反潛魚雷與自航式聲誘餌對抗技術及發展*
2016-09-09 09:21:21陸元樂王新華楊迎化張選東
艦船電子工程 2016年8期
關鍵詞:信號
陸元樂 岳 崴 王新華 楊迎化 張選東
(1.海軍駐昆明750試驗場軍事代表室 昆明 650051) (2.海軍潛艇學院 青島 266100) (3.92730部隊 三亞 572016)
LU Yuanle1 YUE Wei2 WANG Xinhua2 YANG Yinghua2 ZHANG Xuandong3
(1.Navy Representative Office in Kunming 750 Test Range, Kunming 650051) (2.Navy Submarine Academy, Qingdao 266100) (3.No.92730 Troops of PLA, Sanya 572016)
?
反潛魚雷與自航式聲誘餌對抗技術及發展*
陸元樂1岳崴2王新華2楊迎化2張選東3
(1.海軍駐昆明750試驗場軍事代表室昆明650051) (2.海軍潛艇學院青島266100) (3.92730部隊三亞572016)
反潛魚雷面臨潛艇發射的自航式聲誘餌等對抗器材的威脅。論文介紹了自航式聲誘餌的工作原理,闡述了魚雷對抗自航式聲誘餌的有效方法即目標尺度識別技術的原理。深入介紹了自航式聲誘餌的新發展即自航式拖曳聲誘餌的工作原理以及反潛魚雷反對抗的新方法。
自航式聲誘餌; 反潛魚雷; 對抗; 尺度識別
LU Yuanle1YUE Wei2WANG Xinhua2YANG Yinghua2ZHANG Xuandong3
(1.Navy Representative Office in Kunming 750 Test Range, Kunming650051) (2.Navy Submarine Academy, Qingdao266100) (3.No.92730 Troops of PLA, Sanya572016)
Class NumberTJ630
1 引言
