基于九軸MEMS定位系統誤差分析與補償算法研究*
2016-09-02 13:37:47朱勤翔楊曉輝上海交通大學區域光纖通信網與新型光通信系統國家重點實驗室上海000國網河南省電力公司電力科學研究院河南鄭州45005
傳感器與微系統 2016年6期
關鍵詞:系統
張 港,朱勤翔,郭 薇,楊曉輝(.上海交通大學區域光纖通信網與新型光通信系統國家重點實驗室,上海000;.國網河南省電力公司電力科學研究院,河南鄭州45005)
基于九軸MEMS定位系統誤差分析與補償算法研究*
張港1,朱勤翔1,郭薇1,楊曉輝2
(1.上海交通大學區域光纖通信網與新型光通信系統國家重點實驗室,上海201100;2.國網河南省電力公司電力科學研究院,河南鄭州450052)
基于九軸MEMS定位系統,對由陀螺儀零偏造成的位移平面偏轉誤差進行分析與補償。通過實驗與推導,首次給出偏差的定量分析和誤差傳播的數學模型。為估計偏差,設計了一種新的狀態向量中僅包含陀螺儀零偏的、簡化擴展卡爾曼濾波(SEKF)技術,克服了無加速度計輔助條件下的偏差估計問題,降低了計算量,能夠很好地滿足位移實時估計需求。硬件實驗證明:經過偏差補償的九軸MEMS定位系統,能夠準確估計有限范圍內周期性運動的位移,幅值定位精確度達到90%。該系統可用于無人機、機器人定位等領域。
九軸MEMS定位系統;誤差分析;陀螺儀偏差估計;簡化擴展卡爾曼濾波器
0 引言
不依賴全球定位系統(GPS)的慣性導航定位是公認的世界難題。一是由于加速度信號本身的直流偏差的存在,經過二次積分之后位移軌跡會迅速發散;二是加速度計容易受扭轉干擾,必須去除扭轉分量才能對其信號進行積分。Woodman O[1]分析了MEMS加速度計信號二次積分后,位移誤差與時間平方呈正比;Foxlin[2]將MEMS應用于行人位置追蹤,通過在擴展卡爾曼濾波(EKF)中周期性將速度置零來打破誤差隨時間積累;邵穎彪等人[3]設計了一種測量導線舞動的九軸MEMS定位系統,考慮了扭轉運動對加速度信號造成的影響(舞動中通常同時包含平動和扭轉運動),由于舞動中真實平動加速度信號具有周期性,其直流偏差可以通過濾波予以消除,從而避免軌跡快速發散。
本文基于九軸MEMS系統,研究有限空間內的周期性運動的定位追蹤,重點考察陀螺儀零偏的誤差傳播過程和對估測位移造成的影響,創新性地提出一種簡化的基于EKF的新算法—SEKF來估計偏差,實驗證明:該算法能夠很好地消除還原位移中因陀螺儀零偏造成的時變偏差,適用于無人機、機器人定位等領域。
1 九軸系統的位移平面旋轉偏差
九軸MEMS系統[3]如圖1所示。通過仿真,觀測因陀螺儀零偏造成的偏差。仿真中各傳感器讀數模型為

式中na,t,nm,t,nω,t為白噪聲;ra,t,rm,t,rω,t為抖動噪聲;ba,bm,bω為常量偏差;各噪聲方差用阿倫方差技術[4]求出。加速度at和角速度ωt由預先設定好的軌跡給出。

圖1 九軸系統還原流程Fig 1 Reduction flowchart of nine-axis system
如圖2,運動軌跡設定為導線截面YZ平面內的橢圓形,位移運動頻率為1 Hz,測量點同時繞傳感器坐標系X軸扭轉,扭轉角度按正弦規律變化。

圖2 仿真軌跡示意圖Fig 2 Diagram of simulated trajectory
九軸系統還原軌跡如圖3所示,從圖中可見還原軌跡有明顯變形和偏移,且具有時變的特點。仿真發現,在不添加陀螺儀偏差bω的情況下,九軸系統的還原軌跡與真實軌跡十分接近,僅有小幅度偏移,如圖4,而去除其他噪聲對結果影響不明顯。這說明,導致九軸系統產生圖3的時變偏差的主要誤差源是陀螺儀偏差bω。

圖3 九軸系統還原軌跡與真實值對比Fig 3 Comparison of nine-axis system reduction trajectory with true trajectory
2 九軸系統的誤差傳播
為了定量地分析九軸系統的誤差傳播過程,假設t時刻,平動加速度為at,扭轉為Rt則在不考慮向心加速度的情況,加速度計的讀數為

