基于Matlab和Pro/E的凸輪輪廓曲線設(shè)計(jì)及從動(dòng)件運(yùn)動(dòng)學(xué)仿真
2016-08-31 06:55:40肖幫東
制造技術(shù)與機(jī)床 2016年2期
關(guān)鍵詞:設(shè)計(jì)
肖幫東 黃 浩 徐 中
(華中科技大學(xué)機(jī)械科學(xué)與工程學(xué)院,湖北 武漢 430074)
?
基于Matlab和Pro/E的凸輪輪廓曲線設(shè)計(jì)及從動(dòng)件運(yùn)動(dòng)學(xué)仿真
肖幫東黃浩徐中
(華中科技大學(xué)機(jī)械科學(xué)與工程學(xué)院,湖北 武漢 430074)
以實(shí)際工程項(xiàng)目中的直動(dòng)滾子從動(dòng)件盤(pán)形凸輪機(jī)構(gòu)為例,根據(jù)設(shè)計(jì)要求建立凸輪輪廓曲線的數(shù)學(xué)模型,利用Matlab進(jìn)行凸輪輪廓曲線的精確輔助設(shè)計(jì)以及從動(dòng)件的運(yùn)動(dòng)仿真,將生成的凸輪輪廓線上點(diǎn)坐標(biāo)導(dǎo)入Pro/E中,實(shí)現(xiàn)復(fù)雜凸輪的三維建模設(shè)計(jì),為凸輪輪廓設(shè)計(jì)提供了一種簡(jiǎn)便精確的方法。
凸輪輪廓線;Matlab;輔助設(shè)計(jì);Pro/E
凸輪機(jī)構(gòu)是自動(dòng)機(jī)械或自動(dòng)控制裝置中廣泛應(yīng)用的機(jī)構(gòu)之一,是由凸輪、從動(dòng)件推桿和機(jī)架組成的高副機(jī)構(gòu),與其他傳動(dòng)機(jī)構(gòu)相比,凸輪機(jī)構(gòu)具有結(jié)構(gòu)緊湊、傳動(dòng)精度高、動(dòng)力特性好、運(yùn)動(dòng)平穩(wěn)等優(yōu)點(diǎn)[1]。凸輪機(jī)構(gòu)的設(shè)計(jì),關(guān)鍵是獲得精確的凸輪輪廓曲線來(lái)滿(mǎn)足從動(dòng)件各種預(yù)期的運(yùn)動(dòng)規(guī)律,以實(shí)現(xiàn)機(jī)械的自動(dòng)化,而凸輪曲線特性?xún)?yōu)良與否直接影響到凸輪機(jī)構(gòu)的效率、精度以及壽命[2]。
凸輪輪廓曲線的設(shè)計(jì)一般可分為圖解法和解析法,其中圖解法只適用于從動(dòng)件運(yùn)動(dòng)規(guī)律較簡(jiǎn)單,對(duì)凸輪輪廓曲線精度要求不高的場(chǎng)合。解析法則可針對(duì)復(fù)雜的從動(dòng)件運(yùn)動(dòng)規(guī)律建立相應(yīng)的方程,精確地計(jì)算出輪廓線上各點(diǎn)的坐標(biāo),然后把凸輪的輪廓曲線精確地繪制出來(lái)。