反潛魚雷對敵方潛艇目標實施探測、定位、跟蹤,以保證實現最終戰斗使命。而同時,為了提高潛艇的戰斗力和生存力,各國海軍在加強潛艇規避能力和隱蔽性的同時,研制和裝備了各類水聲對抗器材,而其中自航式聲誘餌是目前對抗反潛魚雷最有效的方法之一[1~4]。
2 自航式聲誘餌原理
聲誘餌是一種欺騙性水聲對抗器材,通過誘騙聲自導魚雷,使其遠離母艇,從而掩護母艇逃遁,提高母艇的生存概率。聲誘餌對抗功能主要有兩方面:一是具有回音重發功能,能應答聲自導魚雷發出的主動聲脈沖信號,并附加一個時延和多譜勒頻移。二是可以模擬潛艇的輻射噪聲,作為一個強的假目標引誘被動聲自導魚雷。典型的裝備有美國的MK70-MDSS型自航式潛艇模擬器與MK38MMT反潛訓練靶。
自航式聲誘餌是一種帶有動力的能自航行的目標信號模擬器,它能模擬目標的運動和聲學特性,并能進行磁場模擬[5~6]。其主要功能是用聲特性來誘騙主被動自導魚雷,造成魚雷攻擊失敗。自航式聲誘餌外形像魚雷,其航行彈道可預設定。其主要特點是通用性好,能平戰結合,戰時可作為水聲對抗誘餌,平時可作為反潛訓練或魚雷試驗的水下活動目標,對抗措施多樣化、智能化。自航式聲誘餌既可發射大功率噪聲,又可對魚雷發出的主動聲脈沖信號應答,因此可針對性地對抗主、被動工作的自導魚雷。
2.1自航式聲誘餌被動對抗原理
自航式聲誘餌發出的噪聲有一定的干擾作用,但主要是作為一個假目標使用,因此,其輻射噪聲頻譜應盡量模擬潛艇的頻譜,以達到以假亂真的目的[7~8]。被動工作開始后,其主要功能是連續發射與真實潛艇噪聲特性相似的寬帶噪聲。模擬的噪聲在低頻段和高頻段有不同的要求和性能,其工作原理如圖1所示。

圖1 自航式聲誘餌被動對抗原理
2.2自航式聲誘餌主動對抗原理
誘餌是通過應答主動脈沖信號來模擬目標的反射特性的。根據誘餌應答方式的不同,其對抗情況應分別處理。一種情況是誘餌接收到主動探測脈沖后,按模擬一個固定目標強度值計算出應答源級,然后按應答源級值附加一定的多普勒頻移和回波展寬,將信號發射出去,以此模擬一個運動著的有一定幾何體積的具有定常目標強度的潛艇目標。這是誘餌常用的模擬方式。