圖4 九軸系統還原軌跡與真實值對比(bω=0)Fig 4 Comparison of nine-axis reduction trajectorywith true trajectory(bω=0)

式中g=[0 0 9.8]T;Rt為t時刻測量點的扭轉。由于傳感器噪聲和偏差的存在,從六軸算法得到的扭轉矩陣Rest,t和真實值Rt有一定差距。從式(5)可以看到,得到的加速度aest,t由兩項構成,ΔRt(g+at)代表扭轉矩陣的的估計誤差對加速度造成的傳播誤差。

下面推導ΔRt關于bω的表達式。旋轉矩陣與角速度的關系如式(6)[5]

式中ωt×為叉乘算子。式(6)有解析解[6]式(8),其中,Θ(t,tk)滿足式(9)、式(10)

假設ωt在tk~tk+1區間內為常數ωk+1,則由式(9)可得零階積分因子式(11)
Θ(tk+1,tk)=exp(Ω(ωk+1)Δt)(11)代入到式(6)中得到式(12)
式中Rt1=I3×3。考慮陀螺儀讀數為真實值加上偏差bω,將其代入可得扭轉矩陣的估計誤差式(13)


類比式(14)和式(6)可以看出,Rerr,t相當于是以常角速-bω在做旋轉得到的扭轉矩陣,與實際扭轉角速度無關。進一步可得到ΔRt與bω的關系式(15)

從式(16)看出,當t比較小時,ΔRt是bω關于時間的正比例函數,這是圖3中時變偏差呈線性趨勢的主要原因


3 bω的估計與補償
結合前面的分析可知,只要能夠補償bω,九軸系統得到的加速度就能逼近真實值,進而得到逼近真值的位移軌跡。本節給出兩種bω估計方法。
3.1基于低通濾波的偏差估計
考慮扭轉頻率在0.1~3 Hz(比如監測導線舞動時,九軸單元隨測量點周期性扭轉),可直接計算陀螺儀測量值的均值予以補償。然而隨著時間的增加,當前讀數對偏差的更新貢獻越來越小,難以滿足時變特點。針對于此,提出式(18)的基于低通濾波的改進方法

式中N為常數。
圖5給出了偏差估計的響應曲線,初始估計偏差設為0,經過一段時間后各組均收斂到真實值。
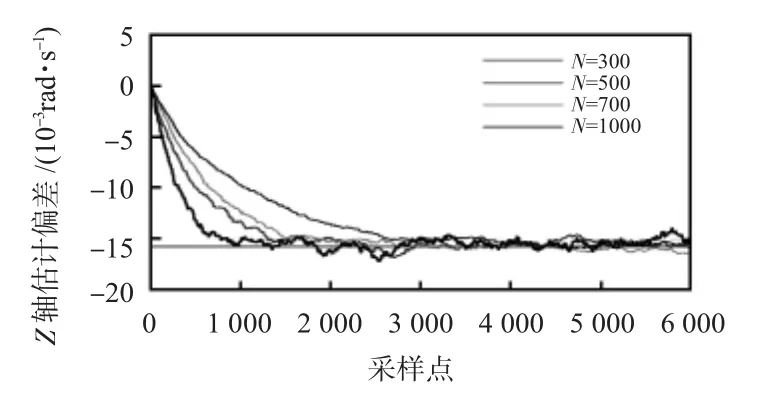
圖5 偏差估計響應曲線(Z軸)Fig 5 Bias estimation response curve(Z axis)
3.2基于SEKF的偏差估計
當實際扭轉為非周期性時,不能通過低通濾波估計零偏。在平動加速度近似為零的情況下,常見的估計陀螺儀偏差方法有融合加速度計、磁力計構建非線性EKF[7]、無跡卡爾曼濾波(UKF)[8],補償濾波(CF)[9]等。由于平動加速度近似為零的假設與定位需求矛盾,只能考慮融合磁力計;另一方面,基于卡爾曼的算法中,陀螺儀偏差僅僅是狀態向量的一部分,為了估計偏差須進行大量的計算,為此,本節推導一種新的狀態向量中只包含陀螺儀偏差的SEKF。
定義從k-1到k時刻扭轉四元數增量

式中δq=[δq2δq3δq4]T,

對于磁力計有
將式(23)展開,忽略δq的二階小量



對于陀螺儀有

結合式(26)、式(27)得到bω的觀測方程(觀測噪聲未顯式地給出)

