履帶車輛懸掛系統(tǒng)穩(wěn)定性分析
2016-08-16 09:05:08王鑫磊
現(xiàn)代機(jī)械 2016年4期
許 奎,王鑫磊
(1. 中國(guó)北方車輛研究所,北京100072; 2. 中國(guó)北方工業(yè)公司,北京100053)
?
履帶車輛懸掛系統(tǒng)穩(wěn)定性分析
許奎1,王鑫磊2
(1. 中國(guó)北方車輛研究所,北京100072; 2. 中國(guó)北方工業(yè)公司,北京100053)
履帶車輛懸掛系統(tǒng)不僅直接影響到車輛的平順性和舒適性,而且對(duì)履帶車輛的穩(wěn)定性能和行進(jìn)間射擊精度有著重要的影響。基于履帶車輛建立了路面模型和車輛懸掛系統(tǒng)的二自由度動(dòng)力學(xué)模型,采用Simulink對(duì)懸掛系統(tǒng)動(dòng)力學(xué)模型進(jìn)行仿真計(jì)算,并通過(guò)改變懸掛的阻尼剛度和彈簧剛度來(lái)分析其對(duì)車輛穩(wěn)定性和車輛射擊精度的影響,為懸掛系統(tǒng)的設(shè)計(jì)提供基礎(chǔ)。
懸掛系統(tǒng)Simulink仿真穩(wěn)定性射擊精度
履帶車輛的懸掛系統(tǒng)不僅將車體和負(fù)重輪彈性地連接起來(lái), 而且傳遞了作用在負(fù)重輪和車體間的一切力和力矩,并緩和了車輛行駛時(shí)經(jīng)過(guò)負(fù)重輪傳遞到車體上的沖擊力,從而減少了車體的振動(dòng),提高了車輛的行駛穩(wěn)定性和車輛行進(jìn)間的射擊精度[1]。因此,履帶車輛的懸掛系統(tǒng)不僅對(duì)車輛的舒適性和平穩(wěn)性有著重要的作用,而且對(duì)車輛的操作穩(wěn)定性和行進(jìn)間射擊精度有直接的影響。
1 路面模型的建立
國(guó)內(nèi)外的許多測(cè)量分析表明,為了描述車輛振動(dòng)輸入的路面不平度,國(guó)際標(biāo)準(zhǔn)協(xié)會(huì)在《路面不平度表示方法草案》標(biāo)準(zhǔn)中, 建議采用路面功率譜密度來(lái)描述其統(tǒng)計(jì)特性,并用下式作為擬合功率譜密度的表達(dá)式[2]:
Gq(n)=Gq(n0)(n/n0)-w
(1)
式中:n—空間頻率,表示每1m長(zhǎng)度中包含n個(gè)波長(zhǎng);n0—參考空間頻率,n0=0.1m-1;w—頻率指數(shù),通常取w=2;Gq(n0)—路面不平度系數(shù)(即參考空間頻率n0下的路面功率譜密度值),m3。
本文使用白噪聲模擬激勵(lì),路面隨機(jī)激勵(lì)的時(shí)域模型使用一階濾波,其位移表達(dá)式[3]:
(2)
式中,xr為路面不平度位移,m;f0為下截止頻率,Hz; u為車輛速度,m/s;w(t)為隨機(jī)白噪聲。
