基于光束掃描的透射儀測(cè)量光路自動(dòng)準(zhǔn)直系統(tǒng)設(shè)計(jì)*
2016-08-18 07:36:29馬忠良周樹(shù)道
網(wǎng)絡(luò)安全與數(shù)據(jù)管理 2016年15期
馬忠良,周樹(shù)道,2,劉 星
(1.解放軍理工大學(xué) 氣象海洋學(xué)院,江蘇 南京 210044; 2.南京信息工程大學(xué)氣象災(zāi)害預(yù)警與評(píng)估協(xié)同創(chuàng)新中心,江蘇 南京 210044; 3.解放軍海洋環(huán)境專(zhuān)項(xiàng)辦公室,北京 100081)
?
基于光束掃描的透射儀測(cè)量光路自動(dòng)準(zhǔn)直系統(tǒng)設(shè)計(jì)*
馬忠良1,周樹(shù)道1,2,劉星3
(1.解放軍理工大學(xué) 氣象海洋學(xué)院,江蘇 南京 210044; 2.南京信息工程大學(xué)氣象災(zāi)害預(yù)警與評(píng)估協(xié)同創(chuàng)新中心,江蘇 南京 210044; 3.解放軍海洋環(huán)境專(zhuān)項(xiàng)辦公室,北京 100081)
提出了一種基于光束掃描的透射儀測(cè)量光路準(zhǔn)直方法,分析了該準(zhǔn)直方法的原理。基于該方法設(shè)計(jì)了測(cè)量光路自動(dòng)準(zhǔn)直系統(tǒng),該系統(tǒng)以LPC1768微控制器為核心,主要包括光強(qiáng)及位置信息采集模塊、電機(jī)驅(qū)動(dòng)模塊,并進(jìn)行了該系統(tǒng)的軟件設(shè)計(jì)。系統(tǒng)利用透射儀測(cè)量光路進(jìn)行對(duì)準(zhǔn),易于實(shí)現(xiàn)與透射儀測(cè)量系統(tǒng)的融合,且具有高精度、自動(dòng)化的特點(diǎn)。
自動(dòng)準(zhǔn)直系統(tǒng);光束掃描;透射儀
0 引言
