一種雙模糊PI控制器在PMSM控制系統(tǒng)的研究
2016-08-24 06:55:00徐奔奔周芝峰霍文明楊恩星
電力科學(xué)與工程 2016年7期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
徐奔奔,周芝峰,霍文明,楊恩星
(1.上海電機(jī)學(xué)院 電氣學(xué)院,上海 200230;2.上海電氣輸配電技術(shù)中心,上海 200042)
一種雙模糊PI控制器在PMSM控制系統(tǒng)的研究
徐奔奔1,周芝峰1,霍文明1,楊恩星2
(1.上海電機(jī)學(xué)院 電氣學(xué)院,上海 200230;2.上海電氣輸配電技術(shù)中心,上海 200042)
針對(duì)模糊自整定PI控制器的不足以及永磁同步電機(jī)(PMSM)矢量控制系統(tǒng)的非線性、參數(shù)時(shí)變等特點(diǎn),為進(jìn)一步改善永磁同步電機(jī)控制系統(tǒng)性能,在基本二維模糊PI控制器的基礎(chǔ)上引入了一維模糊控制器,構(gòu)成了一種雙模糊PI控制器。對(duì)所提出的雙模糊PI控制器的輸入輸出關(guān)系進(jìn)行理論推導(dǎo)并進(jìn)行結(jié)構(gòu)解析,得出該控制器是一種非線性的變參數(shù)PID控制器。在SIMULINK中構(gòu)建系統(tǒng)仿真結(jié)構(gòu)框圖,進(jìn)行仿真分析。仿真結(jié)果表明所提出的雙模糊PI控制器使得PMSM具有更好的穩(wěn)態(tài)性能和抗干擾性能。
PMSM;雙模糊PI控制;SIMULINK
0 引言
模糊控制算法結(jié)構(gòu)簡(jiǎn)單,模擬人類的思維方式,將人們?cè)趯?shí)際過(guò)程中獲得的相關(guān)工程經(jīng)驗(yàn),通過(guò)一定語(yǔ)言控制規(guī)則表現(xiàn)出來(lái)[1]。一般地,模糊控制方法不需要建立所研究系統(tǒng)的精確數(shù)學(xué)模型,在處理時(shí)變、非線性等一類復(fù)雜系統(tǒng)上取得了不錯(cuò)的的應(yīng)用效果[2]。以模糊控制方法為代表的諸多先進(jìn)智能控制方法在電機(jī)控制領(lǐng)域也越來(lái)越受到研究學(xué)者的青睞,尤其像永磁同步電機(jī)這類非線性、參數(shù)時(shí)變的系統(tǒng)。自模糊PI參數(shù)自整定技術(shù)提出以后,在永磁同步電機(jī)矢量控制系統(tǒng)得到廣泛應(yīng)用[3,4]。在相關(guān)文獻(xiàn)的參考下,基于模糊PI控制器的原理設(shè)計(jì)了一種雙模糊PI控制器,能有效地減小系統(tǒng)穩(wěn)態(tài)誤差,提高系統(tǒng)穩(wěn)定性,較好地實(shí)現(xiàn)對(duì)非線性系統(tǒng)的控制。
1 模糊控制器原理
經(jīng)典控制理論和現(xiàn)代控制理論的共同點(diǎn)在基于對(duì)模型的控制,依賴被控制對(duì)象精確的數(shù)學(xué)模型[5,6]。模糊控制不需要依賴控制系統(tǒng)的精確數(shù)學(xué)模型,所以對(duì)于一些難以建立數(shù)學(xué)模型的控制對(duì)象或是一些非線性及時(shí)變的復(fù)雜系統(tǒng),模糊控制能取得更好的控制效果。模糊控制器可分為一維、二維及多維模糊控制器,二維模糊控制器的應(yīng)用相對(duì)要廣泛,以控制量及其導(dǎo)數(shù)作為控制器的輸入變量[7-9]。二維模糊控制器一般結(jié)構(gòu)如圖1所示,其設(shè)計(jì)過(guò)程主要包括:精確量的模糊化、模糊控制算法的設(shè)計(jì)、輸出量的模糊判決以及模糊量的精確化。
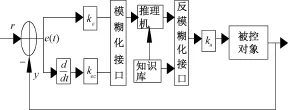
圖1 二維模糊控制器結(jié)構(gòu)框圖
