外骨骼機器人半徑輪繩輪驅動技術研究
2016-08-16 09:05:07宋遒志
現代機械 2016年4期
王 宇,宋遒志
(北京理工大學機電學院,北京100081)
?
外骨骼機器人半徑輪繩輪驅動技術研究
王宇,宋遒志
(北京理工大學機電學院,北京100081)
通過傾角計測得人體抓舉重物過程中肘關節和肩關節的角度變化曲線,在SolidWorks中建立上肢三維模型,運用ADAMS仿真計算出抓取重物時的關節力矩,設計得到變半徑繩輪的外形輪廓坐標。在相同條件下對比等半徑輪驅動時所需要的功率,變半徑輪繩輪驅動方式具有有效節能的優點。
外骨骼機器人動力學繩輪驅動凸輪
0 引言
外骨骼機器人實質上是一種可穿戴機器人[1-3]。外骨骼機器人關節驅動技術是外骨骼機器人研制的核心技術,是外骨骼機器人能否完成對人體抓舉重物進行合理助力的關鍵性技術。外骨骼機器人的驅動結構主要包括液壓缸直接驅動結構、電機帶動滾珠絲杠、減速器驅動結構、氣動人工肌肉驅動結構以及繩輪驅動結構[4]。本文主要的研究對象為繩輪驅動結構。
繩輪驅動結構能夠通過繩索把動力傳到外骨骼機器人的各個關節,它具有精度較高,運動靈活的特點,能減輕機械臂重量,提高機械臂負載能力,且具有一定的抗干擾能力。與傳統驅動方式相比,它還有清潔、噪聲小、制造維護費用低等優點[5]。鑒于以上優點國內外對繩輪驅動技術作了很多研究,例如:NIST、南洋理工大學、北京航空航天大學等都將繩輪驅動技術運用到機械手臂的驅動上。
關節驅動的結構形式對系統的控制策略、功率損耗都有重要影響。外骨骼機器人的動力元件一般為可移動電源,它承載的能量有限。合理的關節驅動結構能夠提升能量的利用率,對外骨骼機器人的發展有著重要現實意義。本文通過分析外骨骼機器人抓舉重物過程中力矩的變化規律,設計一種半徑輪,并研究其對系統功率的影響。
1 關節驅動分析
1.1自由度分析
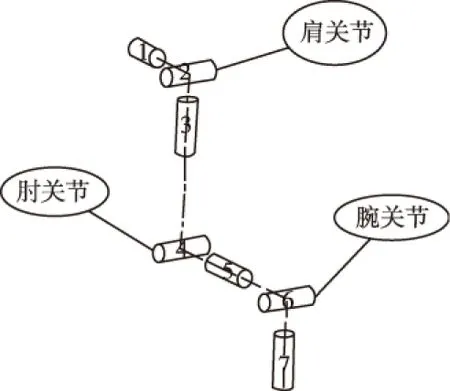
圖1 自由度示意圖
人體上肢的組成部分包括:肩部,上臂、肘部、前臂和手部。上肢的骨骼的關節主要有胸鎖關節,肩關節、肘關節和手關節[6]。如圖1所示,肩關節在人們日常活動中具有三個自由度,1、2、3分別為肩關節內收外展、屈伸和旋轉;肘關節在日常生活中具有兩個自由度,4、5分別為肘關節屈伸和內收外展;腕關節日常生活中具有兩個自由度,6、7分別為腕關節左右旋轉和上下旋轉。考慮抓舉的實際情況,我們只考慮肘關節兩個自由度以及肩關節三個自由度。
1.2關節驅動方式選擇
機器人關節處的液壓驅動方式可分為四種形式:直接驅動方式、等半徑驅動輪驅動方式、變半徑輪驅動輪驅動方式和換向輪+驅動輪驅動方式。
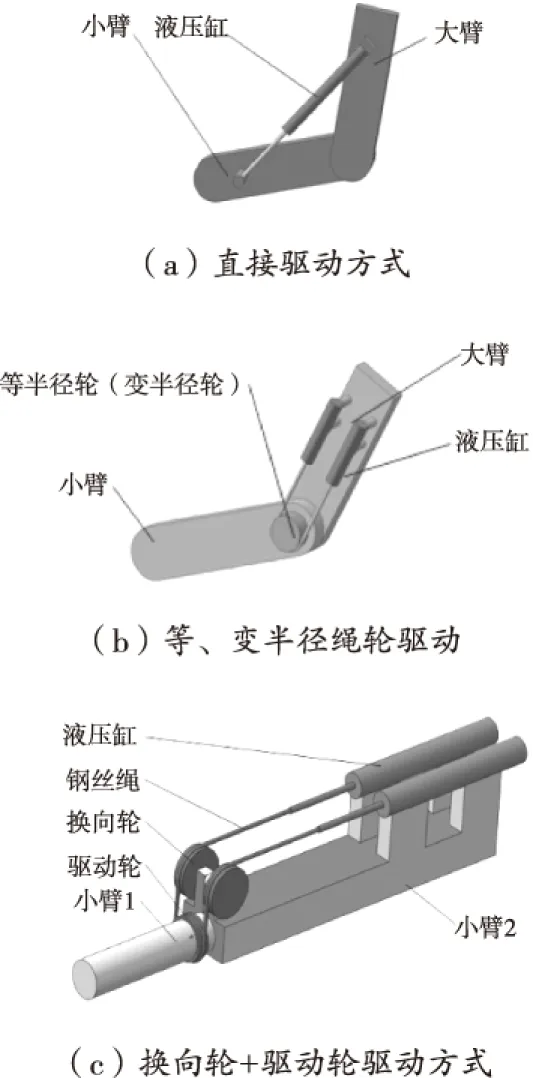