能見(jiàn)度是表征大氣對(duì)視覺(jué)影響的物理量[1],也是氣象觀測(cè)中的一個(gè)要素[2-3],對(duì)能見(jiàn)度的測(cè)量通常采用能見(jiàn)度儀。透射式能見(jiàn)度儀(簡(jiǎn)稱透射儀)不對(duì)大氣作均勻假設(shè),直接探測(cè)大氣透過(guò)率和消光系數(shù)[4],測(cè)量精度比較高,更加適合于低能見(jiàn)度條件下使用,目前廣泛應(yīng)用于機(jī)場(chǎng)跑道等大氣水平能見(jiàn)度測(cè)量場(chǎng)合。世界氣象組織(WMO)開(kāi)展的能見(jiàn)度儀器比對(duì)也是以透射儀為比對(duì)標(biāo)準(zhǔn)[5]。透射儀收發(fā)兩端距離較遠(yuǎn)(>50m),使得透射儀測(cè)量光路對(duì)準(zhǔn)困難。同時(shí),儀器在風(fēng)力、熱應(yīng)力的作用下,收發(fā)兩端位置會(huì)發(fā)生偏移,從而影響測(cè)量光路準(zhǔn)直性。因此,在透射儀探測(cè)技術(shù)中,測(cè)量光路準(zhǔn)直是影響透射儀測(cè)量精度的關(guān)鍵技術(shù)[6]。
本文介紹了一種基于掃描方式的透射儀測(cè)量光路自動(dòng)準(zhǔn)直系統(tǒng)。該系統(tǒng)具有高精度、自動(dòng)化等特點(diǎn),易于與透射儀測(cè)量系統(tǒng)結(jié)合。基于LPC1768微控制器設(shè)計(jì)了自動(dòng)準(zhǔn)直系統(tǒng)的硬件電路,并介紹了該系統(tǒng)的軟件工作流程,通過(guò)多次對(duì)準(zhǔn)提高了準(zhǔn)直系統(tǒng)的對(duì)準(zhǔn)精度。
1 基于光束掃描方式的透射儀測(cè)量光路準(zhǔn)直原理
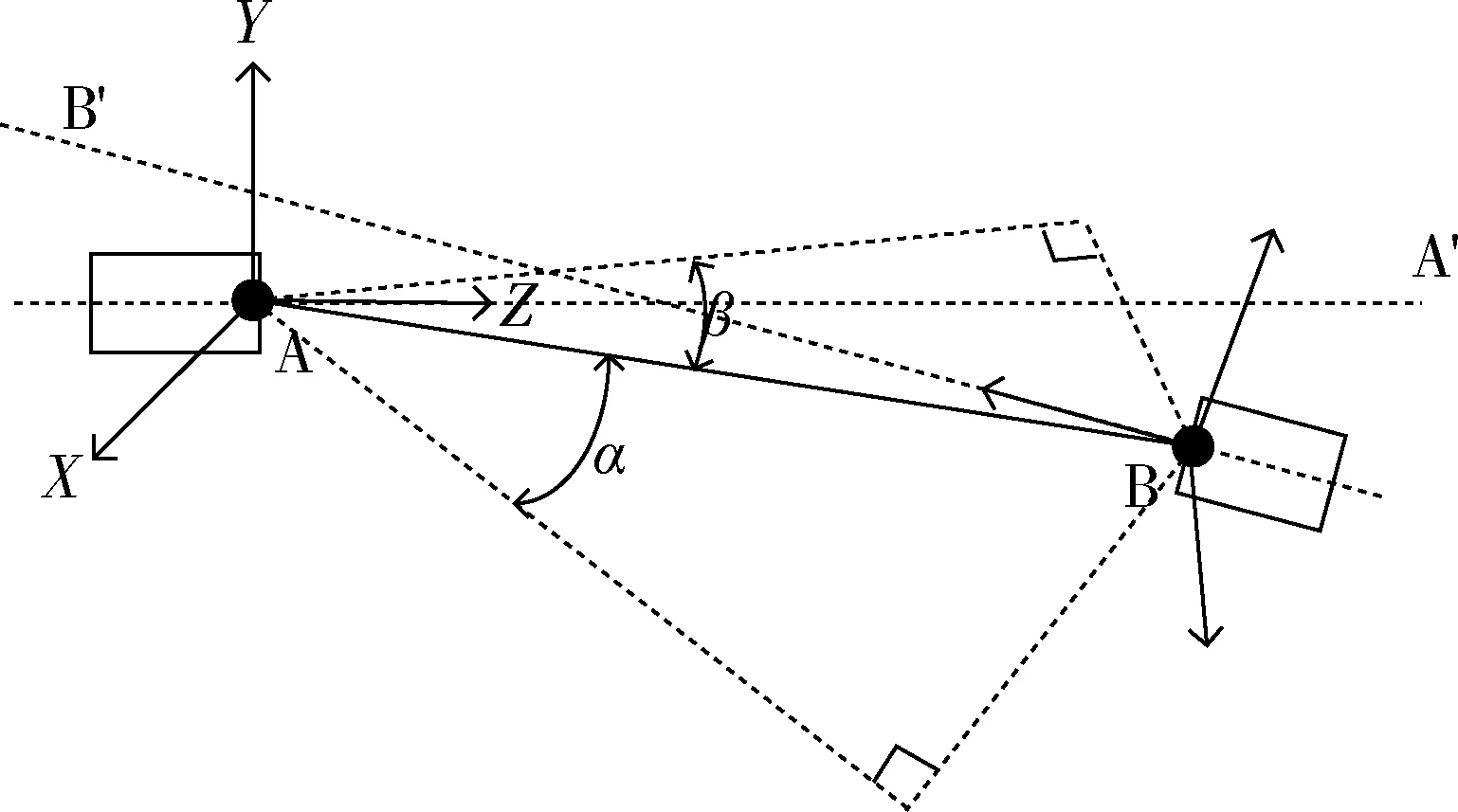
圖1 透射儀測(cè)量光路準(zhǔn)直模型