2 雙模糊PI控制器的設(shè)計(jì)
2.1雙模糊PI控制器的設(shè)計(jì)思想
模糊控制理論已經(jīng)被很多研究人員成功地應(yīng)用于許多工業(yè)控制過(guò)程中。模糊控制器的設(shè)計(jì)過(guò)程不需要精確的數(shù)學(xué)模型,適合非線性系統(tǒng)的控制。由于其語(yǔ)言規(guī)則的簡(jiǎn)單化,能使控制對(duì)象獲得較好的動(dòng)態(tài)性能。但是模糊控制器的設(shè)計(jì)大部分依賴主觀因素,模糊參數(shù)的選擇和模糊控制規(guī)則的制定通常依靠豐富的經(jīng)驗(yàn)[10,11]。模糊自整定PID控制器的設(shè)計(jì)相對(duì)傳統(tǒng)PID控制使得永磁同步電機(jī)系統(tǒng)魯棒性、抗干擾性以及動(dòng)態(tài)性能更優(yōu)越,但是在永磁同步電機(jī)矢量控制系統(tǒng)性能精確性要求較高的場(chǎng)合,模糊自整定PID控制也存在一定缺陷。而提出的雙模糊PI控制器主要是針對(duì)消除系統(tǒng)穩(wěn)態(tài)誤差,提高系統(tǒng)穩(wěn)定性為出發(fā)點(diǎn)。由文獻(xiàn)[12]提出幾種復(fù)合型模糊控制器的研究,復(fù)合模糊控制器的中心思想是模糊控制器與傳統(tǒng)PID控制器相互切換工作,這種設(shè)計(jì)雖然理論上可行,但操作起來(lái)較困難,切換的判別閾值難確定。當(dāng)切換到傳統(tǒng)PID控制器時(shí),還是需要掌握控制系統(tǒng)精確的數(shù)學(xué)模型。
在借鑒了復(fù)合模糊控制器的結(jié)構(gòu)特點(diǎn)和PID控制器的功能特點(diǎn)后,設(shè)計(jì)出了一種改進(jìn)的模糊PI控制器。該控制器在普通二維模糊PI控制器的基礎(chǔ)上并聯(lián)了一個(gè)一維模糊控制器,其結(jié)構(gòu)如圖2所示。該雙模糊PI控制器主要是在傳統(tǒng)模糊PI控制器的基礎(chǔ)上做了改進(jìn)。傳統(tǒng)模糊PI控制器一般是二輸入與二輸出形式,輸入量為變化量的偏差及偏差變化率,輸出為比例系數(shù)與積分系數(shù)的整定系數(shù)。傳統(tǒng)模糊PI控制器本質(zhì)上是變系數(shù)的PD控制,缺少積分作用,文獻(xiàn)[13]在普通二維模糊控制器的基礎(chǔ)上,增加了對(duì)偏差信號(hào)直接積分的環(huán)節(jié),結(jié)果顯示,加入積分環(huán)節(jié)后能在一定程度上改善PMSM控制系統(tǒng)的性能,但效果不夠明顯,也缺少理論依據(jù)。對(duì)于二輸入二輸出的二維模糊控制器每個(gè)變量劃分為7個(gè)等級(jí),最多有49條規(guī)則,單輸入模糊控制器輸入變量劃分為8級(jí),有8條規(guī)則,所以雙模糊PI控制器一共有57條規(guī)則。因此,所設(shè)計(jì)的這種雙模糊PI控制器結(jié)構(gòu)并沒(méi)有比通常的二維模糊PI控制器增加太多的語(yǔ)言規(guī)則及其復(fù)雜性,同時(shí)又具有PID控制器良好的穩(wěn)態(tài)性能。雙模糊PI控制器結(jié)構(gòu)框圖如下圖2所示。
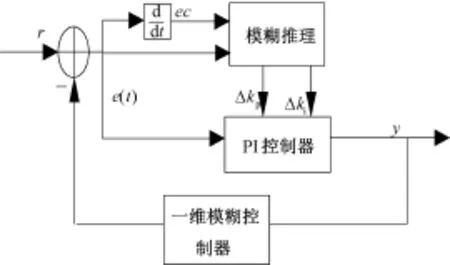
圖2 雙模糊PI控制器結(jié)構(gòu)框圖
2.2雙模糊PI控制器的設(shè)計(jì)原理
從圖3可知,由雙模糊PI控制器的仿真結(jié)構(gòu)圖可以看出,其由一個(gè)二維的模糊PI控制器和一個(gè)一維的模糊控制器構(gòu)成。對(duì)于二輸入二輸出的二維模糊控制器的控制規(guī)則為
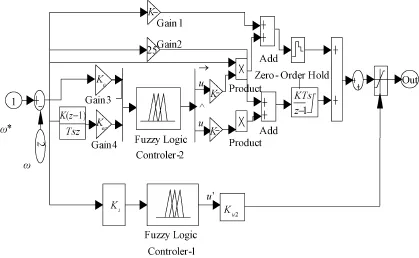
圖3 雙模糊PI控制仿真結(jié)構(gòu)框圖

