艦載聲吶與航空吊放聲吶協同雙基地搜索范圍研究
2016-09-07 06:24:32韓建輝楊日杰鄭曉慶李大衛
聲學技術 2016年2期
韓建輝,楊日杰,鄭曉慶,李大衛
?
艦載聲吶與航空吊放聲吶協同雙基地搜索范圍研究
韓建輝1,2,楊日杰2,鄭曉慶2,李大衛2
(1. 西北工業大學航海學院,陜西西安 710072; 2. 海軍航空工程學院電子信息工程系,山東煙臺 264001)
針對艦載聲吶與航空吊放聲吶構成的異類傳感器雙基地工作問題,建立了基于聲吶方程的海洋環境噪聲背景下雙基地搜索范圍模型。在艦載聲吶與航空吊放聲吶雙基地協同工作系統中,艦載聲吶發射探測信號,艦載聲吶和航空吊放聲吶均接收水下目標回波信號。根據能量關系建立了擴展面積、擴展距離、等效半徑模型,定量分析了聲源級、基線長度等因素對系統搜索范圍的影響。仿真結果表明,當艦載聲吶聲源級相對于吊放聲吶聲源級足夠大時,協同雙基地工作模式在較大的基線長度范圍內不僅在搜索范圍上優于艦載聲吶和吊放聲吶均獨立工作時的單基地聯合搜潛,而且在搜索寬度上也有優勢。
雙基地聲吶;搜潛范圍;航空吊放聲吶;艦載聲吶
0 引言
隨著減震降噪、消聲等技術的不斷發展和制造工藝的不斷升級與完善,水下目標的輻射噪聲級越來越低,主動反射波越來越弱,其隱身能力得到了持續的改進。水下目標隱身能力的增強對聲吶系統的搜索、檢測、跟蹤和目標識別等形成了巨大的挑戰,使傳統的吊放聲吶、聲吶浮標、艦殼聲吶和拖曳聲吶等對水下目標的探測能力明顯降低,作用距離快速減小,水下目標搜索任務變得越來越困難。多基地聲吶技術是應對挑戰的有效方法之一,聲吶接收機和發射機分置,接收機遠距離接收水下目標反射回波。由于接收機不輻射聲能量,水下目標難以判斷其是否存在,隱蔽性好,同時可利用主動大功率聲源的能量優勢,提高探測距離。艦載聲吶與航空吊放聲吶多基地搜索是一種可行的多基地工作方式,艦載聲吶發射大功率探測聲信號,航空吊放聲吶接收水下目標反射回波,通過機載聲吶信號處理系統完成對目標的探測和定位。
文獻[1]研究了海洋環境噪聲背景下雙基地聲吶探測范圍,分析了雙基地的優勢區域和優勢角。文獻[2]給出了多基地聲吶在浮標布陣中的應用。文獻[3]研究了多基地聲吶探測范圍。文獻[4]對混響背景下單、雙基地聲吶的探測范圍進行了比較。文獻[5-9]研究了多基地聲吶系統的傳感器布設問題。在上述文獻中為了簡化分析常常忽略海水吸收,且常常將單個具有主被動功能傳感器的發射參數和接收參數分別作為雙基地聲吶的收發參數,以此為基礎開展研究,此時雙基地聲吶的最大探測范圍是以收、發基地為焦點的卵形線所圍面積。而實際搜索過程中異類聲吶傳感器聯合多基地探測也是重要的搜索方式之一。異類聲吶傳感器多基地搜索是否可以提高水下搜索范圍,其探測能力對于獨立聯合工作聲吶具有多大優勢,并沒有進行定量的分析。本文以多基地聲吶方程為基礎,從能量關系出發,對艦載聲吶與航空吊放聲吶多基地搜潛進行研究,在仿真的基礎上定量分析其相對于獨立聯合工作的探測范圍和能力,對于艦載聲吶與航空吊放聲吶多基地水下搜索和使用具有重要的意義。
1 艦載聲吶與航空吊放聲吶多基地搜潛范圍
1.1 雙基地聲吶幾何配置
雙基地聲吶幾何配置關系如圖1所示。表示發射聲源,它可以作為聲源向水下輻射聲脈沖,也可以工作在單基地模式,同時具有發射聲波和接收目標回波的功能。為接收機,它與發射機分開一定的距離,以被動方式工作,其位置難以被目標確定,隱蔽性好。為水下目標。為發射機到目標的距離。為目標至接收機的距離。通常,在接收端所測量的是距離和。在雙基地條件下,定義基線長度為發射機與接收機之間的距離。為在聲波發射端所測量的波束指向角。為接收波束指向角。為分置角,定義為以目標為頂點,發射基地、接收基地與目標連線之間的夾角。