Matlab是一種科學(xué)計(jì)算軟件,通過(guò)其強(qiáng)大的矩陣處理和繪圖功能[3],利用Matlab編程可進(jìn)行凸輪機(jī)構(gòu)的解析法設(shè)計(jì),并對(duì)從動(dòng)件的運(yùn)動(dòng)規(guī)律(位移、速度、加速度和輪廓線)進(jìn)行仿真繪制,以達(dá)到凸輪輪廓線的精確設(shè)計(jì)。Pro/E具有強(qiáng)大的曲線建模功能[4-5],若將二者相結(jié)合,利用Matlab生成的凸輪輪廓線上點(diǎn)的坐標(biāo),將其導(dǎo)入Pro/E中,即可容易地實(shí)現(xiàn)復(fù)雜凸輪的三維實(shí)體設(shè)計(jì)。
1 凸輪機(jī)構(gòu)運(yùn)動(dòng)的幾何關(guān)系
在進(jìn)行凸輪機(jī)構(gòu)設(shè)計(jì)時(shí),首先要根據(jù)機(jī)構(gòu)的工作要求、實(shí)際工況以及使用場(chǎng)合選定凸輪機(jī)構(gòu)的類(lèi)型,確定凸輪機(jī)構(gòu)從動(dòng)件的運(yùn)動(dòng)規(guī)律,在合理計(jì)算完凸輪的基圓半徑等基本尺寸參數(shù)后,即可進(jìn)行凸輪輪廓曲線的設(shè)計(jì)。為了采用數(shù)字化方法實(shí)現(xiàn)凸輪輪廓曲線的精確設(shè)計(jì),需要進(jìn)行凸輪運(yùn)動(dòng)幾何關(guān)系模型的建立。
1.1凸輪輪廓曲線的解析法設(shè)計(jì)
用解析法設(shè)計(jì)凸輪的輪廓曲線,其基本方法就是根據(jù)從動(dòng)件的運(yùn)動(dòng)規(guī)律和已知的機(jī)構(gòu)參數(shù),推演出凸輪輪廓線的方程式,并精確地計(jì)算出凸輪輪廓線上各點(diǎn)的坐標(biāo)值[6]。但無(wú)論是采用圖解法還是解析法,設(shè)計(jì)凸輪輪廓曲線方法的基本原理都是反轉(zhuǎn)法,即給整個(gè)凸輪機(jī)構(gòu)加上一個(gè)與凸輪轉(zhuǎn)動(dòng)角速度ω大小相等、方向相反的角速度-ω,不影響各構(gòu)件之間的相對(duì)運(yùn)動(dòng),根據(jù)相對(duì)運(yùn)動(dòng)原理,此時(shí)凸輪將固定不動(dòng),從動(dòng)件一方面隨其導(dǎo)路以-ω繞軸轉(zhuǎn)動(dòng),另一方面又相對(duì)其導(dǎo)路按預(yù)定的運(yùn)動(dòng)規(guī)律移動(dòng),從動(dòng)件在這種復(fù)合運(yùn)動(dòng)中,其尖頂始終與凸輪輪廓相接觸,所以在此復(fù)合運(yùn)動(dòng)中,從動(dòng)件尖頂?shù)倪\(yùn)動(dòng)軌跡即為凸輪輪廓曲線。