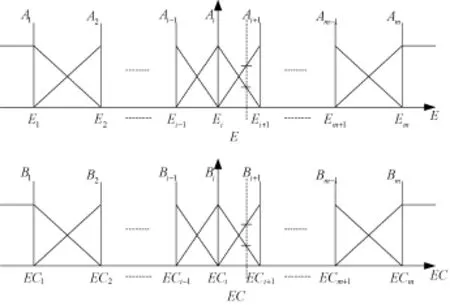
圖4 二維模糊控制器的輸入變量隸屬度函數(shù)圖
給模糊控制器輸入的變量為精確量,經(jīng)過(guò)模糊化與模糊推理得到的控制輸出量也為模糊量,因?yàn)槟:坎荒苤苯佑糜诳刂茖?duì)象,必須經(jīng)過(guò)反模糊化轉(zhuǎn)化成精確量才能用于被控對(duì)象。使用模糊運(yùn)算推理機(jī)制和加權(quán)平均解模糊化方法如下:
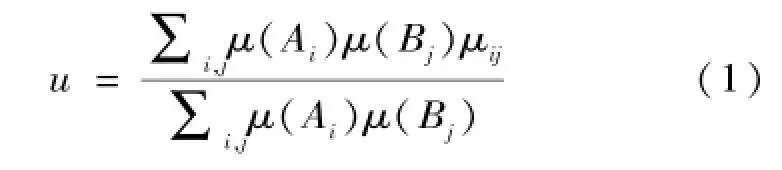
若E∈[Ei,Ei+1],EC∈[ECi,ECi+1],且均為任意區(qū)間,則有如下表達(dá)式
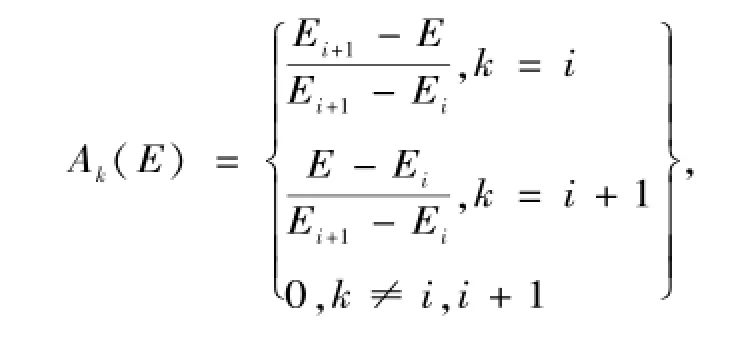
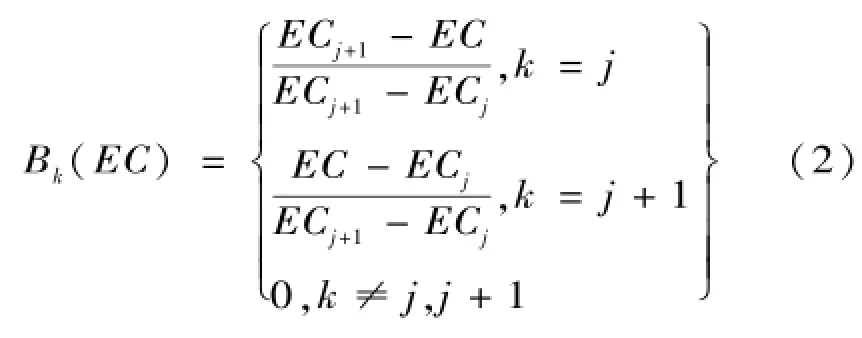
由圖3可知,在二維模糊控制器運(yùn)行時(shí),任何時(shí)候最多只有兩個(gè)隸屬度函數(shù)對(duì)輸入的偏差與偏差變化率有非零值,最多4個(gè)模糊規(guī)則同時(shí)起作用,即上式分母中最多只有4項(xiàng)。
所以,