1.2 雙基地探測范圍
艦載聲吶發射大功率探測聲波,機載吊放聲吶接收目標的反射回波。雙基地聲吶方程如下:

若艦載聲吶和機載聲吶均獨立工作,則相應的艦載單基地聲吶方程為

(3)

(5)
艦載聲吶與航空吊放聲吶構成的雙基地系統等效半徑[1]為。則有:
由式(6)容易看出,若艦載聲吶的聲源級高于吊放聲吶的聲源級,雙基地系統等效半徑大于吊放聲吶單基地作用距離。
式(6)確定的軌跡是以發射機和接收機為焦點的卡西尼卵形線,當發射機與接收機位于同一位置時,探測范圍是半徑為的圓;當發射機與接收機相距大于時,探測范圍分裂為兩個封閉區域。圖2給出了不同基線距離條件下雙基地系統的探測范圍。
假設艦載聲吶單基地工作半徑等于雙基地聲吶系統等效半徑。雙基地擴展面積定義為雙基地覆蓋范圍減去其與艦載聲吶單基地工作覆蓋范圍交疊部分后剩下的面積。圖3給出了擴展面積示意圖,圖中左側為艦載聲吶單基地工作覆蓋范圍,卵形線為雙基地覆蓋范圍,虛線所圍面積即為雙基地擴展面積。
以艦載聲吶和吊放聲吶基線中點作為極點,以基線為極軸建立極坐標系,對雙基地搜索面積進行積分求解[1],利用三角關系和積分因子冪級數展開得到搜索面積和擴展面積。
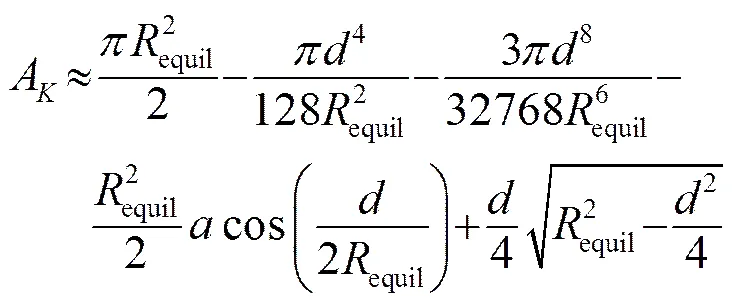
(8)
(10)
考慮到球面波傳播損失和海水吸收損失,
(13)
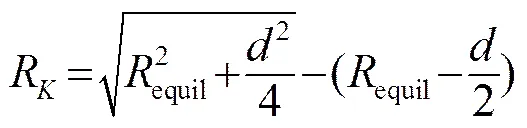
由于考慮了海水吸收損失,作用距離相對未考慮時下降,相應的有效覆蓋面積也降低,其覆蓋范圍類似于卡西尼卵形線。當接收機和發射機位于同一位置時,覆蓋范圍為圓形,隨著接收機距離發射機越來越遠,覆蓋范圍封閉曲線開始逐漸扭曲,最終分離為兩個獨立的封閉區域。與未考慮海水吸收損失時類似,此時的雙基地等效半徑即為雙基地覆蓋范圍開始發生扭曲時基線長度的一半,即
解方程可得:
(15)
2 仿真分析
2.1 不考慮聲吸收的理想情況下協同雙基地搜索范圍仿真
不考慮聲吸收,假設艦載聲吶單基地工作半徑等于雙基地聲吶系統等效半徑,為發射機和接收機距離,歸一化基線距離為發射機和接收機間的距離與雙基地聲吶系統等效半徑的比值。取值范圍為1~5。為艦載聲吶發射聲源級與吊放聲吶發射聲源級之差,取值范圍為[0,20],單位為dB。吊放聲吶作用范圍為,艦載聲吶與吊放聲吶構成的協同雙基地系統的擴展面積為,擴展面積比。不考慮海水吸收情況,圖4給出了擴展面積比隨歸一化基線距離和聲源級差的變化關系。從圖中可以看出,當聲源級差一定、且時,擴展面積隨著基線距離的增加而增加,當時,擴展面積隨著基線距離的增加而迅速減小。當聲源級差比較小時,面積比小于1,此時擴展面積相對于吊放聲吶探測范圍沒有增加,而隨著聲源級差的增加,面積比超過1,且聲源級差越大,增加速度越快。
2.2 考慮海水聲吸收時協同雙基地搜索范圍仿真
艦載聲吶作為主動聲源發射探測信號,機載吊放聲吶與艦載聲吶同時接收水下目標回波信號,構成雙基地工作方式,這里稱為雙基地協同工作模式。采用數值解法分別仿真不同艦載聲吶聲源級條件下協同雙基地聲吶工作覆蓋范圍與雙基地擴展面積。