透射儀測(cè)量系統(tǒng)由發(fā)射器與接收器組成,透射儀測(cè)量光路的準(zhǔn)直就是使得發(fā)射器A發(fā)出的探測(cè)光束中心線與接收器B的接收視場(chǎng)中心線重合。這就要求發(fā)射器和接收器均處在對(duì)準(zhǔn)的位置。發(fā)射器或接收器的準(zhǔn)直狀態(tài)可通過(guò)兩個(gè)垂直方向的準(zhǔn)直方位角描述,如圖1中α、β所示。當(dāng)α、β均為0deg時(shí),表示發(fā)射器A對(duì)準(zhǔn)。同理可得接收器B準(zhǔn)直方位角。
基于光束掃描方式的透射儀測(cè)量光路準(zhǔn)直方法準(zhǔn)直原理是使發(fā)射器(或接收器)進(jìn)行兩個(gè)垂直方向的掃描運(yùn)動(dòng),測(cè)量掃描運(yùn)動(dòng)過(guò)程中發(fā)射器(或接收器)的角度和接收光強(qiáng)。由于各方向準(zhǔn)直方位角為光強(qiáng)隨角度變化曲線的對(duì)稱中心,因此,根據(jù)接收光強(qiáng)隨角度變化的關(guān)系得到測(cè)量光路準(zhǔn)直時(shí)發(fā)射器(或接收器)的準(zhǔn)直方位角。完成測(cè)量及數(shù)據(jù)處理以后,驅(qū)動(dòng)發(fā)射器(或接收器)運(yùn)動(dòng)使得各方位角為0deg,從而實(shí)現(xiàn)測(cè)量光路的對(duì)準(zhǔn)。
2 總體方案設(shè)計(jì)
透射儀的自動(dòng)準(zhǔn)直系統(tǒng)是透射儀測(cè)量系統(tǒng)的輔助測(cè)量系統(tǒng),結(jié)構(gòu)及硬件、軟件設(shè)計(jì)均是在透射儀測(cè)量系統(tǒng)的基礎(chǔ)上進(jìn)行的。準(zhǔn)直系統(tǒng)工作時(shí)需要完成光源控制、接收光強(qiáng)測(cè)量、方位角測(cè)量、數(shù)據(jù)存儲(chǔ)與處理以及驅(qū)動(dòng)掃描和定位等功能。基于掃描方式的透射儀測(cè)量光路準(zhǔn)直系統(tǒng)是利用透射儀本身測(cè)量光路進(jìn)行對(duì)準(zhǔn),基于透射儀測(cè)量系統(tǒng)設(shè)計(jì)的自動(dòng)準(zhǔn)直系統(tǒng)。