抓斗挖泥船定深平挖控制器研究與設計
2016-09-05 02:22:51周振燕仇文峰
中國港灣建設 2016年5期
關鍵詞:深度
周振燕,杜 謙,仇文峰
(中交疏浚技術裝備國家工程研究中心有限公司,上海 201208)
抓斗挖泥船定深平挖控制器研究與設計
周振燕,杜謙,仇文峰
(中交疏浚技術裝備國家工程研究中心有限公司,上海201208)
在分析抓斗機自動控制需求的基礎上,重點分析了疏浚控制中抓斗在定深和平挖兩種工況下抓斗插入深度、抓斗提升和開閉速度等參數,提出兩個自動控制器的總體方案,最終對其進行了仿真計算。
抓斗;自動控制;定深;平挖
0 引言
二十一世紀是海洋資源開發的新世紀,世界各國把開發海洋、發展海洋經濟和海洋產業作為國家發展的戰略目標。
本文研究大型抓斗挖泥船定深挖泥和平挖挖泥自動控制技術,設計自動控制器。此項成果將填補我國在此項領域的空白,對打破國外壟斷,提高自身競爭力具有深遠意義。
1 控制器總體方案設計
1.1定深控制器總體方案設計
為避免超深超挖,需要自動控制抓斗在指定的深度開始挖掘。抓斗在定深工況模式下工作時,設計人員必須預先設置好抓斗的挖泥深度。當抓斗下降到預先設定的深度后,就根據控制器指令自動減速下降,直到抓斗完全按照預先設定的速度進入泥土直至停止。抓斗斗口完全閉合,即抓斗定深工作完成,抓斗根據控制器指令自動進入提升動作,到達加速提升點后,通過提升手柄抓斗加速提升,直至達到卸泥高度進行卸泥。抓斗定深挖泥流程如圖1所示。
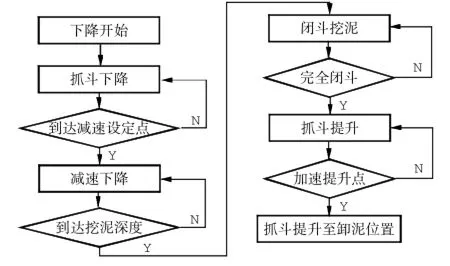
圖1 定深挖泥控制流程圖Fig.1 Flow chart for fixed-depth dredging
在抓斗進行定深挖泥的過程中,為了保護抓斗控制器不過載,系統對以下參數需要預先設定:抓斗下放挖泥的深度、上限停止點、下限停止點、減速位置等。在設定參數時,要根據抓斗電機的實際功率及受到的各種阻力來確定。
1.2平挖控制器總體方案設計
為使挖掘后海床面盡可能平坦,需要通過抓斗的提升與開閉聯動控制,使斗的齒尖運動軌跡在斗閉合期間垂直深度保持不變。平挖控制模式下,需要事先設置抓斗的挖泥深度以及在抓斗閉斗過程中鋼絲繩的補償位移。抓斗下降到達預先設定的深度后進行閉斗工作,抓斗鋼絲繩和油缸行程的數據實時送往控制器與事先存儲的理論數值進行比較,計算得出鋼絲繩對應的放纜量,及時給圓盤制動器發出工作指令,使抓斗鋼絲繩的運動隨著抓斗開閉動作實時調節,使抓斗挖掘后泥面接近平整狀態。抓斗平挖挖泥流程如圖2所示。
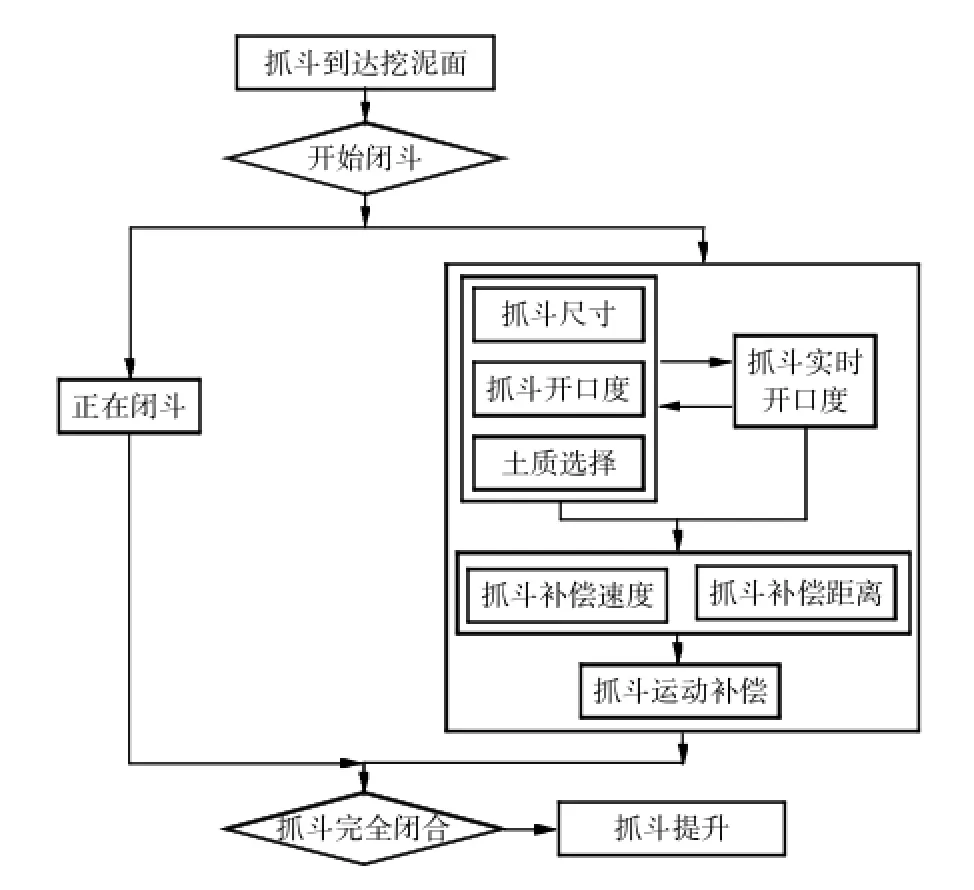
圖2 平挖挖泥控制流程圖Fig.2 Flow chart for flat dredging
自動控制PLC用于抓斗機定深及平挖控制器系統,各種開關量、模擬量信號配置在控制系統中實現自動控制器的正常運行。通過采用變頻調速矢量控制技術,控制抓斗起升電機以及液壓系統運動,實現抓斗上升下降與開閉的功能[1-5]。
2 疏浚土壤特性及控制器的參數分析
在挖泥過程中,抓斗受力主要有抓斗自重、抓斗與疏浚土間的摩阻力及鋼絲繩對抓斗的拉力等。