由公式(15)可得到雙基地等效半徑。圖5(a)給出了艦載聲吶聲源級取230 dB、基線距離分別取1~2.5倍等效半徑時,雙基地聲吶的工作覆蓋范圍,圖5(b)給出了相應的擴展面積比。此時雙基地等效半徑為30743 m。基線距離采用雙基地等效距離歸一化,擴展面積指雙基地協同工作模式覆蓋范圍與艦載聲吶獨立工作覆蓋范圍之差,擴展面積比定義為擴展面積與吊放聲吶單基地工作覆蓋范圍的比值,即歸一化雙基地擴展面積。擴展面積比大于1,則協同雙基地的搜索范圍大于艦載聲吶和吊放聲吶單基地工作范圍,協同雙基地工作搜索范圍存在優勢,若擴展面積比小于1,則搜索范圍優勢喪失。
(a) 艦載聲吶與吊放聲吶雙基地工作覆蓋范圍對比,SL=230 dB
(b) 歸一化雙基地擴展面積比,SL=230 dB
圖5 雙基地工作范圍和擴展面積比(V=230 dB)
Fig.5 Operation region and extended area ratio of bistaic sonar (SL=230 dB)
由圖5(a)可知,隨著吊放聲吶距離艦載發射源越來越遠,雙基地聲吶覆蓋范圍越來越小,當大于2倍等效半徑后覆蓋范圍分裂為兩個獨立區域,此后雙基地覆蓋范圍隨著基線長度增加迅速降低。由圖5(b)可知,隨著基線距離的增加,雙基地協同工作模式下擴展面積先增加后減小,基線距離為1.8時,擴展面積達到最大值,為吊放聲吶單獨工作覆蓋范圍的1.93倍,基線距離在1.1~2.2范圍內,擴展面積均大于吊放聲吶獨立工作面積,在該基線范圍內協同雙基地工作均可獲得搜索面積優勢。
(a) 艦載聲吶與吊放聲吶雙基地工作覆蓋范圍對比,SL=220 dB
(b) 歸一化雙基地擴展面積比,SL=220 dB
圖6 雙基地工作范圍和擴展面積比(SL=220 dB)
Fig.6 Operation region and extended area ratio of bistaic sonar (SL=220 dB)
當艦載聲吶聲源級高于機載吊放聲吶聲源級較大時,雙基地協同工作模式在較大的基線分布范圍內相對于艦載聲吶和機載吊放聲吶獨立工作均有搜索范圍優勢,在優勢基線范圍內擴展面積比先增加后減小,而當艦載聲吶聲源級高于機載吊放聲吶聲源級較小時,雙基地協同工作模式搜索范圍優勢逐漸減小,甚至喪失。
(a) 艦載聲吶與吊放聲吶雙基地工作覆蓋范圍對比,SL=210 dB
(b) 歸一化雙基地擴展面積比,SL=210 dB
圖7 雙基地工作范圍和擴展面積比(SL=210 dB)
Fig.7 Operation region and extended area ratio of bistaic sonar (SL=210 dB)

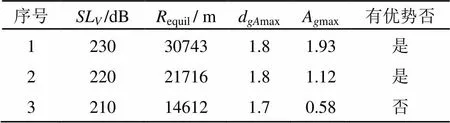
表1 參數對比
3 結語
本文從能量關系出發分析了艦載聲吶與航空吊放聲吶協同雙基地工作時的覆蓋范圍,給出了覆蓋面積的理論計算公式,比較了該工作模式與艦載聲吶和機載吊放聲吶獨立工作的優勢,仿真結果表明,當艦載聲吶聲源級相對于吊放聲吶聲源級足夠大時,雙基地協同工作模式在較大的基線分布范圍內不僅在搜索范圍上優于單基地聯合搜潛,而且在搜索寬度上也有優勢,當艦載聲吶聲源級為230 dB時協同雙基地工作最大擴展面積可達到吊放聲吶獨立工作搜索面積的1.93倍。但艦載聲吶聲源級不夠高時,雙基地協同工作模式搜索范圍優勢喪失,當艦載聲吶聲源級為210 dB時的協同雙基地工作最大擴展面積僅為吊放聲吶獨立工作搜索面積的0.58倍。本文假設目標強度在空間上是各向均勻的,關于水下目標強度對艦機雙基地協同工作的影響需要進一步的研究。
[1] 楊麗, 蔡志明. 雙基地聲吶探測范圍分析[J]. 兵工學報, 2007, 28(7): 839-843.