在透射儀測(cè)量系統(tǒng)中,已經(jīng)實(shí)現(xiàn)了對(duì)測(cè)量光源的控制及接收光強(qiáng)的測(cè)量,因此,自動(dòng)準(zhǔn)直系統(tǒng)主要完成對(duì)位置信息的測(cè)量及控制發(fā)射器及接收器的位置。準(zhǔn)直系統(tǒng)在透射儀測(cè)量系統(tǒng)微控制器的控制下進(jìn)行工作,并在微控制器中完成數(shù)據(jù)存儲(chǔ)與處理。準(zhǔn)直系
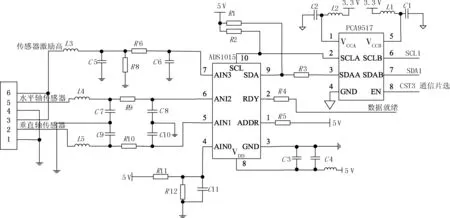
圖3 位置信息采集模塊電路原理圖
統(tǒng)組成框圖如圖2所示。
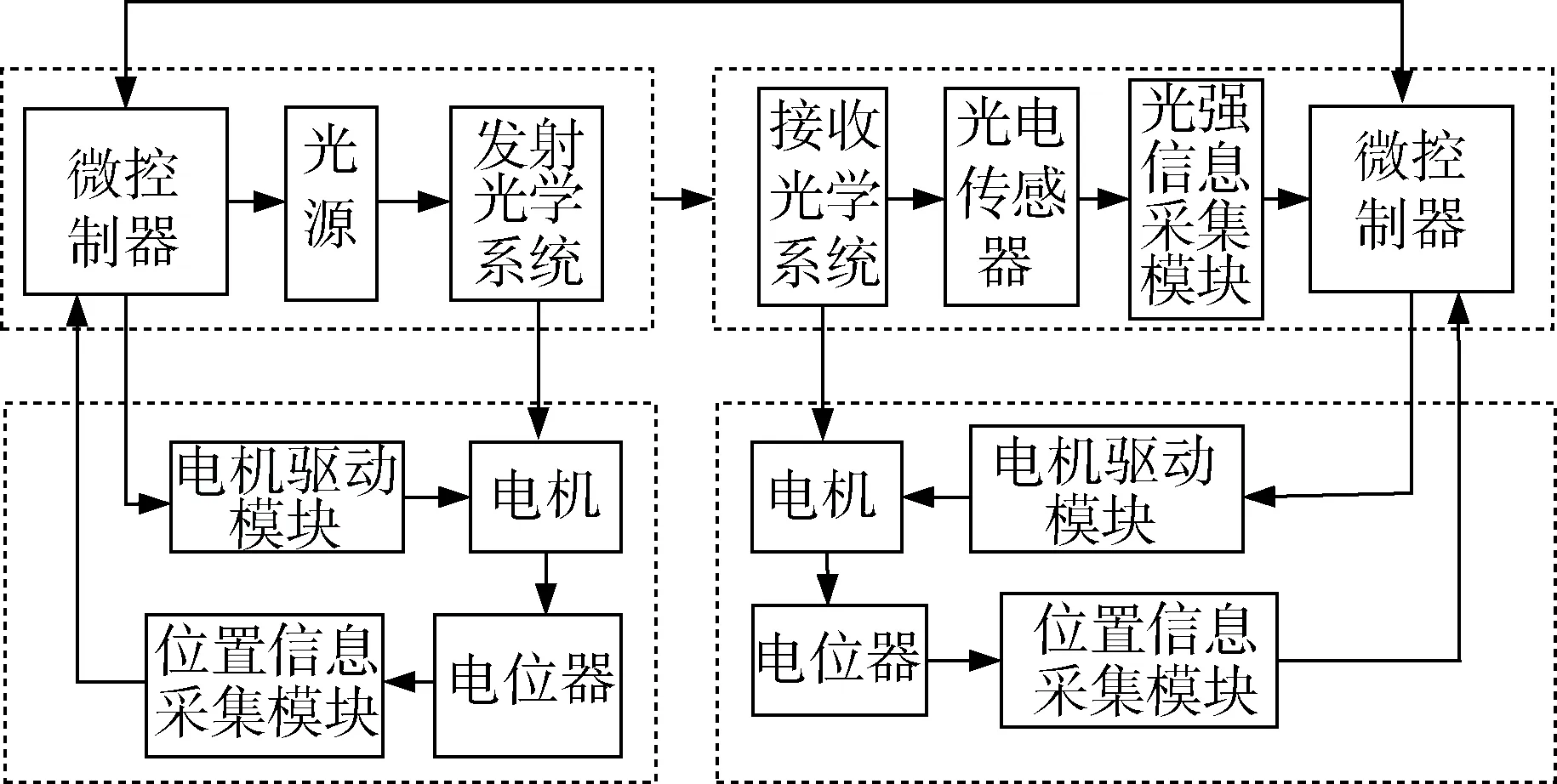
圖2 系統(tǒng)總體設(shè)計(jì)方案
透射儀測(cè)量系統(tǒng)的主控制器為L(zhǎng)PC1768,相比于其他控制器,基于ARMCotex-M3內(nèi)核的LPC1 768微控制器具有32位運(yùn)算能力,且包含高達(dá)512KB的Flash存儲(chǔ)器、64KB的數(shù)據(jù)存儲(chǔ)器,具有豐富的外部接口,功能強(qiáng)大、使用靈活、成本合理。準(zhǔn)直系統(tǒng)的位置信息采集模塊和電機(jī)驅(qū)動(dòng)模塊通過(guò)I2C接口與微控制器相連,通過(guò)I2C總線傳輸控制命令和數(shù)據(jù)。
如圖2所示,位置信息采集模塊主要進(jìn)行方位角的測(cè)量,在掃描及定位的過(guò)程中均需要進(jìn)行方位角的測(cè)量。測(cè)量過(guò)程主要是將電位器采集的角度模擬信號(hào)轉(zhuǎn)化成數(shù)字信號(hào),并發(fā)送至主控制器。電機(jī)驅(qū)動(dòng)模塊主要驅(qū)動(dòng)發(fā)射器或接收器進(jìn)行兩個(gè)垂直方向的掃描運(yùn)動(dòng)并最終將發(fā)射器或接收器定位到準(zhǔn)直位置。電機(jī)驅(qū)動(dòng)模塊主要是根據(jù)主控器輸出的控制命令產(chǎn)生電機(jī)控制電壓信號(hào),驅(qū)動(dòng)電機(jī)進(jìn)行相應(yīng)的運(yùn)轉(zhuǎn)。
