基于非對稱夾持的壓電旋轉驅動器設計
2016-08-16 07:09:54溫建明程光明馬繼杰闞君武
中國機械工程 2016年8期
關鍵詞:晶片
溫建明 程光明 馬繼杰 曾 平 闞君武
浙江師范大學,金華,321004
?
基于非對稱夾持的壓電旋轉驅動器設計
溫建明程光明馬繼杰曾平闞君武
浙江師范大學,金華,321004
設計了一種新型非對稱夾持壓電旋轉驅動器。通過對稱性電信號激勵粘貼在基板上的壓電晶片,使基板自由端帶動質量塊非對稱地往復擺動,進而產生非對稱的慣性驅動力,實現壓電旋轉驅動器的定向運動。研制了非對稱壓電慣性旋轉驅動器樣機,搭建了驅動器的測試系統,對驅動器步長、摩擦力矩、載荷特性等進行了測試。結果表明,驅動器在電壓為15 V、頻率為10 Hz、夾持差為3 mm時,步長分辨率為1.82 μrad,摩擦力矩為2.475 N·mm條件下的最大輸出載荷為0.122 N。
壓電;慣性;驅動器;非對稱
0 引言
近年來,在超精密加工、空間激光通訊跟蹤、掃描電鏡等領域,以壓電陶瓷為核心驅動元件的高精度定位驅動器得到了廣泛應用[1-2]。根據工作機理的不同,壓電驅動器一般可分為超聲波驅動器、直動式驅動器[3]、步進式驅動器和慣性式驅動器。其中,壓電慣性驅動器具有結構簡單、響應特性好、易于控制等特點,適合于高分辨率、大行程的應用場合,作為微小機械、精密機械的移動裝置,受到相關研究人員的關注。東京大學的課題組首先對壓電慣性驅動技術進行了系統研究[4-6]。1989年,Higuchi等發表了在微機器人手臂上應用壓電慣性驅動機構的文章,討論了壓電疊堆快速變形特點。1995年,該課題組將開發的壓電慣性驅動機構在自動裝配線上進行了應用嘗試。此后,利用壓電慣性驅動原理構造的驅動器得到了快速的發展,受到越來越多研究人員的關注[7-11]。與國外相比,國內關于慣性驅動器的研究起步稍晚,1999年,清華大學李勇率先將壓電慣性驅動技術應用于微進給定位機構[12]。