如圖1所示為偏置直動(dòng)滾子從動(dòng)件盤(pán)形凸輪機(jī)構(gòu)示意圖,將滾子中心B視為尖端從動(dòng)件的尖端,則采用反轉(zhuǎn)法求得的尖端從動(dòng)件盤(pán)形凸輪機(jī)構(gòu)輪廓為滾子從動(dòng)件盤(pán)形凸輪機(jī)構(gòu)凸輪的理論輪廓。設(shè)凸輪以等角速度ω逆時(shí)針回轉(zhuǎn),基圓半徑為r0,滾子從動(dòng)件右偏于凸輪轉(zhuǎn)動(dòng)軸心O,從動(dòng)件要實(shí)現(xiàn)的運(yùn)動(dòng)規(guī)律為s=s(φ)。現(xiàn)以凸輪回轉(zhuǎn)中心建立直角坐標(biāo)系Oxy,當(dāng)凸輪轉(zhuǎn)過(guò)φ角時(shí),滾子中心將外移s=s(φ)至點(diǎn)B′(x′,y′),根據(jù)反轉(zhuǎn)法,將B′繞原點(diǎn)O沿凸輪轉(zhuǎn)動(dòng)的反方向轉(zhuǎn)過(guò)φ角,從動(dòng)件滾子中心B所在位置就是凸輪理論廓線上的一點(diǎn)。根據(jù)繞坐標(biāo)原點(diǎn)轉(zhuǎn)動(dòng)的構(gòu)件上點(diǎn)運(yùn)動(dòng)前后的坐標(biāo)關(guān)系,可得凸輪的輪廓坐標(biāo)為
(1)

(2)
即
(3)
以上所得為凸輪滾子中心運(yùn)動(dòng)軌跡,即理論輪廓線η。以滾子半徑rr為半徑,作一系列的滾子圓,該圓簇的包絡(luò)線即為滾子從動(dòng)件盤(pán)形凸輪的實(shí)際輪廓線η′。理論輪廓線上點(diǎn)B處的法線斜率為

(4)
式中:dx/dφ、dy/dφ可由式(3)求得


(5)
故實(shí)際輪廓線上對(duì)應(yīng)點(diǎn)的坐標(biāo)可按式(6)計(jì)算,式中加減號(hào)用于分別求解滾子圓的內(nèi)外包絡(luò)線。
(6)
1.2基圓與壓力角的設(shè)計(jì)
壓力角α是表征凸輪機(jī)構(gòu)受力情況的一個(gè)重要參數(shù),而凸輪輪廓上不同點(diǎn)處的壓力角各不相同的,凸輪尺寸的大小取決于凸輪基圓半徑的大小,凸輪機(jī)構(gòu)的壓力角與基圓半徑大小直接相關(guān),因此設(shè)計(jì)時(shí)必須加以考慮。
當(dāng)凸輪逆時(shí)針轉(zhuǎn)動(dòng),從動(dòng)件右偏時(shí),壓力角α、偏距e和基圓半徑r0存在著如下關(guān)系:
(7)
為保證凸輪機(jī)構(gòu)正常旋轉(zhuǎn),應(yīng)使最大壓力角αmax小于臨界壓力角αC,則有
(8)
由式(8)可知要確定最小的基圓半徑,就要找到式右邊的最大值[7]。
2 凸輪輪廓曲線的數(shù)學(xué)模型
凸輪的輪廓曲線是由推桿的運(yùn)動(dòng)規(guī)律來(lái)決定的,典型的凸輪輪廓曲線由4 部分組成,即推程、遠(yuǎn)休止、回程和近休止。針對(duì)實(shí)際工程項(xiàng)目中設(shè)計(jì)需要,需對(duì)物料輸送過(guò)程采用凸輪機(jī)構(gòu)實(shí)現(xiàn),現(xiàn)提出該凸輪機(jī)構(gòu)設(shè)計(jì)要求如下所述:
(1)凸輪運(yùn)動(dòng)過(guò)程嚴(yán)格無(wú)沖擊力產(chǎn)生,傳動(dòng)平穩(wěn)。