3 硬件設(shè)計(jì)
3.1位置信息采集模塊
位置信息采集模塊硬件電路如圖3所示。模塊采集的位置信息為電機(jī)旋轉(zhuǎn)的角度,傳感器采用角度傳感器。兩個(gè)垂直方向分別為水平方向和垂直方向。模塊中采用ADS1015芯片進(jìn)行位置信號(hào)的模數(shù)轉(zhuǎn)換。該芯片為12位多路轉(zhuǎn)換芯片,可實(shí)現(xiàn)兩個(gè)垂直方向位置模擬信號(hào)高速、高精度轉(zhuǎn)換。主控制器通過(guò)I2C接口經(jīng)過(guò)PCA9517I2C中繼器來(lái)控制轉(zhuǎn)換芯片。模塊通過(guò)中繼器可與其他I2C設(shè)備相連接。由于在位置信息模擬信號(hào)中存在一定的噪聲成分,因此在ADS1015芯片模擬信號(hào)輸入端設(shè)計(jì)了前置濾波電路。
當(dāng)系統(tǒng)需采集相應(yīng)位置信息時(shí),主控制器選通PCA9517,通過(guò)I2C總線發(fā)送ADS1015芯片地址訪問(wèn)芯片,并發(fā)送相應(yīng)通道的轉(zhuǎn)換命令,啟動(dòng)一次位置信號(hào)的模數(shù)轉(zhuǎn)換;當(dāng)模數(shù)轉(zhuǎn)換完成時(shí),芯片置位RDY端口,提示主控芯片可讀取轉(zhuǎn)換結(jié)果,芯片將轉(zhuǎn)換結(jié)果經(jīng)過(guò)I2C總線發(fā)送至主控制器,完成一次位置信息的采集。
3.2電機(jī)驅(qū)動(dòng)模塊
電機(jī)驅(qū)動(dòng)模塊硬件電路如圖4所示。由于自動(dòng)準(zhǔn)直系統(tǒng)的發(fā)射器與接收器需要進(jìn)行兩個(gè)垂直方向的掃描及定位,因此每一端需要水平及垂直兩個(gè)直流電機(jī)。模塊中采用DRV8830作為直流電機(jī)的驅(qū)動(dòng)芯片。DRV8830芯片是一個(gè)低壓H橋電壓控制直流電機(jī)驅(qū)動(dòng)器。