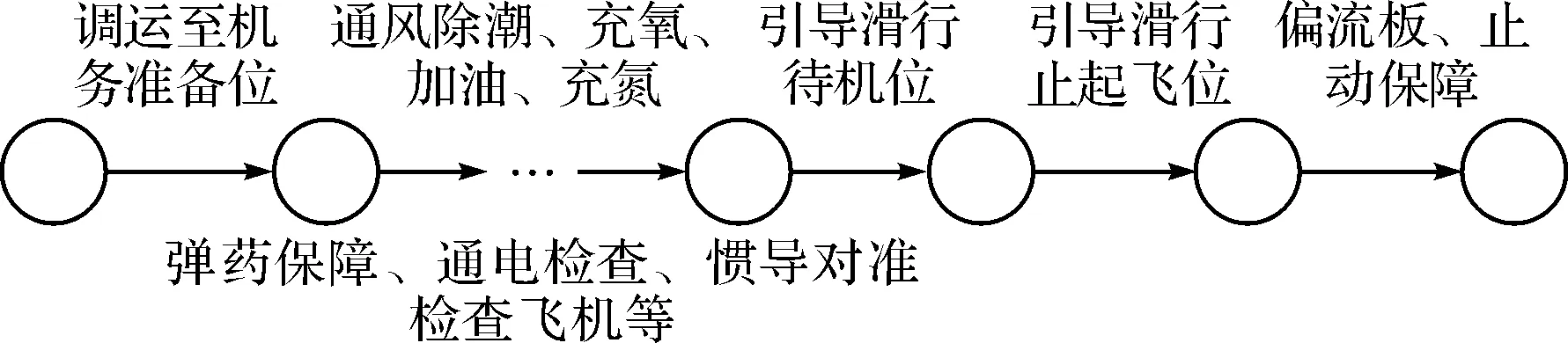
圖1 單機甲板作業流程圖
2.2多機甲板作業流程
多機出動時,由于艦載機起始停機位以及使用的甲板機務保障站位的不同,每架艦載機的單機甲板作業流程雖然有差異,但基本作業流程結構都與圖1類似,考慮以俄羅斯“庫茲涅佐夫”號航母艦載機一個批次四架飛機出動為實例,不考慮其他因素,四架艦載機的甲板作業流程可用圖2來表示。
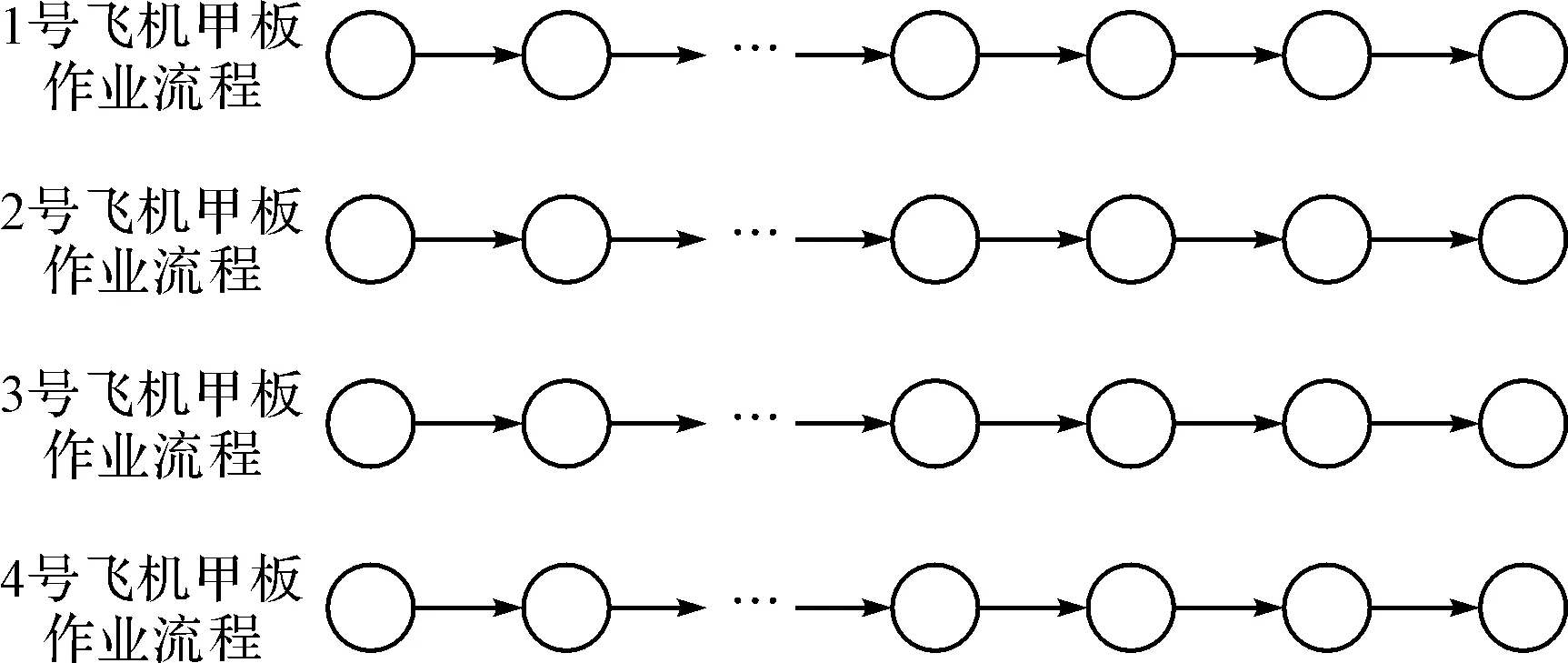
圖2 多機甲板作業流程圖
在實際的多機出動甲板作業實施中,由于甲板保障設施及保障人員的限制,艦載機只有部分的甲板作業可協調同步進行,如在艦載機機務保障位的氧氣、氮氣、彈藥等保障作業;大部分的甲板作業只能串行的進行,如“引導滑行至待機位”作業,一般情況下,甲板保障設施及人員同一時間只能保障一架飛機實施該作業。因此,用并行的拓撲路徑表示可并行的作業,用串行的路徑表示只能串行完成的作業,多機出動時實際的甲板作業流程圖可用圖3表示。
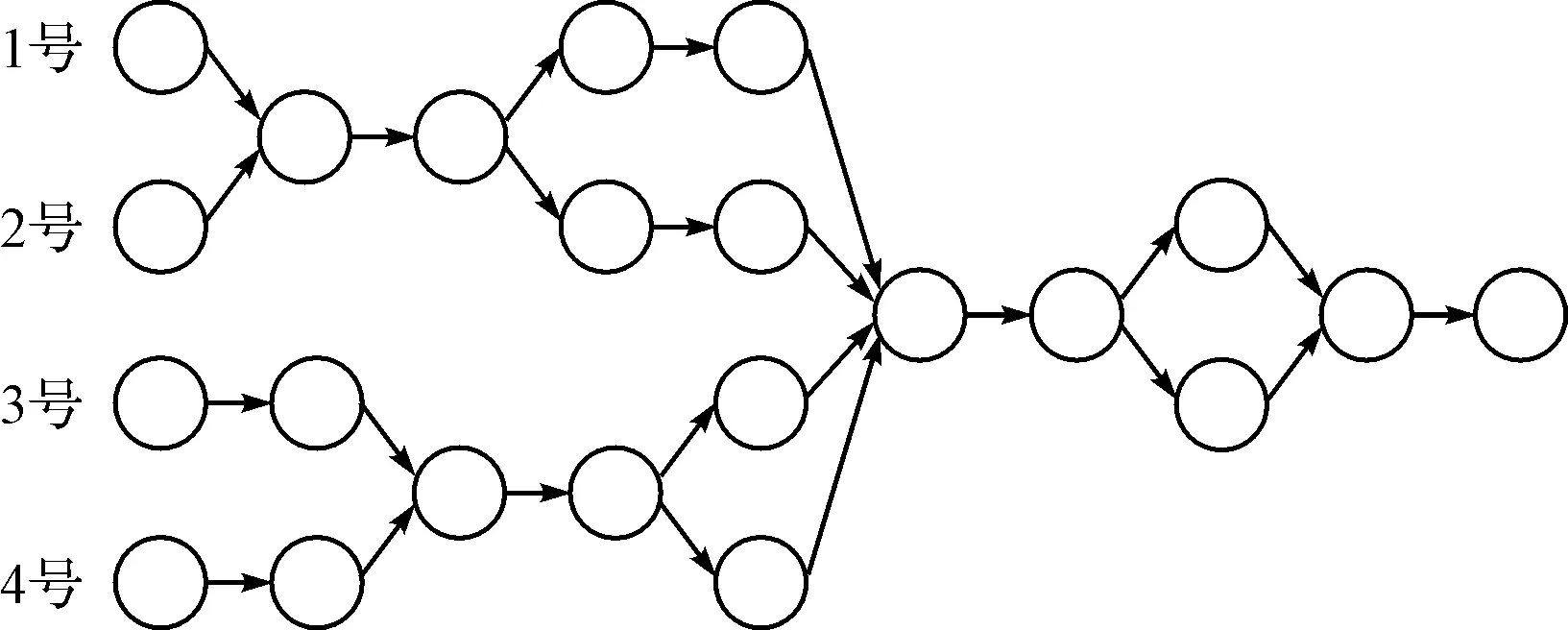
圖3 實際的多機甲板作業流程圖
3 多機出動甲板作業流程分析
3.1多機出動甲板作業流程網
為了便于研究,對圖3的多機甲板作業流程圖進行改造,為流程圖中的每個工作起止節點進行編號,同時根據每項作業的時間為每條路徑進行加權,得到如圖4所示的加權多機甲板作業流程圖,稱之為多機出動甲板作業流程網[6~8]。
圖4中的節點Ti表示艦載機相鄰兩項作業的結束及開始的時間界面,如圖中T2節點可表示“1號艦載機加油完畢”以及“1號艦載機開始彈藥保障”,此時,a1表示1號艦載機加油所需要的時間。
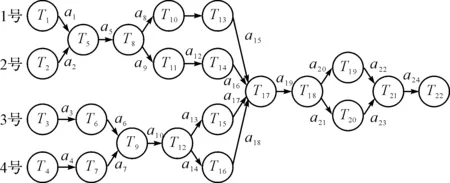
圖4 多機甲板作業流程圖網
注意:圖4中的ai表示的作業時間,不是實際的作業時間,而是在作艦載機保障計劃時根據經驗數據和保障需求規劃的時間,即計劃時間[9~10]。
3.2多機出動甲板作業流程研究
從圖4的多機甲板作業流程圖網中可以得出,有向邊的權ai表示該有向邊代表的作業活動需要的完成時間,這樣多機出動時1號艦載機甲板作業的總時間T(1#)可用時間序列a1a5a8a11a15a19a20a22a24,作業過程A(1#)可用節電序列T1T5T8T10T13T17T18T19T21T22;同樣的可以得到2、3、4號艦載機甲板作業的總時間T(2#)、T(3#)、T(4#)和作業過程A(2#)、A(3#)、A(4#)。分析多機甲板作業流程圖網可以直接得出:
1) 整個多機出動的作業任務完成需要的總時間Ti總為T(1#)、T(2#)、T(3#)、T(4#)中最大的時間;
2) 決定多機出動總時間的作業過程A(i#)為整個多機出動任務的關鍵作業過程;
3) 減少關鍵作業過程的作業時間可在一定范圍內提高整個作業任務完成需要的總時間。
作業流程交通網中串行的單一路徑為關鍵作業,關鍵作業所耗費時間變化直接影響著整個艦載機作業的完成時間,提高關鍵作業完成效率可直接對艦載機作業流程進行時間優化。
定義在艦載機甲板作業任務實施中,作業活動在最晚的時刻內開始也不影響艦載機整個流程的總完成時間的時刻稱之為最晚開始時間Ti晚,作業活動滿足開始時間可以開始實施的最早開始時間為Ti早,從圖中分析可以得出,作業活動Ti的最早開始時間為前項任務作業過程完成的最后時間;作業活動Ti的最晚開始時間為總的任務時間減去后續作業所需的總時間。
為簡化公式表達,抽取圖4中的部分流程子網進行研究分析(見圖5),研究分析的結果可直接映射到整個的作業流程圖網中。

圖5 多機甲板作業流程圖子網
在圖5中不考慮其他特殊的因素,作業活動T1的最早開始時間為T1早0,最晚開始時間為T1晚=T8總-a5-a1。如作業過程序列T1T5T8為任務階段A8的關鍵作業過程,則T1晚=0。
作業活動T5的最早開始時間為T5早為a1和a2的最小值,即T5早=Min(a1,a2);作業活動T5的最晚開始時間為后續作業活動T5晚=T8晚-a5。
利用同樣的分析計算方法我們可以得到:
活動T2最早開始時間及最晚結束時間:T2晚=0;T2晚=T8總-a5-a1。
活動T8最早開始時間及最晚結束時間:T8早=T5早+a5;T8晚=T17總-Min(a8+a11+a15,a9+a12+a16)。
活動T10最早開始時間及最晚結束時間:T10早=T8早+a8;T10晚=T17總-Min(a11+a15,a12+a16)。
活動T11最早開始時間及最晚結束時間:T11早=T8早+a9;T11晚=T17總-Min(a11+a15,a12+a16)。
活動T13最早開始時間及最晚結束時間:T13早=T10早+a11;T13晚=T17總-Min(a15,a16)。
活動T14最早開始時間及最晚結束時間:T14早=T11早+a11;T14晚=T17總-Min(a15,a16)。
活動T17最早開始時間:T17早= Min(a1+a5+a8+a11+a15,a2+a5+a9+a12+a16)。