一旦設定了聲誘餌的主動工作模式,其工作有兩個方面的內容:首先是在很強的噪聲背景(包括背景噪聲、潛艇的輻射噪聲尤其是聲誘餌本身發射的輻射噪聲等)中檢測并提取出魚雷的自導尋的探測信號;在得到此信號后,經過對其進行一定的處理得到應答信號發射出去。誘餌的主動工作過程主要包括三個步驟:尋的信號的檢測、尋的信號的復制以及應答信號的生成,其工作原理如圖2所示。
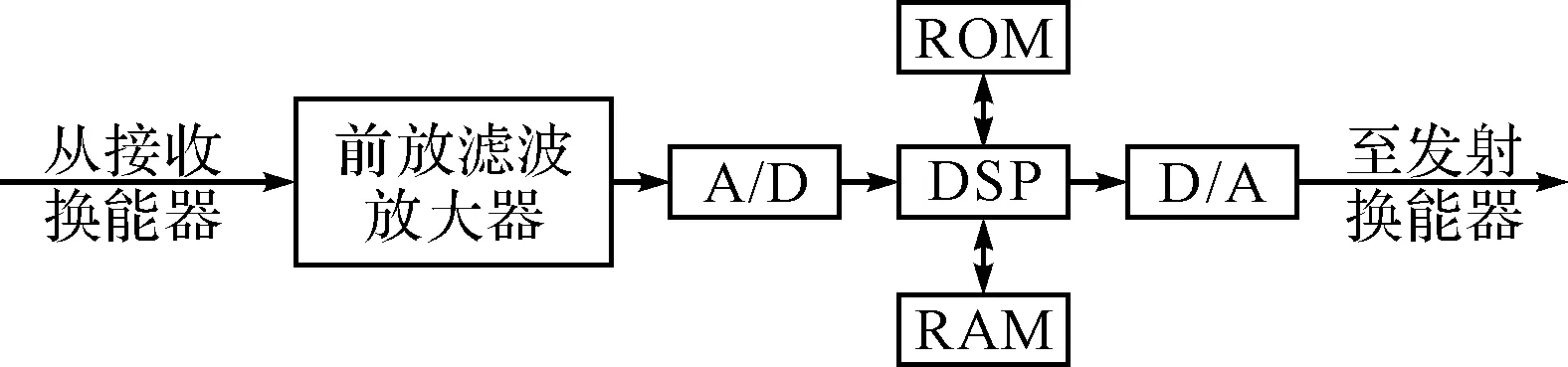
圖2 自航式聲誘餌主動對抗原理
3 反潛魚雷目標尺度識別技術原理
為保證魚雷能夠正確識別自航式聲誘餌等假目標的欺騙,魚雷自導系統必須具備對目標進行分類和識別的能力,其中目標尺度識別技術是行之有效的方法之一[9~10]。
對于潛艇等較大型的目標來說,由于具有一定的尺度,一般均在100m左右,其產生的反射回波信號源于一個在距離和方位上有一定分布的延展體。這個延展體可以近似等效在空間上有一定分布的若干個“亮點”目標之和,如圖3所示。
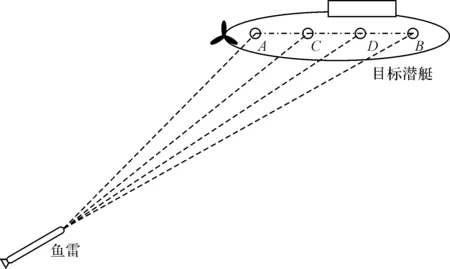
圖3 魚雷捕獲潛艇亮點示意圖
聲誘餌可以模擬目標回波的某些特征量,如回波展寬、多普勒頻移、輻射噪聲、目標亮點等,但很難模擬目標的巨大尺度。因此,目標尺度特征是最重要有效回波的特征,尺度識別技術也就成為當前魚雷上采用的有效的目標識別手段。
一般有兩種方法。一是根據脈沖的回波展寬來確定目標的幾何尺度,較大的目標一般應有較大的回波展寬;另一是根據回波的亮點數來確定目標的尺度,當波束角很小時,在700m~800m的距離上,潛艇應至少在兩個波束內有回波。若只有一個波束內有回波,就認為目標為假目標。其原理如圖4所示。
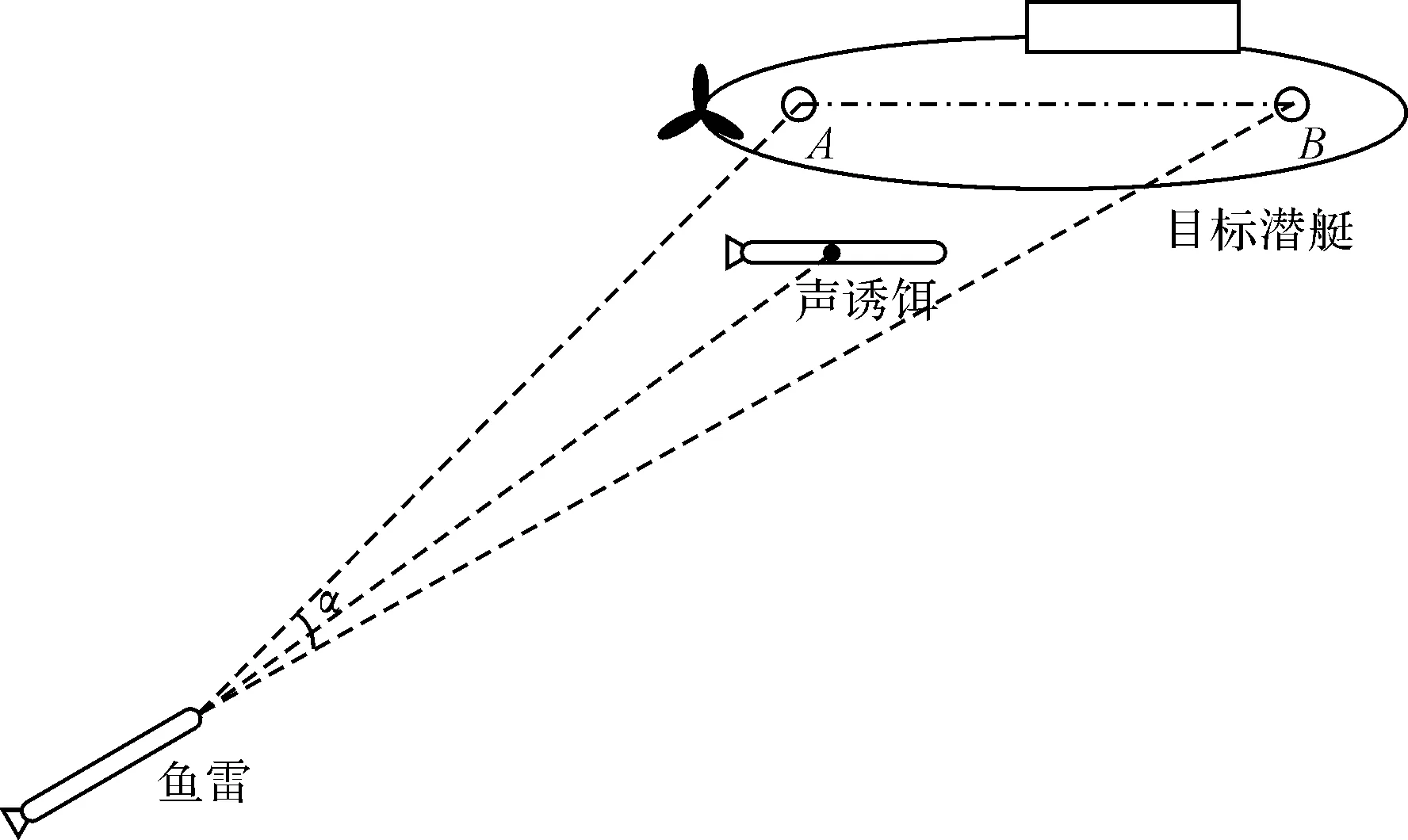
圖4 目標尺度識別技術示意圖
從圖4中可以看出,真實潛艇目標上的亮點A和B與魚雷所形成的夾角為α,說明目標具有較大的尺度,魚雷將識別出其為真實潛艇目標。而自航式聲誘餌上只有一個亮點,魚雷將識別出其為點源目標,從而魚雷會忽略聲誘餌而跟蹤真實潛艇目標。
目前,所有現役的聲誘餌共同的不足就是不能模擬潛艇等真實目標的尺度特性,也就是說它們只能模擬點目標,而不能模擬體目標。從誘騙器材的角度來看,模擬回波展寬比較容易,但模擬多于一個波束的回波難度相當大,主要是受聲誘餌的尺度限制,所以出現了自航式拖曳聲誘餌。