工作電源電壓2.75V~6.8V。通過(guò)PWM電壓調(diào)節(jié)技術(shù)控制芯片的電壓輸出,使得芯片能夠在外部電源電壓不穩(wěn)的情況下保證電機(jī)運(yùn)行速度的穩(wěn)定。主控制器通過(guò)I2C總線控制驅(qū)動(dòng)芯片的輸出電壓,進(jìn)而控制直流電機(jī)的轉(zhuǎn)動(dòng)模式及轉(zhuǎn)速。由于驅(qū)動(dòng)芯片的輸出為模擬信號(hào),為了保證電機(jī)輸入電壓的穩(wěn)定,在直流電機(jī)輸入端設(shè)計(jì)了濾波電路。
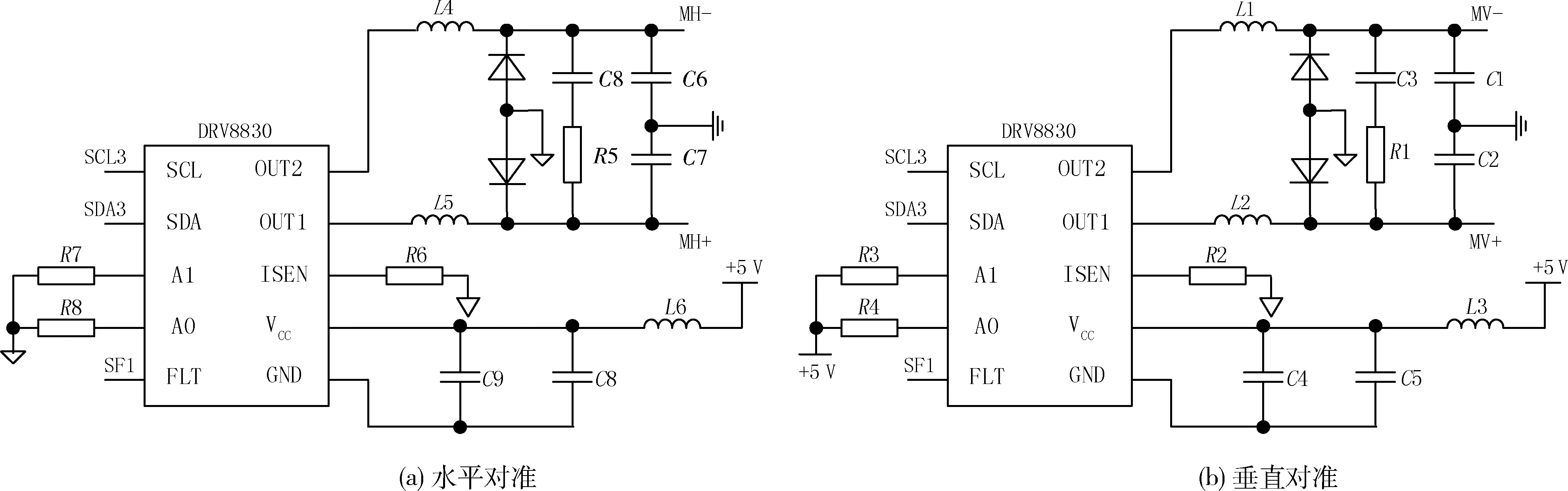
圖4 電機(jī)驅(qū)動(dòng)模塊電路原理圖
當(dāng)自動(dòng)準(zhǔn)直系統(tǒng)需要進(jìn)行相應(yīng)方向的掃描或定位時(shí),主控制器選通相應(yīng)的I2C中繼器,通過(guò)I2C總線發(fā)送DRV8830芯片地址訪問(wèn)芯片,并發(fā)送相應(yīng)的控制命令,驅(qū)動(dòng)電機(jī)執(zhí)行相應(yīng)的動(dòng)作。當(dāng)沒(méi)有新的控制命令時(shí),驅(qū)動(dòng)芯片驅(qū)動(dòng)電機(jī)保持當(dāng)前狀態(tài)運(yùn)轉(zhuǎn)。
4 軟件設(shè)計(jì)
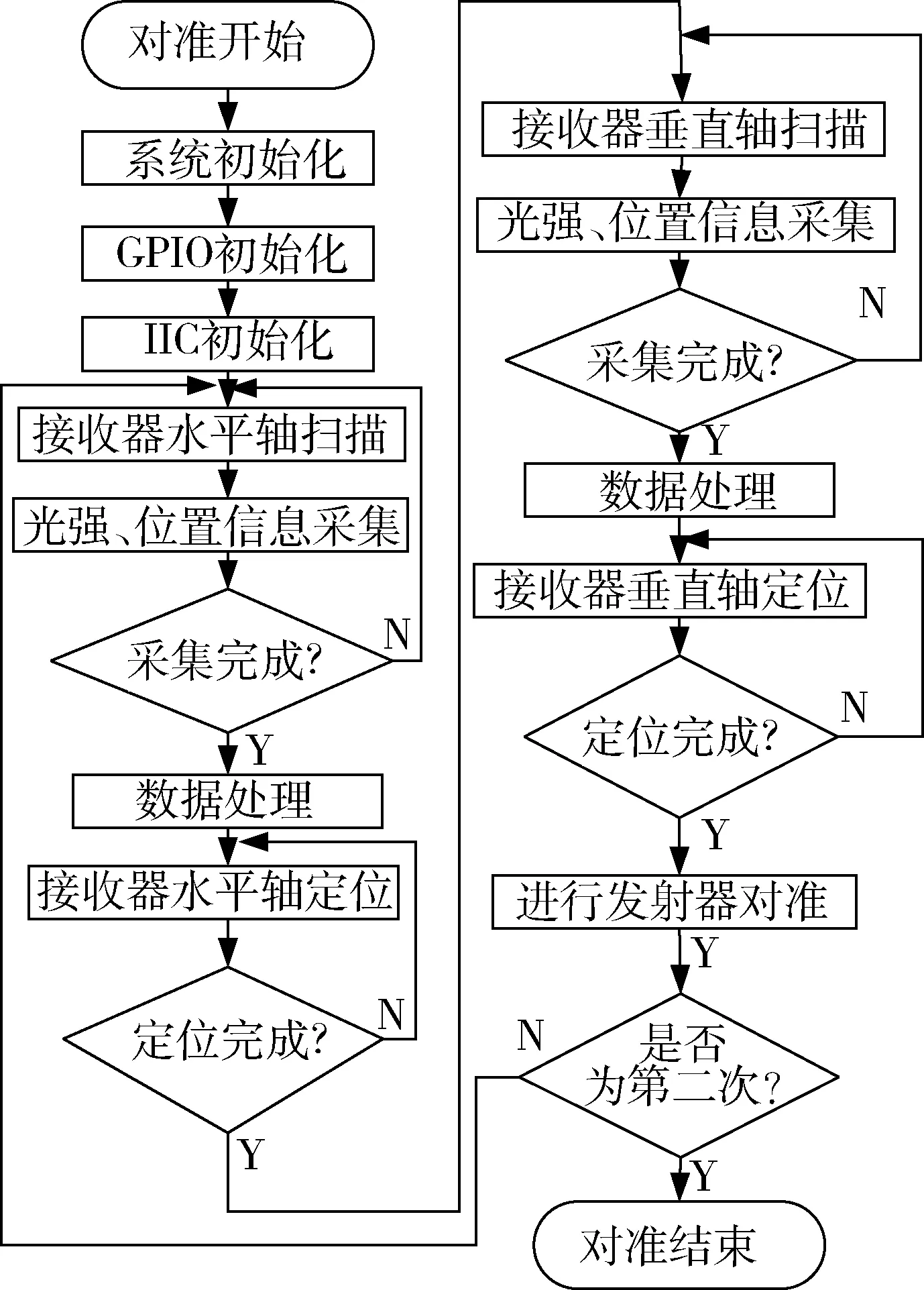
圖5 系統(tǒng)軟件流程圖
透射儀自動(dòng)準(zhǔn)直系統(tǒng)軟件主程序流程如圖5所示。
流程圖描述了接收器對(duì)準(zhǔn)過(guò)程,發(fā)射器對(duì)準(zhǔn)過(guò)程與接收器對(duì)準(zhǔn)過(guò)程類(lèi)似。將透射儀安裝完畢以后,先進(jìn)行人工初始對(duì)準(zhǔn)。人工初始對(duì)準(zhǔn)的目的是讓接收器能夠接收到發(fā)射器發(fā)出的探測(cè)光。