目前,國內外研究的壓電慣性驅動器,根據驅動機理一般可分為兩類,一種通過非對稱電信號激勵壓電晶片產生不同的慣性力,與摩擦力配合實現驅動的定向運動,稱為電控式。比較常見的慣性沖擊式[13-14]和粘滑式[15-17]都屬于這種類型。另一種采用對稱性電信號激勵,產生往復相同的慣性力,通過控制機構與支撐面之間的摩擦力,實現驅動器的定向運動,稱為摩擦力控制式[18-19]。本文從機械控制角度出發,采用非對稱機械夾持結構,通過對稱性電信號激勵壓電晶片,使基板自由端帶動質量塊非對稱往復擺動,進而產生非對稱的慣性驅動力,實現驅動器的定向運動。
1 工作機理
旋轉驅動器工作機理如圖1所示。驅動信號為方波,驅動器的運動過程如下:
(1)當驅動電壓為0時,驅動器保持原始狀態,不形成運動。
(2)當信號從o點階躍到a點時,壓電晶片快速變形帶動質量塊產生的慣性力形成逆時針的驅動力矩。當驅動力矩大于摩擦力矩時,驅動器逆時針轉動θ1,如圖1b所示。當信號從a點到b點時,電壓保持不變,驅動器不產生運動。