圖2 驅動方式示意圖
直接驅動方式如圖2(a)所示,結構簡單、重量輕、能量損失少,但是工作時存在死點、不能有效節能、控制難度大。等半徑繩輪驅動和變半徑繩輪驅動方式如圖2(b)所示。與等半徑輪驅動方式的不同之處是,變半徑輪驅動方式所使用的驅動輪是凸輪或者偏心輪,其突出的優點是可以通過控制驅動輪的半徑變化,產生所需要的不同力矩,可以實現有效節能。缺點是其結構復雜。考慮在抓取重物過程中,肘關節屈伸和肩關節屈伸所需要的力矩較大,而肘關節旋轉,肩關節收展和旋轉需要的力矩較小。在肘關節屈伸和肩關節屈伸這兩個自由度上,采用變半徑輪驅動方式。肩關節旋轉和收展,肘關節旋轉采用換向輪加等半徑輪繩輪驅動方式(圖2(c))。
本文主要對上肢外骨骼抓舉重物時矢狀面內的運動進行研究,所以只對變半徑輪繩輪驅動結構進行分析。
2 動力學分析
2.1肘關節、肩關節角速度和角加速度的測定
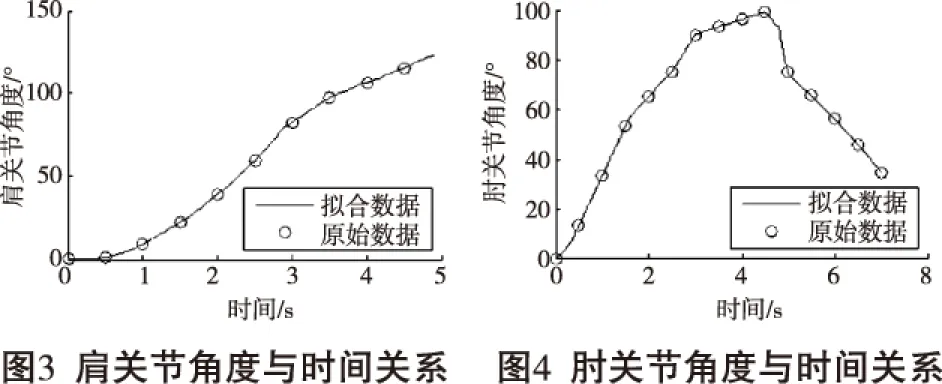
將兩個傾角計固定在人上肢的大臂和小臂上,測量人在由低到高搬運重物時大臂、小臂與豎直方夾角度與時間的關系。測量20組數據對其取平均值。由于測量過程中人不可能保證上肢在矢狀面內運動,為了減小誤差,我們將測量得到的角度在矢狀面內投影。肩關節、肘關節角度與時間的關系如圖3、圖4所示。將實驗得到的離散點擬合成曲線。
2.2關節力矩計算
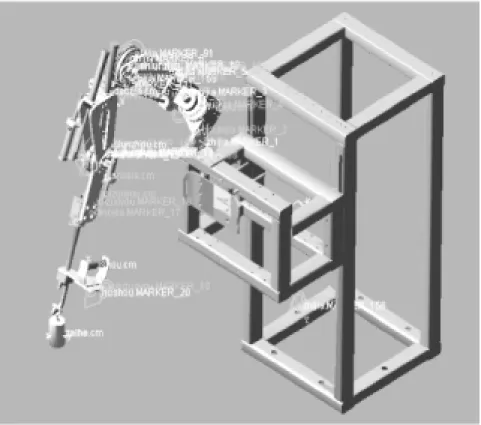
圖5 ADAMS仿真模型
如圖5所示,通過SolidWorks進行三維建模,將生成的三維模型導入ADAMS中。模型由支撐架部分、手臂部分以及負載部分組成。支撐架高度可以調節,可以適應1.6 m到1.9 m不同身高的人。大臂長400 mm,小臂部分(包含掛鉤)長573 mm。負載55 kg。在ADAMS中仿真抓舉55 kg的負載,仿真結果得到肩、肘關節所要的力矩。驅動函數由關節角度與時間的關系擬合而成。仿真結果如圖6、圖7所示。實線是ADAMS中仿真得到的力矩數據,虛線是MATLAB中7自由度多項式擬合結果。多項式擬合的函數與仿真曲線基本吻合,多項式擬合的函數代替仿真曲線,減少凸輪輪廓設計的計算量。
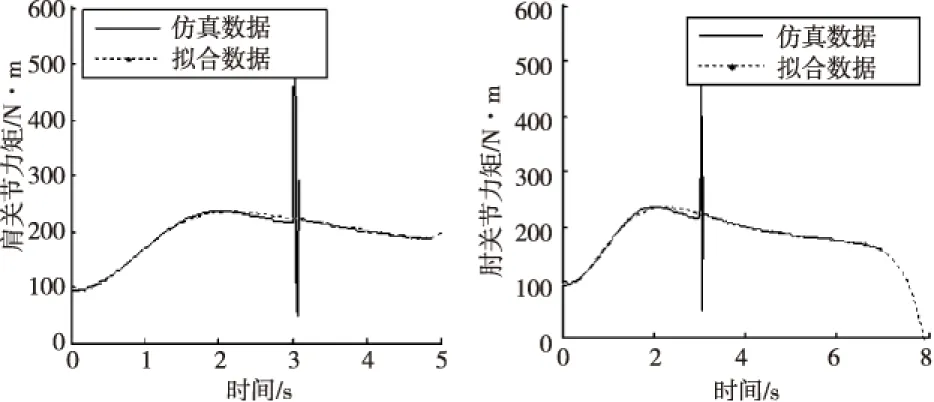
圖6 肩關節力矩 圖7 肘關節力矩
3 凸輪輪廓設計
得到了關節驅動力矩,通過解析法計算得到變半徑繩輪的外形輪廓。變半徑繩輪理論上講就是凸輪,其設計過程如圖8。
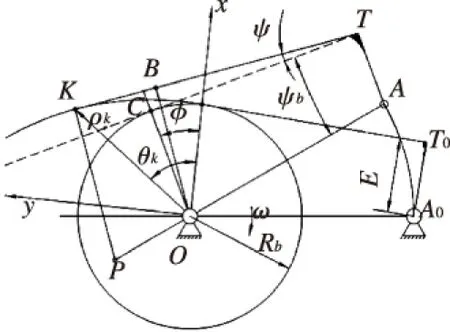
圖8 凸輪輪廓計算