2.1初始插入深度計算

抓斗切入泥土深度計算公式:式中:G為抓斗質量,kg;Vg為抓斗下落速度,m/s;g為重力加速度,m/s2;l'為斗刃的計算周長,cm;δ0為刃口的厚度,cm;q0為單位挖掘阻力,kg/cm2。
2.2定深控制器設計
通過對抓斗定深挖泥過程的詳細分析,明確了在設計定深控制器時一系列參數設定的原理。抓斗在下降過程中要設定減速位置,減速位置的設置是在減加速度一定的情況下,按照設定的“挖泥深度”為基準反向設定。

式中:S為減速點;a為起升加速度;t為起升時間。
為了求在定深工況下刃口軌跡曲線,本文以200 m3抓斗為例,參考抓斗尺寸(圖3),x為油缸行程,兩個旋轉軸之間的距離b=7 600 mm,R= 1 200 mm,閉斗角度α=53.2°,L=6 344.6 mm,當x=8 800 mm時,抓斗完全閉合,當x=5 800 mm時,抓斗完全打開。

圖3 抓斗結構圖Fig.3 Structural diagram of a grab
抓斗到達挖泥面后,鋼絲繩保持不動狀態,為了得到抓斗在挖掘時刃口的挖掘曲線y,在電機不過載情況下,選取合適的油缸勻速運動速度v,s表示油缸在抓斗閉合過程中的位移,建立定深運動方程:
在抓斗閉合過程中,將抓斗實時開閉角度輸入控制器中,通過角度與時間差計算得到抓斗的開閉速度vk,其中θ如圖3所示。
在抓斗挖泥過程中,不同的開閉速度對應著不同的挖掘曲線,而開閉速度受到抓斗油缸速度、挖掘阻力等因素的影響。在抓斗閉合過程中,考慮到電機等因素的影響,要選取合適的挖掘速度。
在抓斗提升時,抓斗的起升重量為抓斗的自重與土重之和,起升加速度a的選擇要確保起升電機在額定功率之內。
2.3平挖控制器設計
平挖與定深工況類似,都是根據電機的固有功率選擇合適的起升及開閉速度,差別在于,平挖工況時,抓斗在閉斗過程中,鋼絲繩要時刻根據油缸的運動上下調節,以確保挖掘平面的精度。
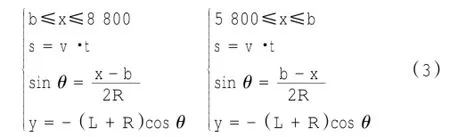
在平挖工況下,抓斗閉合過程中,鋼絲繩時刻進行位移補償,考慮到電機不得過載,選取合適的油缸勻速運動速度v,s表示油缸在抓斗閉合過程中的位移,其中參數θ如圖3,為了得到抓斗在挖掘時鋼絲繩的位移補償曲線y,建立平挖運動方程式(5)。抓斗的開閉速度vk計算同式(4)。
在抓斗平挖閉合過程中,為了實時得到抓斗運動狀態,通過計算抓斗實時開口度yl來顯示抓斗的實時位置。抓斗開口度函數為:
式中:l為刃口到軸的距離。
在抓斗平挖挖泥時,不同的開閉速度對應不同的位移補償曲線,而開閉速度受到抓斗油缸速度、挖掘阻力等因素影響。在抓斗閉合過程中,考慮到電機等因素影響,要選取合適的挖掘速度。在實際工作中,通過開口度的計算,使操作更加明了。在抓斗開口度為0時,考慮到起升電機因素,設定合適的起升加速度α提升抓斗。
3 定深平挖模型仿真
3.1定深運動仿真曲線
在開閉電機功率允許的范圍內設置油缸運動速度,取油缸速度為9 m/min,可以得出抓斗在定深挖泥時的運動軌跡及速度時間曲線,如圖4、圖5所示。可以看到,抓斗在閉斗工作時刃口最大深度為2 500 mm,最后閉合時的深度為1 400 mm;在閉合過程中,速度始終都在變化,抓斗工作后在海床上形成了高達2 500 mm的不平整度。