在求得了各個甲板作業活動的Ti早、Ti晚后,可以在多機出動甲板作業流程規劃時,根據艦載機狀態、人員配置及保障設施的情況合理地協調各個保障小組及人員的作業時序,編制最為合理的多機出動甲板作業流程,使人員和裝備得到最大的利用效率,保障整個多機出動任務的快速順利安全實施。
4 結語
通過對俄羅斯“庫茲涅佐夫”號航母艦載機一個批次四架飛機出動的甲板作業的流程模型建立及分析,給出了計算整個任務作業總時間、關鍵作業活動過程以及各個甲板子作業活動最晚開始時間和最早開始時間的方法。
在航母艦載機多機出動任務中,可以利用本文提出的方法對甲板作業進行分析研究,從而對航母多機出動甲板作業流程進行合理規劃,以保障艦載機甲板作業的安全、快速有序的實施,為編制艦載機甲板保障方案提供決策支持。
[1] 張勇,周益.美國艦載航空甲板運動準則[J] .中國艦船研究,2012,7(1):30-42.
[2] 陳傳錚.航母的飛行甲板[J].航母經緯,2005(5):39-41.
[3] 陳練.美國海軍提高艦載機出動架次率的新招數[J].現代艦船,2008(10):24-26.
[4] 史文強,李彥慶,陳練.航空母艦飛行甲板作業及彈藥轉運系統分析[J].中國艦船研究,2012,7(3):9-14.
[5] 趙登平,李彥慶,陳練.航空母艦研制面面觀[M].北京:海潮出版社,2012:197-199.
[6] 楊炳恒,畢玉泉,徐偉勤.一種艦載機調運作業流程優化模型[J].艦船科學技術,2011,33(1):118-121.
[7] 楊炳恒,王海東,韓峰,等.艦載機調運作業流程優化研究[J].科學技術與工程,2010,22(10):5602-5605.
[8] Maegegor M H,Grover WD.OPtimized k-shortest Paths algorithm for faeitity restoration[J].Software Praetice and ExPerienee,1994,24(9):823-828.
[9] EPPstein D. Finding the k shortest Paths[J]. SIAM Joumal on ComPuting,1999,28(2): 652-673.
[10] Gliu, K G Ramakrishnan. A*Prune:An algorithm for finding k shortest Paths subject to multiple constraints[C]//Proceedings of the INFo-COM 2001 Confereee, IEEE, Anehorage, Alaska,2001:743-74.
Deck Workflow of Carrier Multi-aircraft Sortie*
The poor environment, confined space, and special support equipment of aircraft carrier flight deck determine that deck workflow of carrier multi-aircraft sortie needs to be designed properly, otherwise it will make deck work environment congested and out-of-order. In this paper, a batch of four aircrafts’ sortie of Russian carrier is researched as model, and deck workflow chart of multi-aircraft sortie is presented. Through the analysis of flow chart, the calculating methods for operation all time, the first and last time of key operation and all deck sub-operation are proposed, which can provide decision support on deck support plan of carrier multi-aircraft sortie.
aircraft, multi-aircraft sortie, deck operation, work flow chat, aircraft carrier
2016年2月4日,
2016年3月11日
楊炳恒,男,碩士,副教授,研究方向:艦面保障、裝備保障信息化等。畢玉泉,男,碩士,副教授,研究方向:艦面保障。張彪,男,碩士,講師,研究方向:計算機應用。吳國慶,男,碩士,講師,研究方向:監視技術。
U674.771
10.3969/j.issn.1672-9730.2016.08.037
猜你喜歡
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
海峽姐妹(2018年3期)2018-05-09 08:20:40
故事大王(2016年7期)2016-09-22 17:30:08