從而可以得到:

所以可得到輸出變量的關(guān)系表達(dá)式

對(duì)上式兩邊同時(shí)取微分
所以可得:
將公式(6)、(7)帶入公式(5)可得
所以有:


展開(kāi)可得:

類似地可對(duì)單輸入模糊控制器輸入輸出關(guān)系進(jìn)行推導(dǎo),設(shè)單輸入模糊控制器的輸入為E′,
輸出為u′,模糊控制規(guī)則可表示為:

式中:E′=ki×e,ki為單模糊控制器輸入量e到模糊量的量化因子;Ck為單模糊控制器某一時(shí)刻的輸入值;u′k為單模糊控制器某一時(shí)刻的輸出值。類似于二維模糊控制器,一維模糊控制器的輸入也采用三角形隸屬度函數(shù),并且使得隸屬度函數(shù)的相鄰函數(shù)值的和為1,其隸屬度函數(shù)圖類似于上圖3。
同樣單模糊控制器的解模糊化方法也采用模糊運(yùn)算推理機(jī)制和加權(quán)法。如下:
若設(shè)E′∈[E′k,E′k+1],同樣地有:
由上隸屬度函數(shù)圖形可知,一維模糊控制器工作時(shí),任何時(shí)候最多只有兩個(gè)隸屬度函數(shù)對(duì)輸入量有非零值,最多有兩個(gè)模糊規(guī)則同時(shí)起作用,所以有如下一般公式:

故可推得:
一維模糊控制器輸入輸出表達(dá)式可寫為:

同樣地對(duì)式(18)兩邊同時(shí)取微分得到:
由上圖2可知,模糊控制器最后的輸出量,可表示為:


其中,
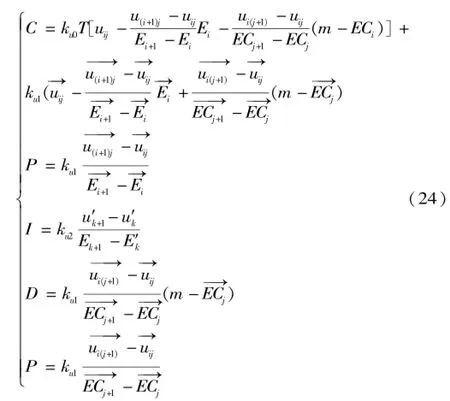
所以所設(shè)計(jì)的這種雙模糊控制器PI從本質(zhì)上是變系數(shù)的PID控制器,這也表明所提出的雙模糊PI控制器適合類似于永磁同步電機(jī)這種非線性,參數(shù)時(shí)變的系統(tǒng)。
2.3雙模糊PI控制器的設(shè)計(jì)實(shí)現(xiàn)
由化簡(jiǎn)整理后的公式(23)可以看出,所設(shè)計(jì)的雙模糊PI控制器用于永磁同步電機(jī)矢量控制系速度外環(huán)中,電流內(nèi)環(huán)用傳統(tǒng)PI控制。外環(huán)決定系統(tǒng)的動(dòng)態(tài)性能,而且擾動(dòng)因素給被控對(duì)象帶來(lái)的干擾也可由外環(huán)加以抑制或彌補(bǔ)。
對(duì)于二輸入二輸出模糊控制器,將輸入與輸出語(yǔ)言變量均采用三角形隸屬度函數(shù),且均劃分為7個(gè)等級(jí),{NB(負(fù)大),NM(負(fù)中),NS(負(fù)小),ZO(零),PS(正小),PM(正中),PB(正大)},其輸入端偏差和偏差變化率的模糊論域分別取為:
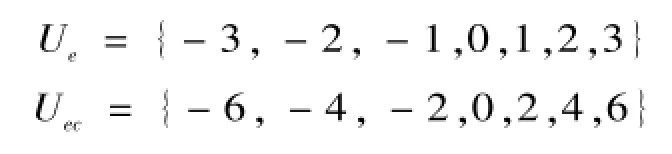

而對(duì)單模糊控制器,將其輸入語(yǔ)言變量分為{NB(負(fù)大),NM(負(fù)中),NS(負(fù)小),NO(負(fù)零),PZ(正零)PS(正小),PM(正中),PB(正大)}8個(gè)等級(jí),而將輸出語(yǔ)言變量分為7個(gè)等級(jí)。對(duì)輸入端偏差的模糊論域

對(duì)輸出端的變量模糊論域取為:

設(shè)置好模糊論域與相關(guān)參數(shù)后,在MATLAB中分別設(shè)計(jì)一維與二維模糊控制器。
3 PMSM矢量系統(tǒng)結(jié)構(gòu)框圖
建立永磁同步電機(jī)數(shù)學(xué)模型時(shí),不考慮電機(jī)的渦流損耗和遲滯損耗且假設(shè)永磁同步電機(jī)具有正弦波反電勢(shì)[14]。在永磁同步電機(jī)雙閉環(huán)矢量調(diào)速系統(tǒng)中,通常外環(huán)能夠決定系統(tǒng)的動(dòng)態(tài)性能,而且擾動(dòng)因素給控制系統(tǒng)帶來(lái)的擾動(dòng)因素也可由外環(huán)加以抑制或彌補(bǔ),所以所設(shè)計(jì)的雙模糊PI控制器用于永磁同步電機(jī)矢量控制系速度外環(huán)中,電流內(nèi)環(huán)用傳統(tǒng)PI控制。系統(tǒng)仿真結(jié)構(gòu)框圖如下圖5所示。
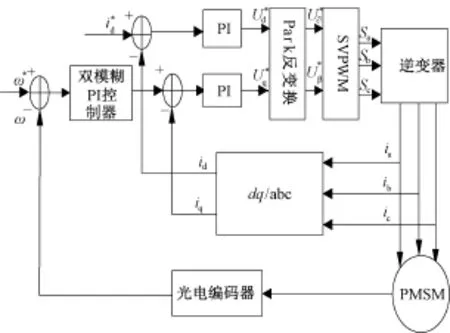
圖5 PMSM矢量控制系統(tǒng)框圖
4 仿真分析
在PMSM矢量控制器系統(tǒng)框圖的基礎(chǔ)上,搭建仿真框圖,設(shè)置好相關(guān)參數(shù)并進(jìn)行仿真調(diào)試。仿真調(diào)試主要分為兩部分,分別用傳統(tǒng)模糊PI自整定控制器與雙模糊PI控制器代替?zhèn)鹘y(tǒng)雙閉環(huán)調(diào)速系統(tǒng)的外環(huán)PI控制,并進(jìn)行仿真分析。