(2)凸輪外形直徑不能超過(guò)450mm,額定轉(zhuǎn)速為60r/min,逆時(shí)針?lè)较蜣D(zhuǎn)動(dòng)。
(3)從動(dòng)件推出行程為120mm,推出角度范圍為0~180°。
(4)從動(dòng)件的運(yùn)動(dòng)規(guī)律為推程快,回程慢。
進(jìn)行從動(dòng)件運(yùn)動(dòng)規(guī)律設(shè)計(jì)時(shí),應(yīng)從兩方面考慮:一是從動(dòng)件的速度幅值vmax要盡量小;二是從動(dòng)件的加速度幅值αmax要盡量小,且無(wú)突變。結(jié)合表1,綜合考慮該項(xiàng)目中從動(dòng)件的實(shí)際工作情況,在此選用組合擺線運(yùn)動(dòng)規(guī)律。
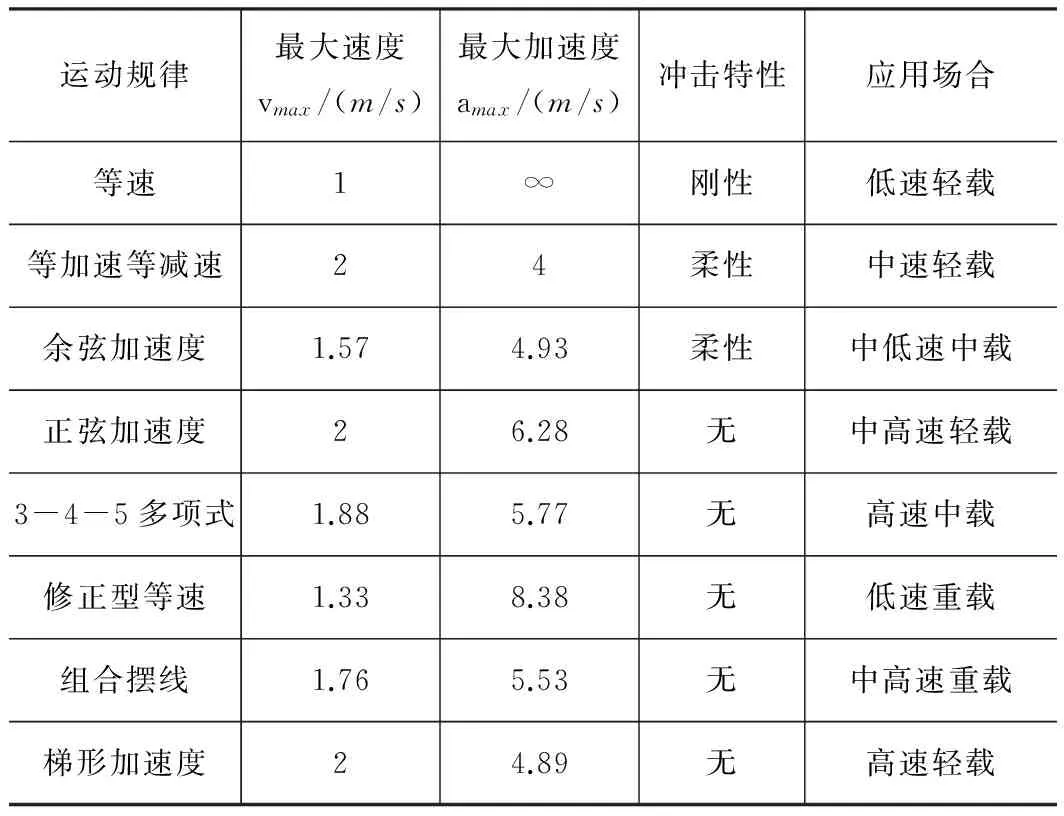
表1 若干種從動(dòng)件運(yùn)動(dòng)規(guī)律特性比較[1]
凸輪機(jī)構(gòu)設(shè)計(jì)時(shí)也采用典型的4部分過(guò)程,按實(shí)際情況,該凸輪機(jī)構(gòu)為直動(dòng)滾子從動(dòng)件盤(pán)形凸輪機(jī)構(gòu)。根據(jù)組合擺線運(yùn)動(dòng)規(guī)律的特點(diǎn),推程階段和回程階段過(guò)程加速度曲線由3段不同時(shí)期的正弦加速度曲線拼接而成,可避免剛性和柔性沖擊。
凸輪機(jī)構(gòu)要求中速重載,故設(shè)計(jì)從動(dòng)件運(yùn)動(dòng)規(guī)律為:
(9)
(1)推程階段從動(dòng)件運(yùn)動(dòng)方程
位移運(yùn)動(dòng)方程:
(10)
速度運(yùn)動(dòng)方程:
(11)
加速度運(yùn)動(dòng)方程:
(12)
式中:Φ為推程運(yùn)動(dòng)角;φ為凸輪的回轉(zhuǎn)角;h為從動(dòng)件的升程;ω為凸輪的旋轉(zhuǎn)角速度;s、v、a分別為凸輪轉(zhuǎn)過(guò)φ角時(shí)從動(dòng)件的位移、速度和加速度。
(2)遠(yuǎn)休止階段從動(dòng)件運(yùn)動(dòng)方程
遠(yuǎn)休止階段凸輪旋轉(zhuǎn)的角度為Φs,此時(shí)從動(dòng)件靜止不動(dòng),其位移仍為h,速度和加速度均為零。
(3)回程階段從動(dòng)件運(yùn)動(dòng)方程
位移運(yùn)動(dòng)方程:
(13)
速度運(yùn)動(dòng)方程:

加速度運(yùn)動(dòng)方程:
(15)
(4)近休止階段從動(dòng)件運(yùn)動(dòng)方程
近休止階段凸輪旋轉(zhuǎn)的角度為Φs′,此時(shí)從動(dòng)件靜止不動(dòng),其位移、速度和加速度都為零。
3 基于Matlab和Pro/E凸輪輪廓曲線的精確設(shè)計(jì)
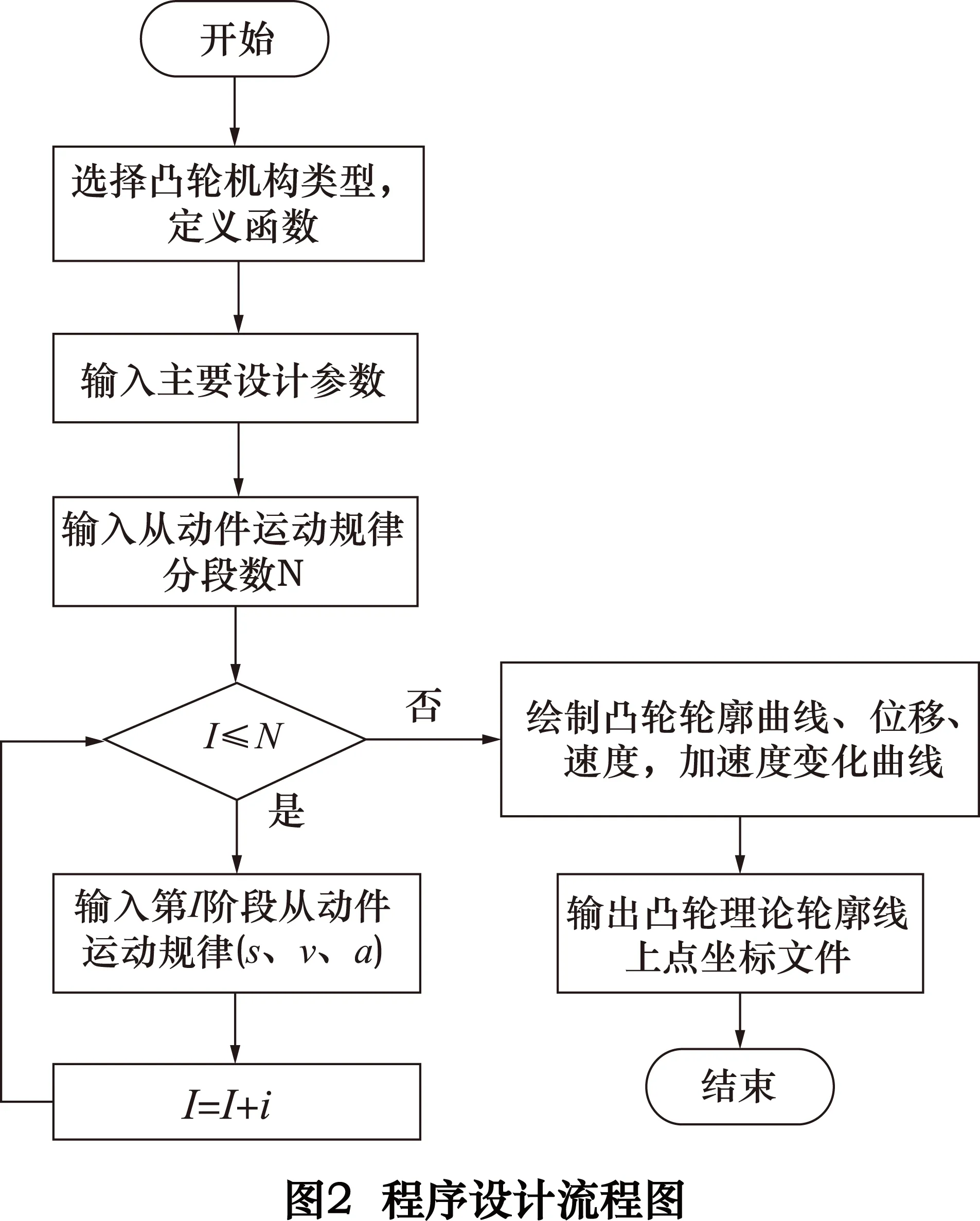