如圖8所示,設凸輪的轉角為φ時,平底線與凸輪輪廓相切于K點,對應的初始位置平底線(虛線)與基圓相切于C點。兩平底線之間的夾角為從動件的對應角位移ψ。由O點作平底線的垂直線,相交于B點,則凸輪輪廓曲線上K點的極坐標矢量可由矢量三角形OBK確定[7-8]:
ρkeθk=LOBe(φ-ψ)+LBKe(φ-ψ+π/2)
(1)
其中矢量LOB、LBK的模為:
LOB=LOAsin(ψb-ψ)+E
(2)
LBK=LOPcos(ψb+ψ)
(3)
LOB為液壓缸作用力對關節中心的力臂,由多項式擬合的力矩函數除以液壓缸作用力得到。
公式中:
(4)
(5)
因此可得凸輪輪廓坐標計算式為:
(6)
在直角坐標系下,凸輪的坐標為:
(7)
由式(7)可以得到凸輪的坐標曲線如圖9、圖10所示。
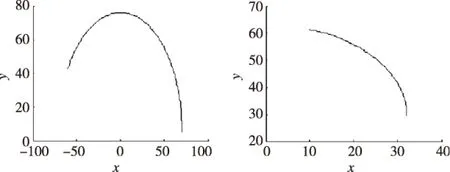
圖9 肩關節凸輪輪廓 圖10 肘關節凸輪輪廓
4 功率計算及對比分析
抓舉過程中,小臂與大臂僅在經過肩關節并且平行于矢狀面的平面內運動。不考慮肩關節收展及旋轉運動和肘關節旋轉運動。
以肘關節為例,計算抓舉過程中,肘關節所需要的功率。外骨骼結構確定后,系統壓強P壓恒定,液壓缸活塞面積A恒定,所以液壓缸提供的最大力為F肘=P壓A恒定。關節角速度為ω肘,肘關節變半徑繩輪的回轉半徑為ρ肘,可以計算得到肘關節功率P肘。同理,可計算得到肩關節功率P肩。
計算得到等半徑繩輪驅動和變半徑輪繩輪驅動的肩關節和肘關節功率如圖11、圖12所示,實線為變半徑輪的功率,虛線為等半徑輪的功率。圖11中,由于抓舉過程中負載相對于肩關節的力臂變化較小,肩關節處,等半徑繩輪驅動與變半徑繩輪驅動所需的功率基本一致,能量節約效果不明顯。如圖12所示,肘關節處,等半徑繩輪驅動方式與變半徑繩輪驅動方式所需要的功率有明顯差異,變半徑繩輪驅動所需要的功率少于等半徑繩輪驅動所需功率,實現有效節約功率。

圖11 肩關節功率 圖12 肘關節功率
5 結束語
通過以上分析研究,得到如下結論:
1)上肢外骨骼機器人采用變半徑輪繩輪驅動結構對肘關節的功率影響明顯,能夠提升功率的利用率,節約系統能量。肩關節節能效果不明顯。
2)分析了半徑輪繩輪驅動結構在外骨骼機器人關節驅動結構上運用的可行性,對外骨骼機器人關節驅動技術研究有一定的借鑒作用。
[1]Deng M J, Wang Z, He H H, et al. Design and weight lifting analysis of a strengthen upper limb exoskeleton robot[J].Applied Mechanics and Materials, 2013(437):695-699.
[2]李會營,王惠源,等.外骨骼機器人發展趨勢研究[J].機械工程師,2011(8):9-10.