再結合bω的動力學方程即可搭建KF來估計陀螺儀偏差(具體更新過程文獻[7])。
4 硬件實驗與結果分析
九軸 MEMS單元:加速度計 MMA8451Q,磁力計MAG3110和陀螺儀FXAS21002C;Zig Bee CC2530;以單目測量系統[10]為參照(最大誤差1cm)。在舞動試驗機上進行的三組試驗:第一組未進行陀螺儀偏差補償;二組和三組采用式(18)和基于SEKF進行偏差補償。
實驗結果如圖6所示。從圖6(a)可見未進行陀螺儀偏差補償時,九軸系統還原得到的位移有明顯的時變偏差,與仿真結果和理論推導一致。而二組和三組(圖6(b)和圖6(c)),由陀螺儀偏差造成的時變誤差明顯消除了。從表1中可以看到,基于低通的校正以后位移幅值誤差最小7.74%左右,最大13.84%,基于SEKF的最小9.51%,最大9.69%;各組頻率誤差均在1%以內。

圖6 還原軌跡對比Fig 6 Reduction trajectory constrast
5 結論
本文基于九軸系統,通過仿真實驗和推導,證明了影響位移還原精度的主要噪聲源為陀螺儀零偏,零偏的存在會使還原軌跡產生嚴重的時變誤差,短時間內為位移平面的線性旋轉偏差。SEKF算法能夠較好地估計陀螺儀偏差,從而消除位移中的時變誤差,使位移幅值還原精度提高到90%。

表1 九軸系統幅值與頻率誤差對比Tab 1 Amplitude and frequency error contrast of nine-axis system
[1]Woodman O.An introduction to inertial navigation[R].Cambridge:University of Cambridge,2007.
[2]Foxlin E.Pedestrian tracking with shoe-mounted inertial sensors[J].IEEE Computer Graphics and Applications,2005,25(6):38-46.
[3]邵穎彪,楊曉輝,郭薇,等.基于九軸傳感器監測導線舞動的研究方法[J].智能電網,2015,5(1):1-8.
[4]El-Sheimy N,Hou Haiying,Niu Xiaoji.Analysis and modeling of inertial sensors using Allan Variance[J].IEEE Trans on Instrumentation and Measurement,2008,50(1):140-149.
[5]Kuipers J B.Quaternions and rotation sequences[M].Princeton,NJ:Princeton Univ Press,1999:276-277.
[6]Trawny N,Roumeliotis S.Indirect Kalman filter for 3D attitude estimation[R].Minneapolis:University of Minnesota,2005.
[7]Lefferts E J,Markley F L,Shuster M D.Kalman filtering for spacecraft attitude estimation[J].Journal of Guidance,Con-trol,and Dynamics,1982,5(5):417-429.
[8]Crassidis J L,Markley F L.Unscented filtering for spacecraft attitude estima-tion[J].Journal of Guidance,Control,and Dynamics,2003,26(4):536-542.
[9]Foxlin E.Inertial head-tracker sensors fusion by a complementary separate-bias Kalman filter[C]∥Proceedings of VRAIS'96,IEEE,1996:185-194.
[10]敬澤,薛方正,李祖樞.基于單目視覺的空間目標位置測量[J].傳感器與微系統,2011,30(3):125-130.
Study on error analysis and compensation algorithm based on nine-axis MEMS positioning system*
ZHANG Gang1,ZHU Qin-xiang1,GUO Wei1,YANG Xiao-hui2
(1.State Key Laboratory of Advanced Optical Communication Systems and Networks,Shanghai Jiao Tong University,Shanghai 201100,China;2.Electric Power Research Institute,State Grid HAEPC,Zhengzhou 450052,China)
Based on nine-axis micro-electro-mechanical system(MEMS)positoning system,analyze and compensate on displacement plane deflect error caused by gyroscope zero-bias.By experiment and formula derivation,quantitative analysis on deviation is firstly given,and establish a mathematic model for error propagation;to estimate deviation,design a new simplified extended Kalman filtering(SEKF)technology,which has state vector containing gyroscope zero-bias only,overcome the estimation deviation problem without accelerometer,reduce calculations amount,this algorithm can nicely meet the online estimation demand for displacement.By hardware experiment,nine-axis MEMS system can accurately estimate the displacement of cyclical movement in limited range,after bias compensation,the accuracy of magnitude positioning reaches 90%.The system can be used for unmanned aerial vehicle(UAV),robot localization,and other fields.
nine-axis MEMS tracking system;error analysis;gyroscope bias estimation;simplified extended Kalman filter
TP212
A
1000—9787(2016)06—0013—04
10.13873/J.1000—9787(2016)06—0013—04
2015—10—08
國網公司重大科技資助項目(17KJ160101F1002920100);國家重點實驗室自主課題資助項目
張港(1989-),男,河北秦皇島人,碩士,主要從事基于MEMS的導航定位方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