Matlab軟件是一種強(qiáng)大的數(shù)據(jù)處理軟件,利用Matlab軟件進(jìn)行凸輪輪廓曲線的精確輔助設(shè)計(jì)以及從動(dòng)件的運(yùn)動(dòng)仿真,可以大大減小由大量公式帶來(lái)的計(jì)算工作量大的問(wèn)題。為了實(shí)現(xiàn)凸輪的參數(shù)化設(shè)計(jì),便于修改,使用Matlab編程時(shí)借用了M腳本文件編寫(xiě)函數(shù),從而進(jìn)行函數(shù)的調(diào)用。.m文件工作方式將要執(zhí)行的命令直接采用Matlab命令編寫(xiě),全部寫(xiě)在一個(gè)文本文件中,便于對(duì)程序的修改與維護(hù),增強(qiáng)了程序的交互性。最后利用Matlab軟件的繪圖命令繪制凸輪機(jī)構(gòu)的輪廓曲線和從動(dòng)件的位移、速度、加速度曲線,其具體設(shè)計(jì)流程圖如圖2所示。
3.1基于Matlab的凸輪輪廓曲線程序設(shè)計(jì)
根據(jù)實(shí)際工程項(xiàng)目的需求,所設(shè)計(jì)的凸輪為直動(dòng)滾子從動(dòng)件盤(pán)形凸輪機(jī)構(gòu),其工作條件為中速重載,凸輪以等角速度ω=60r/min逆時(shí)針?lè)较蛐D(zhuǎn),基圓半徑r0=70mm,滾子半徑rr=15mm,凸輪的推程運(yùn)動(dòng)角為120°,滾子按組合擺線運(yùn)動(dòng)規(guī)律上升到最遠(yuǎn)處,升程h=120mm;接著滾子不動(dòng),凸輪的遠(yuǎn)休止角為30°;凸輪的回程運(yùn)動(dòng)角為180°,滾子按組合擺線運(yùn)動(dòng)規(guī)律下降至最近處;最后滾子不動(dòng),凸輪的近休止角為30°。
根據(jù)從動(dòng)件的運(yùn)動(dòng)規(guī)律,利用Matlab語(yǔ)言編寫(xiě)程序,以推程和遠(yuǎn)休止階段為例(回程和近休止階段同理),見(jiàn)圖3所示。
%設(shè)置基本參數(shù)符號(hào):de1為推程運(yùn)動(dòng)角;de2為遠(yuǎn)休止角;de3為回程運(yùn)動(dòng)角;de4為近休止角;r0為基圓半徑;h為升程;w為凸輪角速度;S為位移;V為速度;J為加速度;X為理論輪廓線上點(diǎn)的x軸坐標(biāo);Y為理論輪廓線上點(diǎn)的y軸坐標(biāo);Z為理論輪廓線上點(diǎn)的z軸坐標(biāo)
function[X,Y,Z,S]=tl(de1,de2,de3,de4,r0,h,w)
%%升程階段(位移-速度-加速度-點(diǎn)坐標(biāo))
%升程階段1
A1=4*pi^2*h/((4+pi)*de1^2);
S0=r0;
D1=0:0.01:de1/8;
S1=A1*de1/(4*pi).*D1-A1*de1^2/(16*pi^2).*sin(4*pi/de1.*D1);
X1=sin(D1).*(S0+S1);
Y1=cos(D1).*(S0+S1);
Z1=0.*D1;