(3)當信號從b點階躍到c點時,壓電晶片快速變形帶動質量塊產生的慣性力形成順時針的驅動力矩。當驅動力矩大于摩擦力矩時,驅動器順時針轉動θ2,如圖1c所示。由于存在夾持差,基板順時針彎曲時,端部變形大,產生的慣性力也大,故逆時針大于順時針驅動力矩,驅動器順時針轉動角度θ3(θ1與θ2的差值)。當信號從c點到d點時,電壓保持不變,驅動器不產生運動。
(4)當信號從d點變化到e點時,壓電晶片恢復到原始狀態,如圖1d所示。
重復(2)~(4)的過程,驅動器順時針連續轉動。
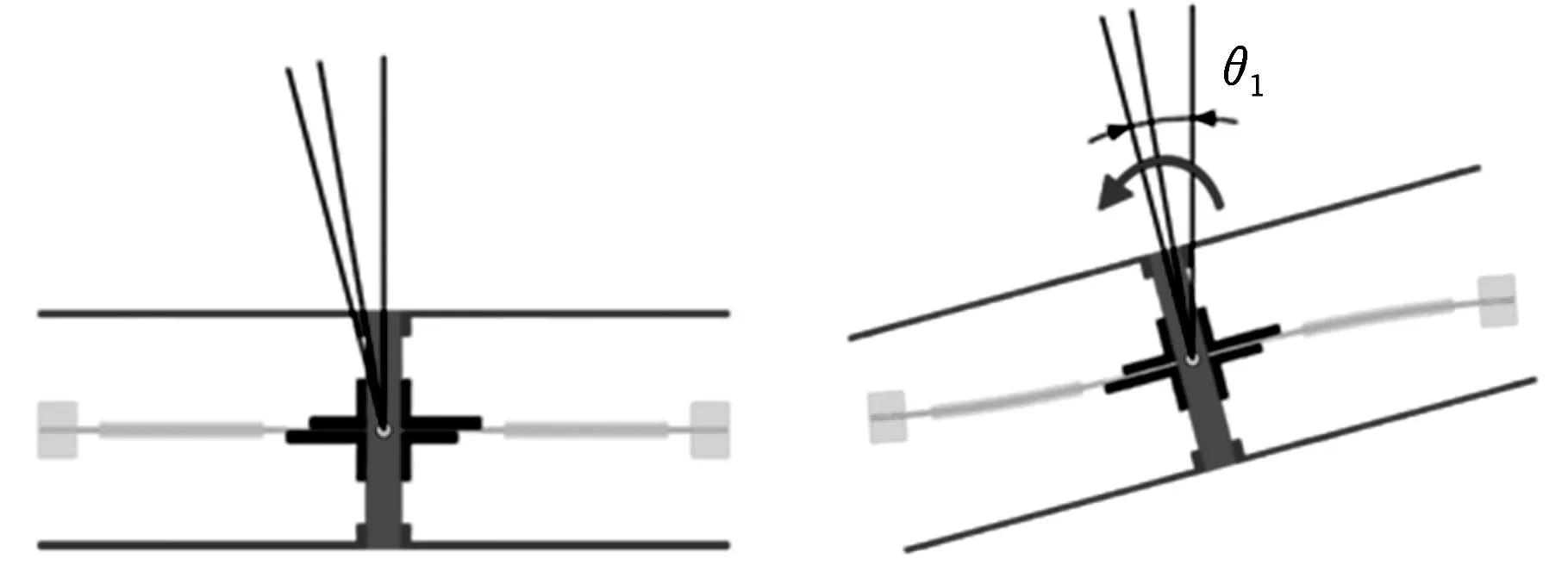
(a)原始位置 (b)逆時針轉動
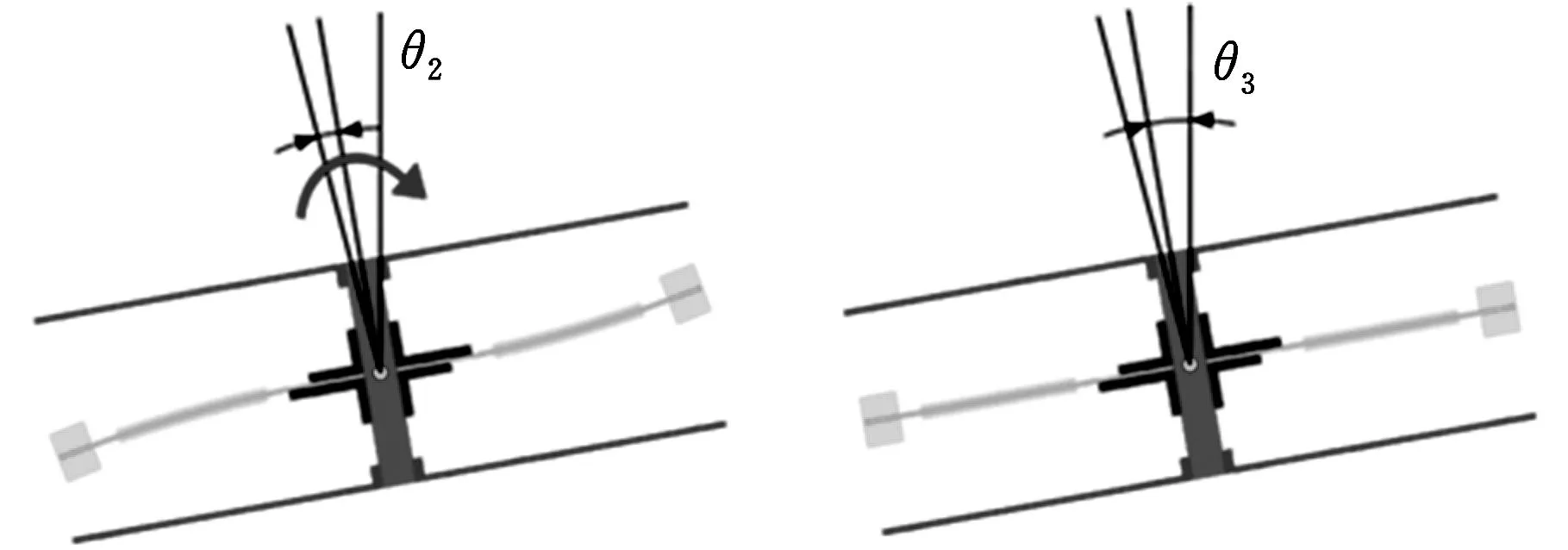
(c)順時針轉動 (d)實際位移