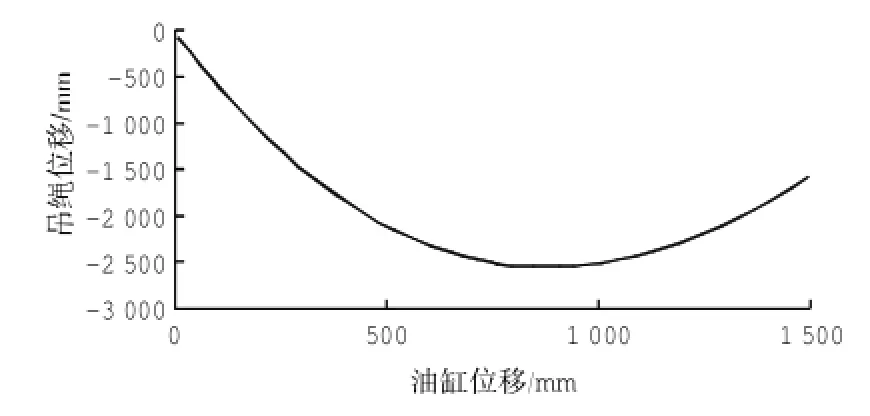
圖4 定深挖挖掘軌跡曲線Fig.4 Track curve of fixed-depth dredging
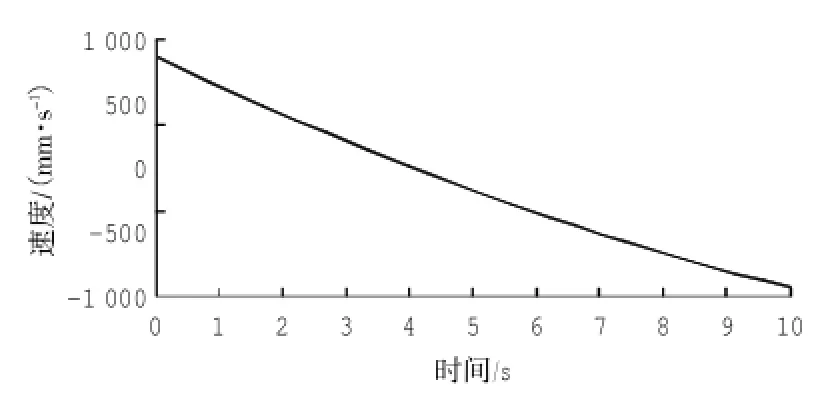
圖5 定深挖挖掘速度曲線Fig.5 Speed curve of fixed-depth dredging
3.2平挖運動仿真曲線
在開閉電機功率允許的范圍內設置油缸運動速度,取油缸速度為9 m/min,可以得出抓斗在平挖挖泥時的位移補償曲線以及加速度時間曲線,如圖6、圖7所示。
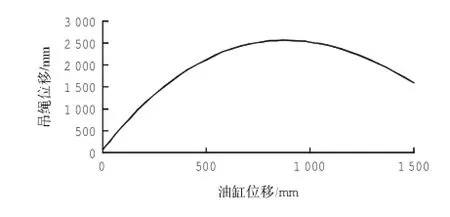
圖6 平挖位移補償曲線Fig.6 Deviation compensation curve of flat dredging
抓斗在閉斗工作時鋼絲繩提升最大高度為2 500 mm,最后抓斗閉合時的提升高度為1 400 mm,與圖4正好相反。同樣在閉合過程中,速度始終都在變化,通過速度與加速度曲線的分析,可看出選擇的油缸速度是否超出開閉電機的功率范圍,從而起到保護電機的作用。開口度曲線顯示了抓斗的開口度與時間的關系,可直觀看出抓斗位置信息。
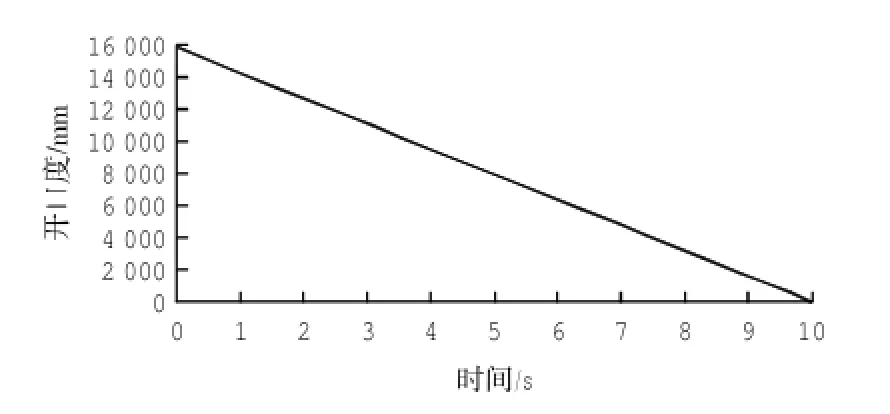
圖7 抓斗開口度Fig.7 Opening of clamshell
4 結語
在分析抓斗機自動控制需求的基礎上,重點分析了疏浚控制中抓斗在定深和平挖兩種工況下抓斗插入深度、抓斗提升和開閉速度等參數,提出了定深挖泥和平挖挖泥兩個自動控制器的總體方案,設計自動控制器,最終對其進行了仿真計算研究成果具有實用價值。
[1]肖漢斌,張永濤,路世青,等.疏浚抓斗平挖運動研究與仿真[J].武漢理工大學學報:交通科學與工程版,2013,37(3):482-485,490.
XIAO Han-bin,ZHANG Yong-tao,LU Shi-qing,et al.Research and simulation on flat dredging kinematics of dredging clamshell [J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2013,37(3):482-485,490.
[2]朱也夫.抓斗卸船機抓斗軌跡優化及控制策略的研究[D].大連:大連海事大學,2010.
ZHU Ye-fu.Optimization and control strategy of grab running path for grab ship unloader[D].Dalian:Dalian Maritime University, 2010.
[3]繆袁泉,田雨,張紅升,等.抓斗挖泥船抓斗機自動控制技術[J].中國港灣建設,2014(12):47-50.