V1=A1*de1/(4*pi)*w-A1*de1/(4*pi)*w.*cos(4*pi/de1.*D1);
J1=A1*w^2.*sin(4*pi/de1.*D1);
%升程階段2
D2=de1/8:0.01:7*de1/8;
S2=A1*de1^2/(2*pi^2)+A1*de1/(4*pi).*D2-9*A1*de1^2/(16*pi^2).*sin(4*pi/3/de1.*D2+pi/3);
X2=sin(D2).*(S0+S2);
Y2=cos(D2).*(S0+S2);
Z2=0.*D2;
V2=A1*de1/(4*pi)*w-3*A1*de1/(4*pi)*w.*cos(4*pi/3/de1.*D2+pi/3);
J2=A1*w^2.*sin(4*pi/3/de1.*D2+pi/3);
%升程階段3
D3=7*de1/8:0.01:de1;
S3=A1*de1^2/pi^2+A1*de1/(4*pi).*D3-A1*de1^2/(16*pi^2).*sin(4*pi/de1.*D3);
X3=sin(D3).*(S0+S3);
Y3=cos(D3).*(S0+S3);
Z3=0.*D3;
V3=A1*de1/(4*pi)*w-A1*de1/(4*pi)*w.*cos(4*pi/de1.*D3);
J3=A1*w^2.*sin(4*pi/de1.*D3);
%%遠(yuǎn)休止階段(位移-速度-加速度-點(diǎn)坐標(biāo))
D4=de1:0.01:de1+de2;
S4=h.*ones(1,size(D4,2));
X4=sin(D4).*(S0+S4);
Y4=cos(D4).*(S0+S4);
Z4=0.*D4;
V4=0.*ones(1,size(D4,2));
J4=0.*ones(1,size(D4,2));
按照上述程序,運(yùn)行Matlab程序,調(diào)用該函數(shù)tl:
[X,Y,Z,S]=tl(2*pi/3,pi/6,pi,pi/6,0.07,0.12,2*pi)
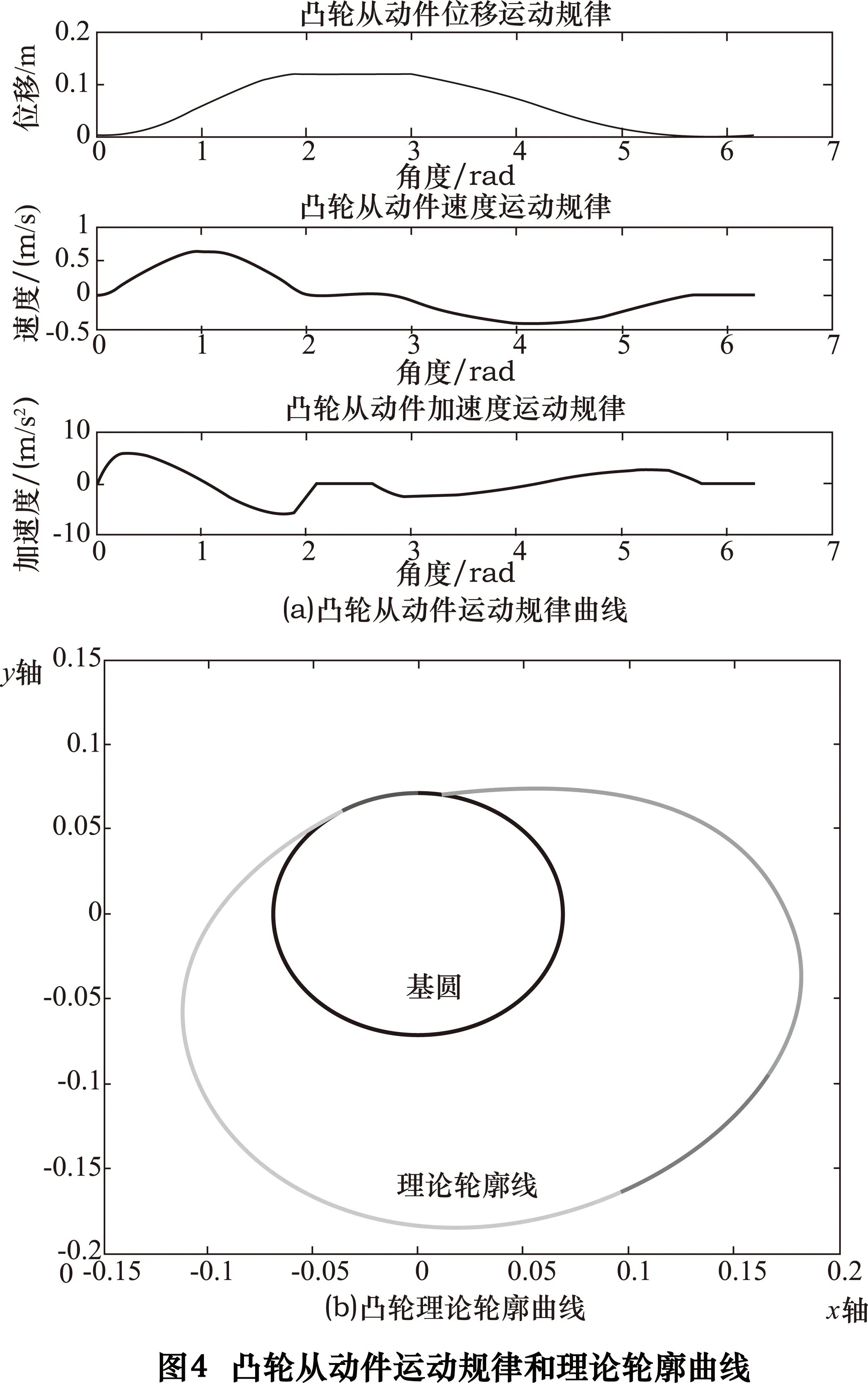
繪制凸輪機(jī)構(gòu)的輪廓曲線和從動(dòng)件的位移、速度、加速度曲線,如圖4所示。
根據(jù)設(shè)計(jì)要求,凸輪運(yùn)動(dòng)軌跡無(wú)沖擊力產(chǎn)生,傳動(dòng)平穩(wěn),凸輪運(yùn)動(dòng)規(guī)律采用組合擺線形式進(jìn)行設(shè)計(jì)運(yùn)行過(guò)程中最大速度0.633 4m/s,最大加速度5.970 2m/s2。如果按照等加速等減速進(jìn)行設(shè)計(jì),起點(diǎn)、中間過(guò)渡和終點(diǎn)處加速度會(huì)出現(xiàn)跳躍,產(chǎn)生沖擊,按這種運(yùn)動(dòng)規(guī)律設(shè)計(jì),其最大速度和最大加速度按下式計(jì)算:
(16)
(17)