選擇在D級(jí)路面上進(jìn)行隨機(jī)路面仿真,則Gq(n0)=1 024×10-6m3,下截止頻率f0取為0.062 8Hz,車速u取10m/s。路面激勵(lì)模型如圖1所示。
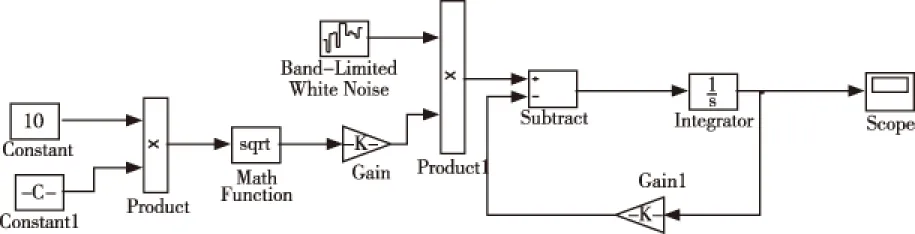
圖1 路面激勵(lì)模型
則得到D級(jí)隨機(jī)路面時(shí)域結(jié)果如圖2所示。
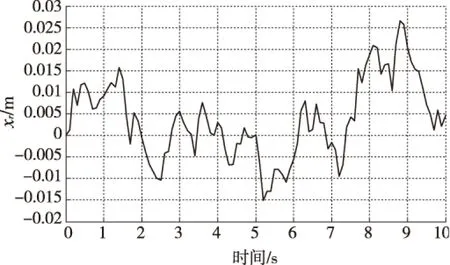
圖2 10 m/s時(shí)D級(jí)隨機(jī)路面位移時(shí)域變化
2 懸掛系統(tǒng)模型建立
以車輛靜止平衡時(shí)懸掛的質(zhì)心為坐標(biāo)原點(diǎn)建立車體平面坐標(biāo)系。設(shè)車輛水平行駛方向?yàn)閄軸(正向?yàn)檐囕v行駛方向),與地面垂直的方向?yàn)閆軸(正向垂直地面向上),而與X、Z所在平面垂直的方向?yàn)閅軸,且X,Y,Z軸的正向符合右手法則。由于履帶車輛通常越野行駛在一個(gè)復(fù)雜的環(huán)境中,承受著隨機(jī)的振動(dòng)響應(yīng),因此需要將其進(jìn)行合理的簡(jiǎn)化。一般從三個(gè)方面來(lái)描述車輛的振動(dòng)情況:車身的垂直振動(dòng)情況、車身繞Y軸的俯仰振動(dòng)情況和車身繞X軸的側(cè)傾振動(dòng)。然而,在車輛的行駛過(guò)程中,對(duì)履帶車輛行駛影響較大的是車身的垂直振動(dòng)和車身繞Y軸的俯仰振動(dòng),特別是對(duì)行進(jìn)間射擊精度影響較大。因此在建立懸掛模型時(shí)主要考慮這兩個(gè)方向的振動(dòng)對(duì)車輛穩(wěn)定性和車輛行進(jìn)間射擊精度的影響[4-5]。
2.1懸掛模型建立的基本假設(shè)
由于履帶車輛在越野行駛時(shí)要承受復(fù)雜多變的振動(dòng)響應(yīng)和隨機(jī)激勵(lì),在這種情況下,想要快速地分析其隨機(jī)振動(dòng)過(guò)程對(duì)履帶車輛穩(wěn)定性和行進(jìn)間射擊精度的影響,并建立準(zhǔn)確的數(shù)學(xué)模型,就要對(duì)振動(dòng)做出如下假設(shè)[6]:
1)不考慮車輛在行駛過(guò)程中自身的變形,且路面為剛體;
2)不考慮車身繞X軸的側(cè)傾振動(dòng),并假設(shè)車體部分關(guān)于經(jīng)過(guò)質(zhì)心的縱軸線對(duì)稱;
3)不考慮履帶對(duì)車體振動(dòng)的影響;
4)各輪懸掛的減振器的阻尼系數(shù)相同,均為C;各懸掛的彈簧剛度相同,均為K。
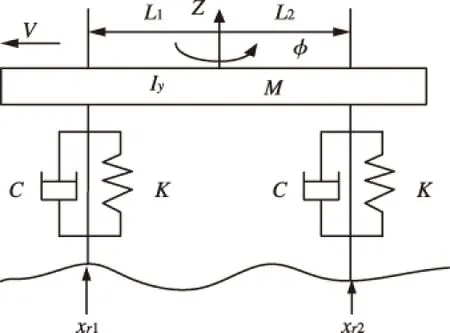
圖3 履帶車輛懸掛系統(tǒng)2自由度模型
2.2履帶車輛懸掛系統(tǒng)動(dòng)力學(xué)方程