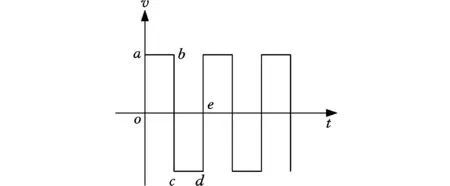
(e)驅動信號
2 理論分析
非對稱夾持機構是形成壓電旋轉驅動器運動的核心機構。如圖2所示,夾持機構由具有夾持差的夾持臂、基板、壓電晶片和質量塊組成。圖2中,l為懸臂長度,a1為壓電晶片中心至固定端距離,lc為壓電晶片長度,Δx為夾持差,hm為基板厚度,hc為壓電晶片厚度。當施加對稱性電信號激勵,壓電晶片沿長度方向伸縮變形產生的力為[20]
(1)
式中,ε為相對介電磁導率;ε0為介電常數;Sc為壓電晶片橫截面積;E為施加在壓電晶片上的電場強度;U為驅動電壓;d31為壓電常數。
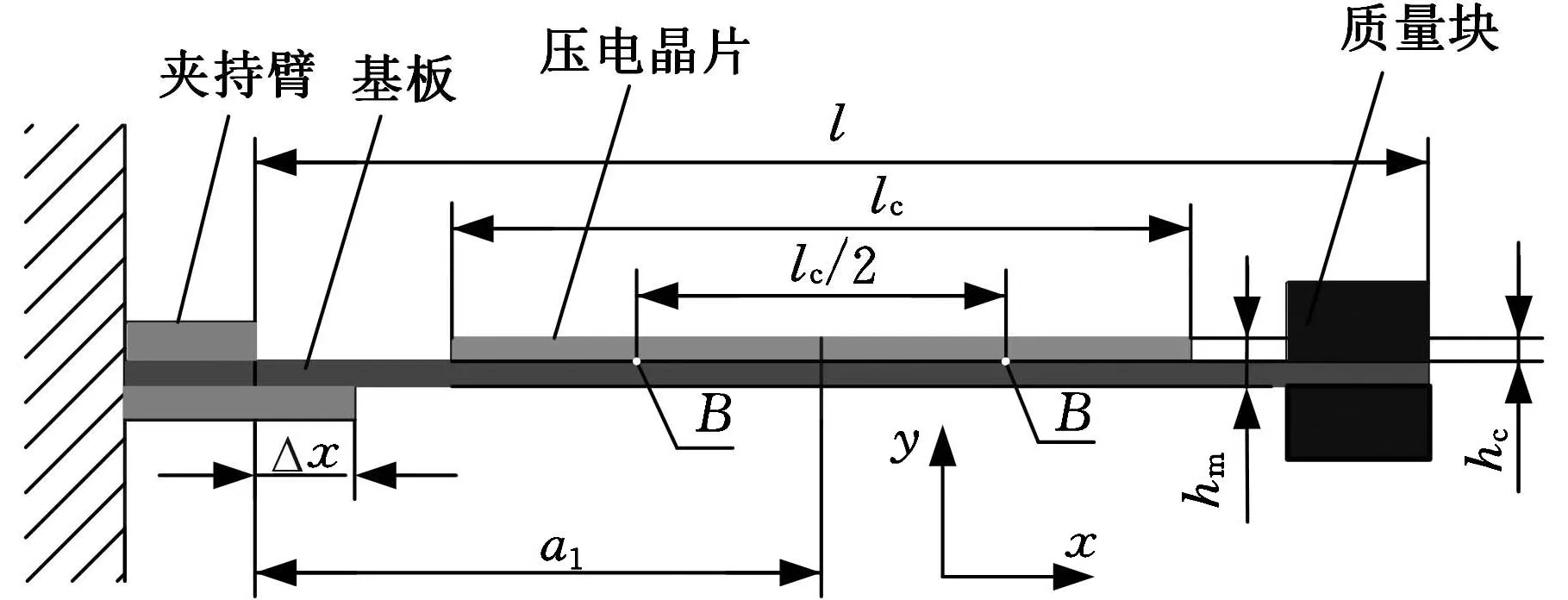
圖2 非對稱夾持機構結構簡圖
由于壓電晶片和基板間通過導電膠粘接,所以壓電晶片的上表面能自由伸縮變形,伸縮力Fc作用在基板上形成彎矩,可等效為2個分別作用在B點的彎矩MB。以基板中間層為基準,不考慮膠層影響,基板端部撓曲線方程為