計(jì)算得最大速度0.72m/s,加速度4.32m/s2。結(jié)合實(shí)際運(yùn)動(dòng),從動(dòng)件部分慣量還是很大。因此設(shè)計(jì)時(shí)主要按照以下兩個(gè)方面進(jìn)行約束:從動(dòng)件的速度幅值要盡量小;從動(dòng)件的加速度幅值要盡量小,且無(wú)突變。所以權(quán)衡之下,選擇組合擺線形式的運(yùn)動(dòng),無(wú)沖擊出現(xiàn),滿(mǎn)足設(shè)計(jì)要求。
3.2基于Pro/E的凸輪三維實(shí)體設(shè)計(jì)
為了提高凸輪輪廓曲線的設(shè)計(jì)精度和效率,前一節(jié)已根據(jù)凸輪旋轉(zhuǎn)角度和凸輪與從動(dòng)件接觸點(diǎn)位移變化的關(guān)系式計(jì)算模擬得到了凸輪的理論輪廓線,而Pro/E可利用其強(qiáng)大的曲線建模功能,進(jìn)行凸輪輪廓曲線的精確設(shè)計(jì),最終完成凸輪的三維實(shí)體設(shè)計(jì)。
運(yùn)行編制程序后,通過(guò)命令“savetl.iblS-ascii”將理論輪廓線上點(diǎn)的坐標(biāo)保存并生成tl.ibl文件,將Matlab生成的“tl.ibl”文件在記事本中打開(kāi),然后再更改文件的開(kāi)頭,添加幾行Pro/E可讀取的關(guān)鍵字:open;arclength;beginsection;begincurve,如圖5所示。

修改后的tl.ibl文件中保存了理論輪廓點(diǎn)的坐標(biāo),將其導(dǎo)入Pro/E中,即可生成光滑連續(xù)的輪廓曲線。具體步驟為:插入—模型基準(zhǔn)—曲線—自文件,打開(kāi)tl.ibl文件,則生成凸輪理論輪廓曲線,然后把理論輪廓曲線在該點(diǎn)的法線方向左右各偏離滾子半徑距離rr=15mm,即得凸輪工作槽的輪廓曲線,然后通過(guò)拉伸生成凸輪基體,以曲線輪廓切除生成滾子工作的曲線槽,如圖6所示。

4 結(jié)語(yǔ)
凸輪輪廓形狀取決于從動(dòng)桿的運(yùn)動(dòng)規(guī)律,復(fù)雜的運(yùn)動(dòng)形式使得凸輪輪廓線的設(shè)計(jì)變得極為困難,且精度難以達(dá)到實(shí)際要求。通過(guò)Matlab和Pro/E的結(jié)合應(yīng)用,利用已有的理論曲線函數(shù)在Matlab中編程生成點(diǎn)的坐標(biāo),然后導(dǎo)入Pro/E軟件中,生成具有光滑連續(xù)輪廓線的凸輪,從而提高了凸輪三維建模的效率,所建精確三維模型也為后續(xù)凸輪的虛擬裝配、運(yùn)動(dòng)仿真及動(dòng)力學(xué)分析、有限元分析和數(shù)控加工奠定了良好的基礎(chǔ)。
[1]魏兵,喻全余. 機(jī)械原理.2版.武漢:華中科技大學(xué)出版社, 2011.
[2]方芳.基于SolidWorks的平面凸輪設(shè)計(jì)系統(tǒng)研究. 成都:西南交通大學(xué), 2007.
[3]周建新,豈興明.MATLAB從入門(mén)到精通. 2版.北京:人民郵電出版社, 2012.