[3]楊智勇,張靜,歸麗華,等.外骨骼機器人控制方法綜述[J].海軍航空工程學院學報,2009,24(5):520-526.
[4]楊正東,沈強,王人成.外骨骼關節驅動機構設計方案的模糊綜合評價:第八屆北京國際康復論壇論文集[C].中國康復理論與實踐,2013(9):915-921.
[5]顧鎮兵,程濤.外骨骼負重機器人液壓缸的設計[J].機械與電子,2012(7):77-80.
[6]Martinez F, Retolaza I, Pujana-Arrese A, et al. Design of a five actuated DoF upper limb exoskeleton oriented to workplace help[C]// 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. Scottsdale:IEEE, 2008:169-174.
[7]劉昌棋,牧野洋,曹西京.凸輪機構設計[M].北京,機械工業出版社,2005:9-14.
[8]石永剛,吳央芳.凸輪機構設計與應用創新[M].北京,機械工業出版社,2007:111-112.
Sheave drive technology of exoskeleton robots
WANG Yu, SONG Qiuzhi
In this study, we measured the angle change of human elbow and shoulder joints when lifting heavy weights by inclinometer, established the 3D model of human upper limbs in SolidWorks, calculated the joint torque when lifting heavy weights by ADAMS simulation, and obtained the contour coordinates of the variable-radius sheave. Under the same conditions, the variable-radius sheave is more energy efficient than the equal-radius sheave.
exoskeleton robot,dynamics,sheave drive,cam
TH122
A
1002-6886(2016)04-0010-04
王宇(1989-),男,內蒙古包頭市人,北京理工大學機電學院在讀碩士研究生,研究方向為外骨骼助力機器人。
2015-12-24