人工初始對(duì)準(zhǔn)完畢后,由主控制器運(yùn)行自動(dòng)對(duì)準(zhǔn)程序,進(jìn)行自動(dòng)對(duì)準(zhǔn)。為了提高自動(dòng)準(zhǔn)直系統(tǒng)的對(duì)準(zhǔn)精度,系統(tǒng)對(duì)發(fā)射器和接收器分別進(jìn)行兩次對(duì)準(zhǔn),每一次對(duì)準(zhǔn)操作按照先接收器后發(fā)射器的順序進(jìn)行。自動(dòng)準(zhǔn)直程序首先進(jìn)行初始化,完成相關(guān)初始化之后,按照先水平軸后垂直軸的順序分別執(zhí)行掃描、光強(qiáng)及位置信息采集、數(shù)據(jù)處理和定位操作。掃描和定位主要由電機(jī)驅(qū)動(dòng)模塊執(zhí)行,定位過(guò)程中仍需要進(jìn)行位置信息采集以判斷電機(jī)轉(zhuǎn)軸是否到達(dá)指定位置。光強(qiáng)信息采集是通過(guò)程序中的測(cè)量接收光強(qiáng)命令由透射儀中的接收光強(qiáng)測(cè)量模塊完成。數(shù)據(jù)處理是由主控制器根據(jù)測(cè)量的光強(qiáng)及位置數(shù)據(jù)計(jì)算得到相應(yīng)的方位角,該方位角即為定位過(guò)程中轉(zhuǎn)軸需要到達(dá)的位置。
5 結(jié)論
本文根據(jù)透射儀光學(xué)系統(tǒng)的特征,在其測(cè)量光路的基礎(chǔ)上設(shè)計(jì)了基于掃描方式的自動(dòng)準(zhǔn)直系統(tǒng),并配合相關(guān)傳感器完成了系統(tǒng)的硬件電路設(shè)計(jì),并對(duì)軟件流程作了規(guī)劃,可以實(shí)現(xiàn)透射儀測(cè)量光路的自動(dòng)對(duì)準(zhǔn)。該系統(tǒng)不需要另外設(shè)計(jì)對(duì)準(zhǔn)光源,且利用透射儀主控制器進(jìn)行控制,便于在透射儀測(cè)量系統(tǒng)中應(yīng)用。
[1] 饒瑞中. 大氣中的視覺(jué)和大氣能見(jiàn)度[J].光學(xué)學(xué)報(bào),2010,30(9):2486-2492.