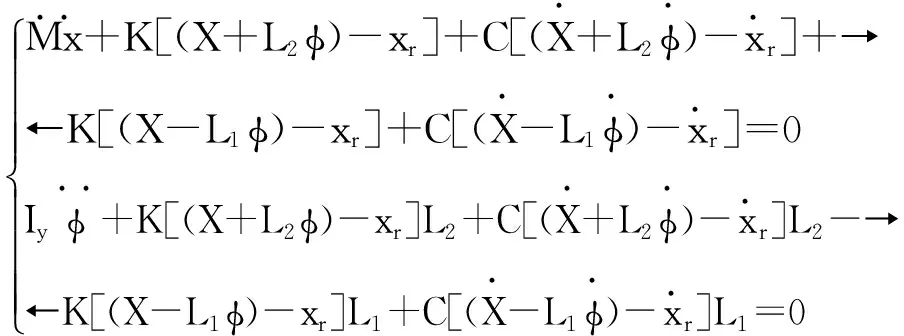
式中:M—車體的質(zhì)量;Iy—車體繞Y軸的轉(zhuǎn)動(dòng)慣量;Z—車體垂直方向的位移;φ—車體的縱向俯仰運(yùn)動(dòng)的角位移;C—懸掛的阻尼剛度;K—彈簧的剛度;L1、L2—對(duì)應(yīng)負(fù)重輪重心至車體重心的距離;xr—路面不平度位移。
其中:
3 仿真分析
根據(jù)懸掛系統(tǒng)的動(dòng)力學(xué)方程和狀態(tài)方程,采用Matlab/Simulink建立如圖4仿真模型進(jìn)行仿真計(jì)算。
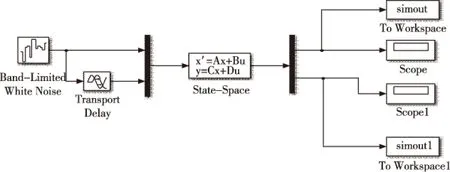
圖4 懸掛系統(tǒng)仿真模型
當(dāng)車輛以10 m/s的速度行駛在E級(jí)路面時(shí)得到的仿真結(jié)果如圖5-圖10。
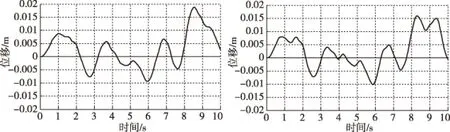
圖5 車身位移響應(yīng) 圖6 車身位移響應(yīng)曲線(K) 曲線(2K)
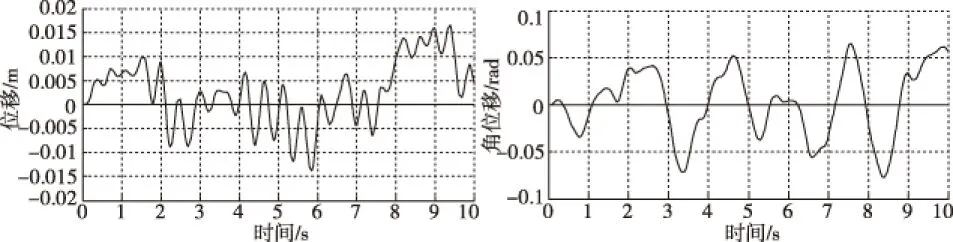
圖7 車身位移響應(yīng) 圖8 車身角位移響曲線(10K) 應(yīng)曲線(K)
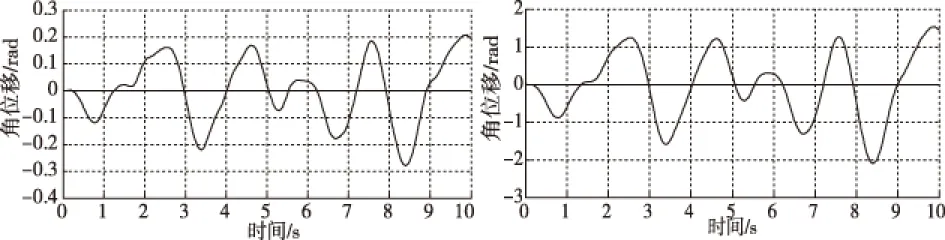
圖9 車身角位移響 圖10 車身角位移響應(yīng)應(yīng)曲線(2K) 曲線(10K)
圖中給出了履帶車輛懸掛系統(tǒng)在K改變時(shí),車身垂直位移和俯仰角位移的變化,從圖中可以看出,隨著K的增大,車身的垂直位移有所減小,但幅度不大,而俯仰角位移卻增大較多,而且彈簧剛度較大時(shí),車身垂直位移和車身俯仰角位移的振動(dòng)頻率明顯增大,不利于車輛的穩(wěn)定性和車輛行進(jìn)間的射擊精度。圖11-圖14給出了履帶車輛懸掛系統(tǒng)在C改變時(shí),車身的垂直位移和俯仰角位移的變化,從圖中可以得出,當(dāng)懸掛阻尼剛度增加時(shí),車身的垂直位移有所減小,但車身的俯仰角位移卻有所增加,而且位移和角位移的振動(dòng)頻率都明顯增加,同樣不利于車輛的穩(wěn)定性和車輛行進(jìn)間射擊精度。總之,履帶車輛懸掛系統(tǒng)的彈簧剛度和阻尼剛度都會(huì)對(duì)車身垂直位移和車身俯仰角位移產(chǎn)生影響,進(jìn)而影響到火炮的穩(wěn)定精度和車輛行進(jìn)間射擊精度。
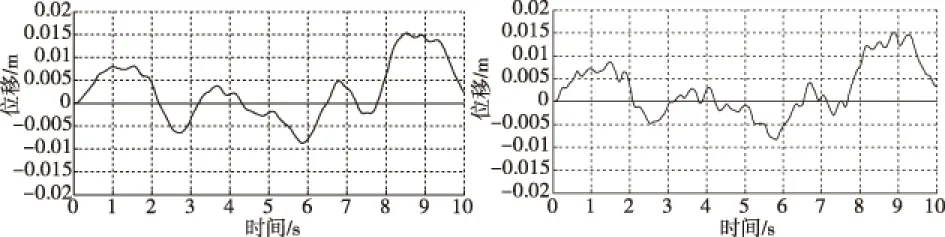
圖11 車身位移響應(yīng) 圖12 車身位移響應(yīng)曲線(2C) 曲線(10C)
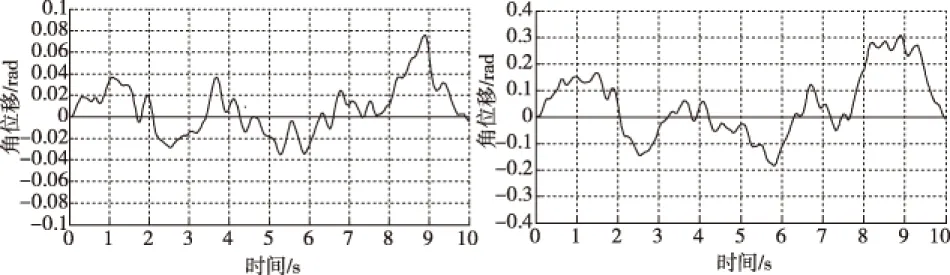
圖13 車身角位移響應(yīng) 圖14 車身角位移響曲線(2C) 應(yīng)曲線(10C)