4 自航式拖曳聲誘餌原理及其對抗技術
自航式拖曳聲誘餌的結構示意如圖5所示。

圖5自航式拖曳聲誘餌示意圖
自航式拖曳聲誘餌由聲誘餌本體和拖曳換能陣組成,使用時由聲誘餌本體拖著拖曳換能陣在水下航行。自航式拖曳聲誘餌的拖曳換能陣由若干個無指向性的換能器及把它們連接在一起組成線陣的纜繩等輔助設備組成。從理論上說拖曳換能陣越長陣元越多,模擬效果越好。為拖曳方便和實際需要,自航式拖曳聲誘餌可以采用細長的線列陣。由于要極其逼真地模擬潛艇等真實目標的輻射噪聲、機動運動、回波反射、尺度等特性,因此工作時自航式拖曳聲誘餌必須能同時模擬潛艇的輻射噪聲(被動方式)和主動回波信號(主動方式)。由于自航式拖曳聲誘餌要主、被動同時工作,所以可以讓陣列的某些陣元一直不停地發射模擬的潛艇噪聲,而讓另外的一些陣元去檢測魚雷發射的主動信號和進行回波應答。自航式拖曳聲誘餌一旦檢測到敵方魚雷的主動信號,就對檢測到的信號進行相關的處理(如多普勒處理等),并對主動信號進行回波應答,以此來模擬潛艇等真實目標的回波反射特性、尺度特性。由于用于主動檢測的各個陣元分布在線列陣中不同的位置,魚雷主動信號到達各個陣元的時間是不同的,因而各個陣元發射的主動回波在時間上就有了先后之差。因為魚雷收到的回波信號是線列陣上各個不同的陣元在不同時刻上發出的信號的總和,所以魚雷收到的回波不僅有時間上的信息,而且還包含了空間方位(目標尺度)上的信息,這樣的回波與實際潛艇回波寬度相似,從而可以達到模擬真實目標的目的。自航式拖曳聲誘餌工作原理如圖6所示。
從圖6中可以看出,真實潛艇目標上的亮點A和B與魚雷所形成的夾角為α,自航式拖曳聲誘餌上的亮點E和F與魚雷所形成的夾角為β,α與β大小相差不大,從而實現自航式拖曳聲誘餌模擬真實潛艇目標尺度的目的。
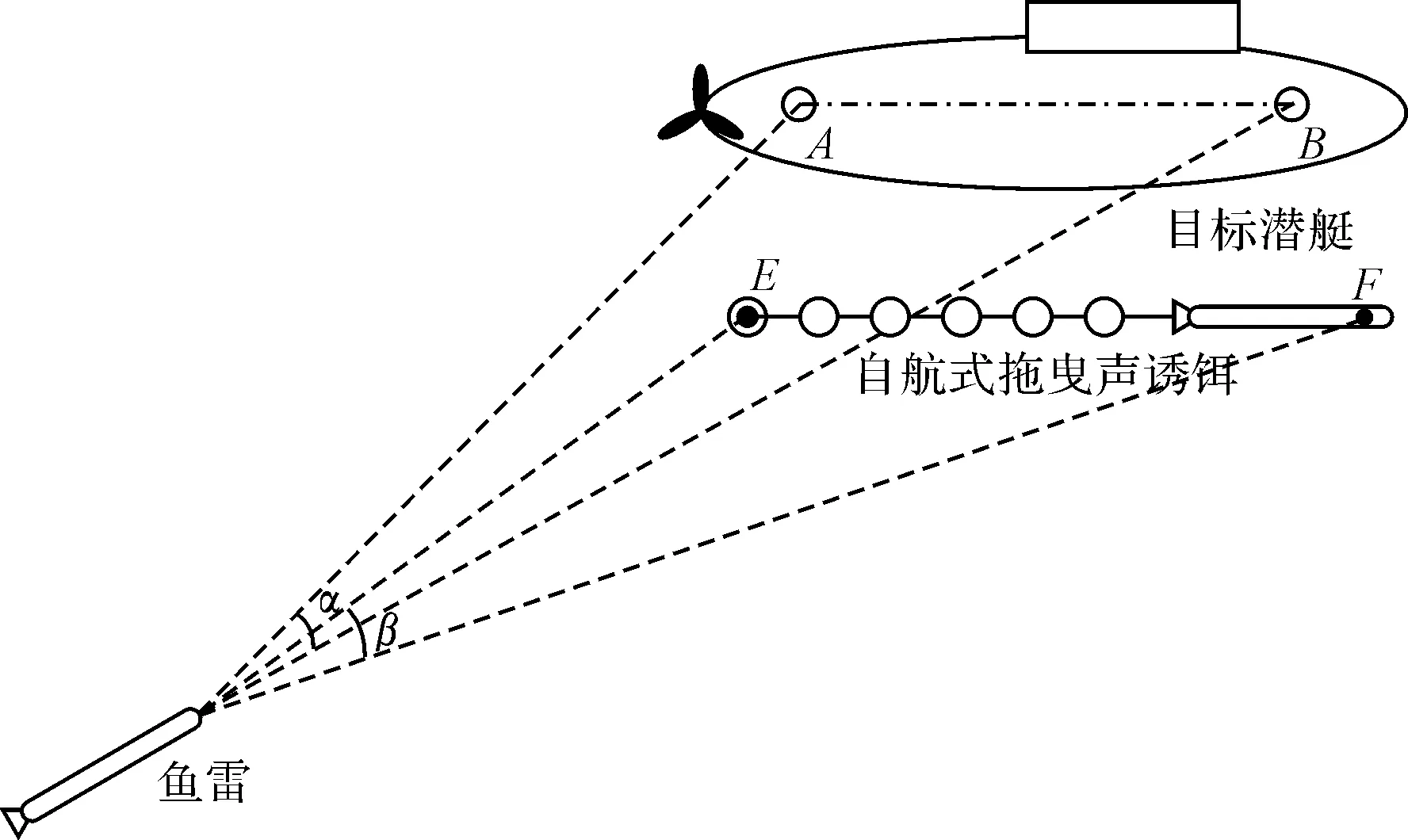
圖6 自航式拖曳聲誘餌工作原理
隨著技術的發展,為了對抗自航式拖曳聲誘餌,出現了目標高度識別技術。其原理如圖7所示。
圖7 魚雷對抗自航式拖曳聲誘餌示意圖