YANG Li, CAI Zhiming. An analysis on the detectable region for bistatic Sonars[J]. Acta Armamentarii, 2007, 28(7): 839-843.
[2] 凌青,楊麗,蔡志明. 雙(多)基地聲吶浮標系統在反潛中的應用研究[J]. 海軍工程大學學報, 2006, 18(2): 47-51.
LING Qing, YANG Li, CAI Zhiming. Application of bistatic(multistatic) sonar array on anti submarine[J]. Journal of Navy University of Engineering, 2006, 18(2): 47-51.
[3] 楊日杰, 何友, 孫明太. 主/被動聯合多基地航空搜潛范圍分析[J].航空學報, 2004, 25(4): 381-384.
YANG Rijie, HE You, SUN Mingtai. Analysis for active/passive combined multi-base air anti-submarine[J]. Acta Aeronautica et Astronautica Sinica, 2004, 25(4):381-384 .
[4] 楊麗, 蔡志明. 混響背景下雙基地聲吶的探測范圍分析[J].哈爾濱工程大學學報, 2006, 27(4): 597-602.
YANG Li, CAI Zhiming. Analysis of detectable region for the bistatic sonar in reverberation background[J]. Journal of Harbin Engineering University, 2006, 27(4): 597-602.
[5] 顧曉東, 邱志明, 袁志勇. 多基地聲吶接收機最優布陣的探討.兵工學報, 2008, 29(3): 287-290.
GU Xiaodong, QIU Zhiming, YUAN Zhiyong. A study of optimal array distribution for multistatic sonar receiver[J]. Acta Armamentarii, 2008, 29(3): 287-290.
[6] 李襄, 孫長瑜, 余華兵, 等. 多基地聲吶配置策略研究.兵工學報,2009, 30(6):844-848.
LI Xiang, SUN Changyu, YU Huabing, et al. Research on the deployment strategy of multistatic sonar[J]. Acta Armamentarii, 2009, 30(6):844-848.
[7] NGATCHOU P N, FOX W L J, El-Sharkawi M A. Multiobjective multistatic sonar sensor placement[C]//2006 IEEE Congress on Evolutionary Computation, CEC 2006, July 16,2006-July 21,2006. Vancouver, BC, Canada: Inst. of Elec. and Elec. Eng. Computer Society, 2006: 2713-2719.
[8] ERDINC O, WILLETT P, Coraluppi S. Multistatic sensor placement: A tracking approach[C]//2006 9th International Conference on Information Fusion, FUSION, July 10, 2006-July 13, 2006. Florence, Italy: Inst. of Elec. and Elec. Eng. Computer Society, 2006.
[9] THARMARASA R, LANG T, KIRUBARAJAN T. Joint path planning and sensor subset selection for multistatic sensor networks[C]//Signal and Data Processing of Small Targets 2008, March 18, 2008-March 20, 2008. Orlando, FL, United states: SPIE, 2008: 6969, The International Society for Optical Engineering (SPIE).
Search area of cooperative bistatic system consisting of shipboard sonar and aerial dipping sonar
HAN Jian-hui1,2, YANG Ri-jie2, ZHENG Xiao-qing2, LI Da-wei2
(1. College of Marine Engineering, Northwestern Polytechnic University, Xi’an 710072, Shaanxi, China;2. Department of Electronic Information Engineering, Naval Aeronautical Astronautical University, Yantai 264001, Shandong,China)
Aim at the operation problem of heterogeneous sensor bistatic system consisting of shipboard sonar and dipping sonar, a bistatic search model based on the sonar equation under ocean ambient noise is established. In the bistatic cooperative system, both shipboard sonar and dipping sonar receive underwater target echo signal, but the detection signal is transmitted by shipboard sonar. Based on energy relationship, the extended search area, range and equivalent radius of bistatic cooperative system consisting of shipboard sonar and aerial dipping sonar are modeled. Influences of factors such as source level and baseline length on the search area of the system are analyzed. Simulation results show that when source level of shipboard is high enough compared with dipping sonar, the bistatic cooperative system outperforms monostatic cooperative system not only in search area but also in search width.
bistatic sonar, searching area, aerial dipping sonar, shipboard sonar
TB566
A
1000-3630(2016)-02-0114-06
10.16300/j.cnki.1000-3630.2016.02.006
2015-05-04;
2015-08-04
國家自然科學基金(61271444)、“泰山學者”建設工程專項經費資助項目(2011)
韓建輝(1981-), 男, 安徽肥東人, 講師, 博士后, 研究方向為水聲對抗、水聲信號處理。
韓建輝, E-mail:hanjianhui01@163.com