4 火炮的穩(wěn)定精度
火炮的穩(wěn)定精度定義是:坦克在中等起伏路面上以中等速度行駛時(shí),火炮擺動(dòng)振幅的算術(shù)平均值。由于火炮都有一定的射擊精度,坦克在行進(jìn)間射擊時(shí),火炮的擺動(dòng)就會(huì)對(duì)射擊精度產(chǎn)生影響。而火炮存在的穩(wěn)定精度問(wèn)題主要是由兩個(gè)方面造成:1)系統(tǒng)的干擾誤差。即車輛在行進(jìn)時(shí),炮塔和火炮會(huì)在摩擦力矩的作用下,不斷偏離原來(lái)穩(wěn)定的位置,而穩(wěn)定裝置又會(huì)產(chǎn)生穩(wěn)定力矩不斷令其返回到原來(lái)的位置,從而使火炮出現(xiàn)了微微擺動(dòng)的現(xiàn)象,進(jìn)而產(chǎn)生系統(tǒng)誤差。2)陀螺儀信號(hào)誤差。由于在穩(wěn)定狀態(tài)下,火炮在上下擺動(dòng)時(shí),陀螺儀底座和外環(huán)間會(huì)產(chǎn)生相對(duì)運(yùn)動(dòng),而且外環(huán)軸承也存在一定的摩擦力矩,從而促使內(nèi)環(huán)在火炮上下擺動(dòng)產(chǎn)生相應(yīng)的擺動(dòng),從而產(chǎn)生誤差信號(hào)[8]。如圖15為火炮穩(wěn)定裝置的工作過(guò)程。
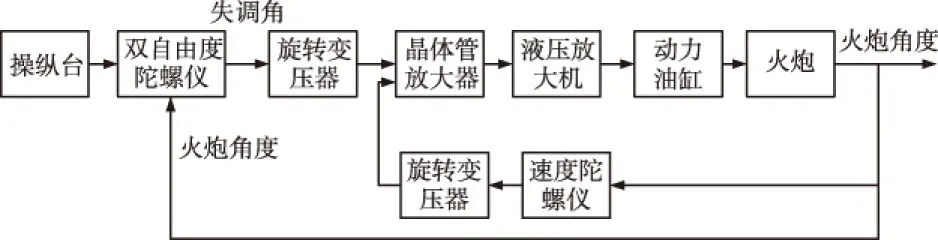
圖15 火炮穩(wěn)定裝置工作過(guò)程
從火炮的穩(wěn)定裝置工作過(guò)程可以看到,當(dāng)火炮的偏離角度越大,變化頻率越高,火炮穩(wěn)定時(shí)所需穩(wěn)定力矩越大,而且火炮的振動(dòng)頻率越高,不利于火炮的穩(wěn)定,使火炮的穩(wěn)定精度減小,從而降低了車輛行進(jìn)間射擊精度。
5 結(jié)論
懸掛系統(tǒng)的彈簧剛度和阻尼剛度對(duì)車身穩(wěn)定性有著決定性的影響,并最終影響到車輛的舒適性和行進(jìn)間射擊精度,如何匹配一個(gè)合適的彈簧剛度和阻尼剛度對(duì)懸掛系統(tǒng)十分重要。由于車體的振動(dòng),會(huì)使車輛的穩(wěn)定性能變差,同時(shí)會(huì)產(chǎn)生系統(tǒng)干擾誤差和陀螺儀誤差信號(hào),且車體的振動(dòng)越大,產(chǎn)生的誤
差信號(hào)也越大,火炮的穩(wěn)定精度越低,從而使車輛行進(jìn)間射擊精度減小。經(jīng)過(guò)仿真分析可知,當(dāng)該履帶車輛懸掛系統(tǒng)的彈簧剛度為K,減振器的阻尼剛度為2C時(shí),車輛的穩(wěn)定性是最好的,從而使得車輛行進(jìn)間射擊精度也最高。
[1]閆清東,張連第,趙毓芹,等.坦克構(gòu)造與設(shè)計(jì)[M].北京:北京理工大學(xué)出版社,2007.