[2] 岳斌,董晶晶,孫東松,等. 便攜式激光雷達(dá)能見(jiàn)度儀的研制[J].紅外與激光工程,2008,37(S3):129-132.
[3] 牛利平,楊中秋.DT型大氣能見(jiàn)度儀的光學(xué)系統(tǒng)[J].光電工程,1990,17(6):1-6.
[4] 程紹榮,魏全忠,呂軍. 一種實(shí)用型大氣透射式能見(jiàn)度儀的研制[J].光電工程,2011,38(2):144-150.
[5] 邢向楠,崔巖梅,李濤, 等. 基于透射法的能見(jiàn)度測(cè)量裝置設(shè)計(jì)與實(shí)驗(yàn)研究[J].計(jì)測(cè)技術(shù),2011,31(3):10-13.
[6] 馬忠良,周樹(shù)道. 透射式能見(jiàn)度儀發(fā)展現(xiàn)狀與關(guān)鍵技術(shù)[J].氣象水文裝備,2015(2):9-12.
A design for optical path automatic alignment system of transmittance meter based on light beam scanning
MaZhongliang1,ZhouShudao1,2,LiuXing3
(1.CollegeofMeteorologyandOceanography,PLAUniversityofScienceandTechnology,Nanjing210044,China;2.CollaborativeInnovationCenteronForecastandEvaluationofMeteorologicalDisasters,NanjingUniversityofInformationScience&Technology,Nanjing210044,China;3.SpecialOfficeofthePLA’sMarineEnvironment,Beijing100081,China)
Aopticalpathalignmentmethodformeasurementopticalpathoftransmittancemeterbasedonlightbeamscanningwasproposed,andtheprincipleofthismethodwasanalyzed.Theautomaticalignmentsystemwasdesignedbasedonthismethod,andLPC1768wasusedasthemicrocontrollercoreofthesystem.Thesystemmainlyincludeslightintensityandlocationinformationacquisitionmoduleandmotordrivemodule.Andinthispaper,softwareprocesseswaspresented.Thesystemusestheopticalpathoftransmittancemetertorealizealignment,andeasytofusewithtransmittancemetermeasurementsystem.Thesystemhasfeaturesofhighprecisionandautomation.
automaticalignmentsystem;lightbeamscanning;transmittancemeter
國(guó)家自然科學(xué)基金(41301370)
TN12ADOI: 10.19358/j.issn.1674- 7720.2016.15.012
2016-03-04)
馬忠良(1990-),通信作者,男,碩士,主要研究方向:透射式能見(jiàn)度探測(cè)技術(shù)。E-mail:15250951167@163.com。
周樹(shù)道(1964-),男,碩士,教授,主要研究方向:信息與信號(hào)處理。
劉星(1990-),男,碩士,主要研究方向:信息與信號(hào)處理。
引用格式:馬忠良,周樹(shù)道,劉星. 基于光束掃描的透射儀測(cè)量光路自動(dòng)準(zhǔn)直系統(tǒng)設(shè)計(jì)[J].微型機(jī)與應(yīng)用,2016,35(15):42-44,47.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