[4]林清安. 完全精通Pro/ENGINEER零件設(shè)計(jì)基礎(chǔ)入門(mén). 北京:電子工業(yè)出版社, 2010.
[5]王東. 基于Pro/E關(guān)系式的凸輪輪廓曲線精確設(shè)計(jì). 機(jī)械設(shè)計(jì), 2010, 27(8):31-34.
[6]李霞, 劉本學(xué), 張三川. 基于MATLAB軟件的凸輪輪廓曲線設(shè)計(jì)及從動(dòng)件運(yùn)動(dòng)學(xué)仿真. 中原工學(xué)院學(xué)報(bào), 2012, 23(1):41-43,78.
[7]高超樓,張明成. 適用于凸輪機(jī)構(gòu)數(shù)字化設(shè)計(jì)的基圓半徑與偏距的分析. 機(jī)械研究與應(yīng)用, 2008, 21(2):65-67,71.
(編輯譚弘穎)
如果您想發(fā)表對(duì)本文的看法,請(qǐng)將文章編號(hào)填入讀者意見(jiàn)調(diào)查表中的相應(yīng)位置。
DesignofcamprofilecurveandkinematicssimulationbasedonMatlabandPro/E
XIAOBangdong,HUANGHao,XUZhong
(CollegeofMechanicalScienceandEngineering,HuazhongUniversityofScienceandTechnology,Wuhan430074,CHN)
Takingthestraightmovingrollerfollowerdiskshapedcammechanisminapracticalprojectasanexample,accordingtothedesignrequirement,weestablishedthemathematicalmodelofcamcontourcurveandutilizedMatlabtorealizecamprofilecurveofpreciseaideddesignandfollowermotionsimulation,camcontourpointcoordinatesgeneratedwereimportedtoPro/E,Eventually,werealizedthedesignofcomplicatedthree-dimensionalmodelingofthecam.Theprocessprovidesasimpleandaccuratemethodforthedesignofthecamprofile.
camprofile;Matlab;aideddesign;Pro/E
TP391
A
肖幫東,男,1991年生,研究生在讀,主要研究方向?yàn)闄C(jī)電一體化和數(shù)控技術(shù)。
2014-11-13)
160212
*國(guó)家自然科學(xué)基金項(xiàng)目面上項(xiàng)目( 51175207)
猜你喜歡
河北畫(huà)報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