圖6 轉(zhuǎn)速與時(shí)間
由圖6分析可知,設(shè)置仿真系統(tǒng)運(yùn)行時(shí)間為0.3 s。初始負(fù)載轉(zhuǎn)矩設(shè)置為5 N·m,當(dāng)系統(tǒng)運(yùn)行到0.1 s時(shí),突加10 N·m的負(fù)載轉(zhuǎn)矩。圖中曲線1為雙模糊PI控制后的矢量系統(tǒng)輸出的轉(zhuǎn)速與時(shí)間曲線;曲線2為一般模糊PI控制后的轉(zhuǎn)速與時(shí)間曲線;虛線3為給定的系統(tǒng)參考轉(zhuǎn)速。無(wú)論在系統(tǒng)初始階段還是在最終穩(wěn)定階段,曲線1相對(duì)曲線2超調(diào)量更小、穩(wěn)定性更好。由于雙模糊PI控制比一般模糊PI控制多8條模糊語(yǔ)言規(guī)則,所以在動(dòng)態(tài)性能方面,雙模糊PI控制較一般模糊PI控制,略顯不足,但并不影響系統(tǒng)的運(yùn)行。
圖7為永磁同步電機(jī)輸出的轉(zhuǎn)矩與時(shí)間關(guān)系曲線圖。曲線4為雙模糊PI控制下的電磁轉(zhuǎn)矩與時(shí)間曲線,曲線5為一般模糊PI控制下的電磁轉(zhuǎn)矩與時(shí)間曲線。比較分析可知,在雙模糊PI控制下電磁轉(zhuǎn)矩與時(shí)間曲線穩(wěn)定性更好。