MIAO Yuan-quan,TIAN Yu,ZHANG Hong-sheng,et al.Automatic control technologies for grab machine of grab dredger[J]. China Harbour Engineering,2014(12):47-50.
[4] 滕雪剛.港口起重機抓斗測試系統及控制策略研究[D].武漢:武漢理工大學,2012.
TENG Xue-gang.Test system and control strategy of the grab of port crane[D].Wuhan:Wuhan University of Technology,2012.
[5] 黃晨君.橋式抓斗卸船機電氣控制系統的研究[D].武漢:武漢理工大學,2007.
HUANG Chen-jun.Researching the electrical control system of the bridge-type grab ship unloader[D].Wuhan:Wuhan University of Technology,2007.
Research and design of controller for fixed depth dredging and flat dredging for a grab dredger
ZHOU Zhen-yan,DU Qian,QIU Wen-feng
(CCCC National Engineer Research Center of Dredging Technology and Equipment Co.,Ltd.,Shanghai 201208,China)
On the basis of analysis of automatic control requirements of a grab,the paper focuses on the parameters for the digging depth,hoisting speed and open and close speed of the dredging grab in the fixed depth dredging and flat dredging in dredging control process.An overall scheme for two automatic controllers was proposed,which was eventually simulated.
grab;automatic controller;fixed depth dredging;flat dredging
U615.351
A
2095-7874(2016)05-0073-04
10.7640/zggwjs201605018
2015-12-21
工信部高技術船舶科研項目計劃資助(工信部聯裝)([2012]539)
周振燕(1988— ),女,上海市人,工程師,電氣工程及其自動化專業。E-mail:zhouzhenyan@CCCC-drc.com
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57