[2]余志生.汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社,2006.
[3]徐龍輝.履帶式自行火炮行進(jìn)間振動(dòng)特性及控制研究[D].南京理工大學(xué),2013.
[4]明鑫.履帶式車輛主動(dòng)懸架研究[D].長(zhǎng)春:長(zhǎng)春吉林大學(xué),2011.

[6]熊超,鄭堅(jiān),張進(jìn)秋,等. 履帶車輛半主動(dòng)懸掛系統(tǒng)建模與仿真[J].兵工自動(dòng)化,2005,24(1):9-11.
[7]楊杭旭.車輛懸掛系統(tǒng)的狀態(tài)反饋控制穩(wěn)定性分析[J].林業(yè)機(jī)械與土木設(shè)備,2014(5):43-44.
[8]朱競(jìng)夫,趙璧君,王欽釗.現(xiàn)代坦克火控系統(tǒng)[M].北京:國(guó)防工業(yè)出版社,2003.
Stability analysis of tracked vehicle suspension system
XU Kui, WANG Xinlei
Tracked vehicle suspension system not only directly affects the comfort index of the vehicle, but also affects its stability and firing accuracy in moving. We established a model of the road surface and a two-degree-of-freedom dynamic model of the tracked vehicle suspension system, and carried out simulated calculation of the models by Simulink. By analyzing the effects of damper stiffness and spring stiffness on the stability and the firing accuracy of the vehicle, we provided reference for the design of vehicle suspension systems.
suspension system,Simulink simulation,stability,firing accuracy
TJ811
A
1002-6886(2016)04-0028-04
許奎(1989-),男,在讀碩士研究生,研究方向:混合動(dòng)力推進(jìn)總體技術(shù)。
2016-01-15
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