圖7 轉(zhuǎn)矩與時(shí)間
圖8、圖9分別為一般模糊PI與雙模糊PI控制下的三相定子電流波形。比較分析可知,圖9中雙模糊PI控制下的三相定子電流波形圖更為平滑,穩(wěn)定性更好。
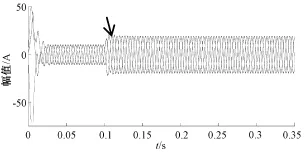
圖8 模糊PI控制下的三相定子電流
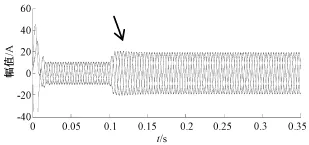
圖9 雙模糊PI控制下的三相定子電流
5 結(jié)論
本文重點(diǎn)分析了在永磁同步電機(jī)雙閉環(huán)矢量調(diào)速系統(tǒng)的速度外環(huán)中分別引入雙模糊PI控制與一般模糊PI兩種控制方式,通過(guò)SIMUKINK仿真軟件構(gòu)建系統(tǒng)仿真模型并分析了兩種控制方式下電機(jī)轉(zhuǎn)速響應(yīng)、電磁轉(zhuǎn)矩變化與永磁同步電機(jī)三相定子電流波形。仿真結(jié)果表明,提出的雙模糊PI控制器較一般模糊PI控制器使得永磁同步電機(jī)在啟動(dòng)階段、受干擾之后的恢復(fù)階段及最終的穩(wěn)定狀態(tài)時(shí)有著更好的抗干擾性與穩(wěn)定性。
[1] 姜富寬.模糊控制器的結(jié)構(gòu)和設(shè)計(jì)[J].電子世界,2015(20):124-125.
[2] 黃春香.基于MATLAB的模糊控制器設(shè)計(jì)與仿真[J].科技風(fēng),2015(23):13.
[3] 唐雷.基于改進(jìn)PSO的模糊控制器的設(shè)計(jì)與優(yōu)化[D].合肥:中國(guó)科學(xué)技術(shù)大學(xué),2009.
[4] 王寶忠,王維,王波.基于模糊自整定PI的PMSM伺服系統(tǒng)的仿真研究[J].電力科學(xué)與工程,2013,29(7):18-22.
[5] 蔣城峰.基于雙模糊控制的永磁同步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)[D].長(zhǎng)沙:中南大學(xué),2008.
[6] 付光杰,趙子明.基于改進(jìn)模糊PI控制的無(wú)位置傳感器無(wú)刷直流電機(jī)調(diào)速研究[J].微電機(jī),2014,47(3):69-72.
[7] 李慶春.新型PID模糊控制器的結(jié)構(gòu)分析及應(yīng)用研究[D].長(zhǎng)沙:中南大學(xué),2010.
[8] 王鑫.模糊PI控制在永磁同步電機(jī)電梯門機(jī)系統(tǒng)中的應(yīng)用[D].天津:天津大學(xué),2012.
[9] 蔣城峰.基于雙模糊控制的永磁同步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)[D].長(zhǎng)沙:中南大學(xué),2008.
[10] 李春亞.直驅(qū)風(fēng)電組雙PWM變流器控制策略研究[D].北京:北京交通大學(xué),2015.
[11] GUO H C,QIU T Y,JIANG J C.Design of fuzzy controller for direct drive wind turbines[J].Journal of Shanghai Jiaotong University Science,2012,17(2): 209-214.
[12] 湯曉磊.基于改進(jìn)模糊控制方法的直升機(jī)姿態(tài)控制研究[D].沈陽(yáng):東北大學(xué),2010.
[13] 徐奔奔,周芝峰,霍文明,等.基于改進(jìn)的模糊控制PMSM矢量控制系統(tǒng)研究[J].電力科學(xué)與工程,2016,32(3):1-6.
[14] 程飛,過(guò)學(xué)迅,別輝,等.電動(dòng)車用永磁同步電機(jī)的雙模糊控制研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2007(18):18-22.
Research on the Application of a Dual Fuzzy PI Controller in PMSM Control System
XU Benben1,ZHOU Zhifeng1,HUO Wenming1,YANG Enxing2
(1.School of Electrical Engineering,Shanghai DianJi University,Shanghai 200230,China;2.Shanghai Electric Power Transmission&Distribution on Group Technology Center,Shanghai 200042,China)
The existing defects on traditional fuzzy PI controller and the characteristic like nonlinear and variable parameter of permanent magnet synchronous motor(PMSM)vector control system,in order to improve the control system performance of PMSM,based on the two-dimensional fuzzy PI controller,one dimension fuzzy controller with integral function is introduced.It is a kind of dual fuzzy PI controller.In this study,the input and output relations of the proposed dual fuzzy controller is theoretically deduced and the structure analysis is carried out.It is concluded that the controller is a nonlinear and variable parameter PID controller.The structure block diagram of system simulation is constructed in SIMULINK,and the simulation analysis is carried out.The simulation results show that the proposed dual fuzzy PI controller makes the PSMS better steady-state performance and anti-jamming performance than the traditional fuzzy PI controller.
PMSM;dual fuzzy PI controller;SIMULINK
TM73
A DOI:10.3969/j.issn.1672-0792.2016.07.002
2016-05-13。
徐奔奔(1990-),男,碩士研究生,主要研究方向?yàn)殡娏﹄娮优c電力傳動(dòng),E-mail:13122608568@163.com。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17