從圖7中可以看出,真實潛艇目標上的水平亮點A和B與魚雷所形成的夾角為α,垂直亮點G和H與魚雷所形成的夾角為λ,而自航式拖曳聲誘餌由于垂直高度的限制,很難模擬真實潛艇目標上的垂直亮點G和H,也就不具有垂直夾角λ。在識別距離內,當水平、垂直方向上檢測出的不同亮點方位差大于識別門限時,系統即認定目標是有別于點源目標的尺度目標。由于自航式拖曳聲誘餌只能模擬潛艇的尺度(長度)信息,而不能模擬潛艇的高度信息,所以采用這種技術可以使魚雷識別出自航式拖曳聲誘餌而攻擊真正的潛艇目標。
5 結語
隨著技術與戰術的發展,反潛魚雷與誘餌的對抗和反對抗技術也在不斷發展,魚雷變得越來越智能,反魚雷的誘餌對抗技術也隨之得到更進一步的發展,互為消長。在新型魚雷上采用新的更有效的反對抗技術刻不容緩,再先進的魚雷如果不具備水聲對抗技術,其將失去應有的戰斗力。
[1] 冷畫屏,謝榮鴻,鄒振華.自航式聲誘餌對抗聲自導魚雷效能仿真分析[J].艦船電子工程,2010,30(10):167-169.
[2] 盧萬,李釗.國外反魚雷水聲對抗技術與發展趨勢[J].艦船電子對抗,2008,31(1):50-53.
[3] 張維全,宋緒棟,周新鵬.對抗寬帶自導魚雷的一種聲誘餌實現技術[J].艦船科學技術,2008,30(5):158-160.
[4] 陳軍,黃建國,潘小京.自航式聲誘餌對抗聲自導魚雷有關問題研究[J].電聲技術,2008,32(8):41-44.
[5] 陳寧,潘功配,陳昕,等.現役反魚雷軟殺傷技術局限性分析[J].艦船科學技術,2006,28(3):78-82.
[6] 周敏佳,袁志勇.潛艇自航式誘餌組合對抗使用方法[J].探測與控制學報,2015,37(2):12-14.
[7] 夏佩倫,李本昌.潛用自航式聲誘餌發展有關問題探討[J].火力與指揮控制,2012,37(3):1-3.
[8] 陳迎春,吳碧,蔡旭東.自航式聲誘餌對抗聲自導魚雷的策略[J].艦船科學技術,2012,34(6):83-86.
[9] 李長軍,馬宏巖,廉力之.潛射自航式聲誘餌發展趨勢研究[C]//2014年水聲對抗技術學術交流會論文集,2014.
[10] 李斌,王順杰.潛艇應用自航式聲誘餌防御聲自導魚雷仿真研究[J].指揮控制與仿真,2014(3):98-103.
Technology and Development of Counterwork Between ASW Torpedo and Self-propulsion Acoustic Bait*
ASW torpedo is confronted with threat of submarine-born counterwork equipment such as self-propulsion acoustic bait. The paper introduces the principle of self-propulsion acoustic bait. It also expounds the principle of scale identification, which is the effective method for ASW torpedo to counter self-propulsion acoustic bait. It goes deep into the principle of self-propulsion towed acoustic bait, which is the latest development of self-propulsion acoustic bait. It also introduces ASW torpedo counter countermeasure.
self-propulsion acoustic bait, ASW torpedo, counterwork, scale identification
2016年2月8日,
2016年3月21日
陸元樂,男,高級工程師,研究方向:水中兵器試驗。岳崴,男,研究方向:潛射武器裝備管理。王新華,男,副教授,研究方向:水中兵器。楊迎化,男,講師,研究方向:水中兵器。張選東,男,高級工程師,研究方向:武器系統。
TJ630
10.3969/j.issn.1672-9730.2016.08.002
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