(2)


(3)
M1=M2=MBam1=a1-lc/4
am2=a1+lc/4
則式(3)可進一步簡化為
(4)
x=l時
(5)
自由端等效彎力Fd為
(6)
即
Fd=3MBlc(l-a1)/l3
(7)
由伸縮力產生的彎曲力矩可表示為
MB=Fc(hm+hc)/2
(8)
整理可得等效彎力表達式:
(9)
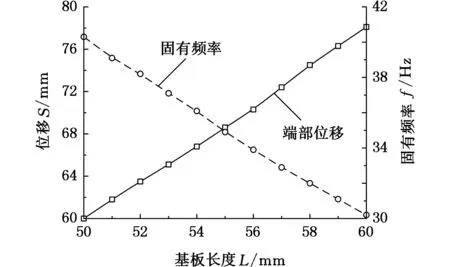
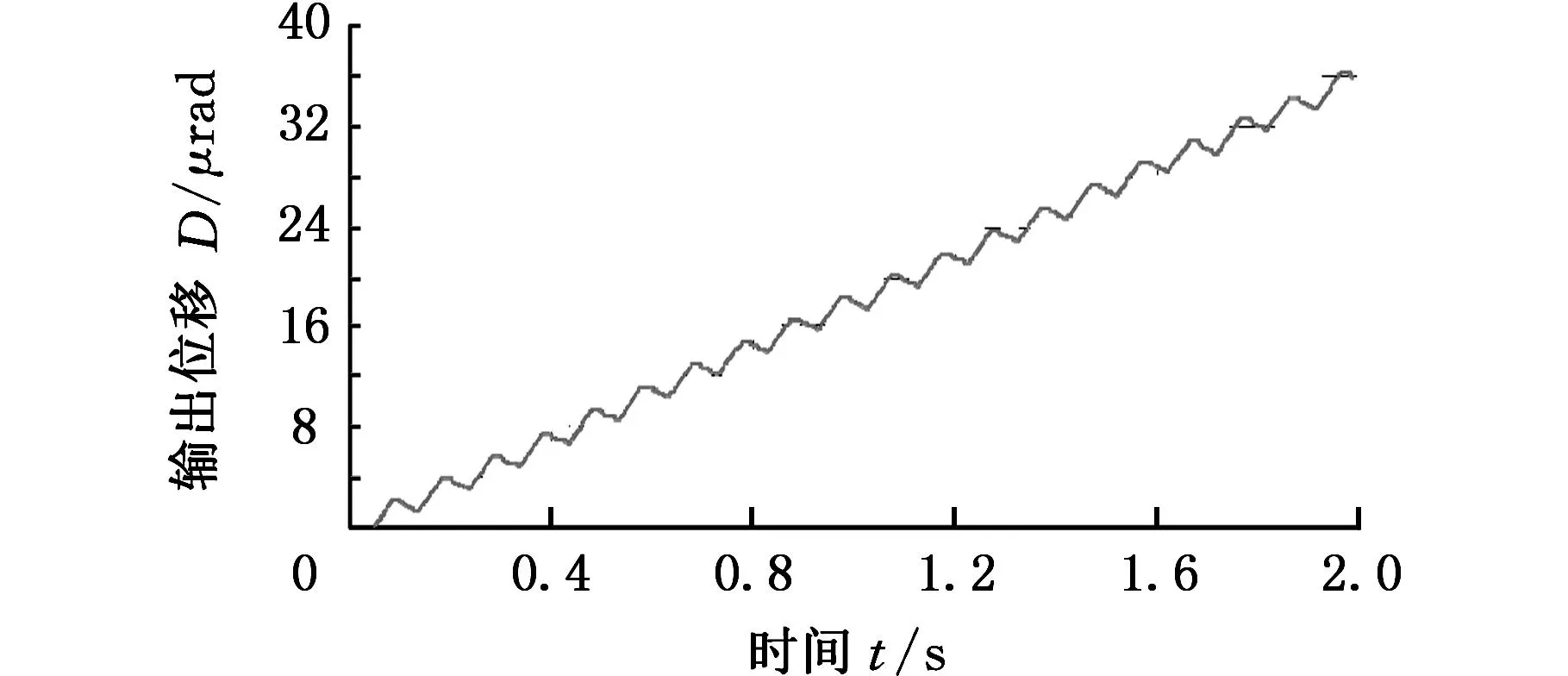
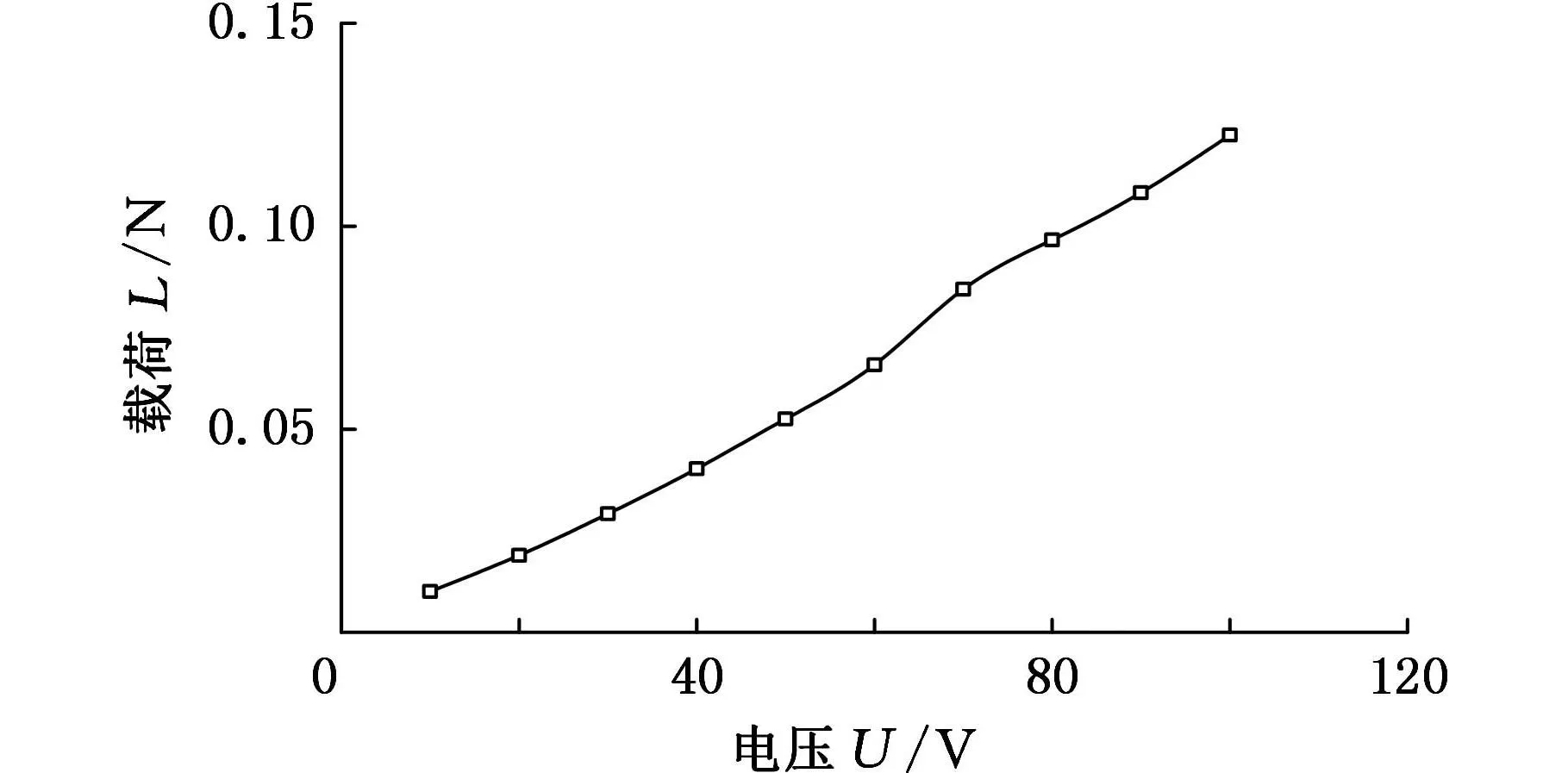
由于基板由上向下彎曲時,懸臂長度由l變為l-Δx,壓電晶片中心至固定端距離由a1變為a1-Δx,則由式(9)可知Fd1 從理論分析可以看出,夾持機構的參數對驅動器性能有重要影響。在驅動器整體結構設計之前對夾持機構進行仿真分析,通過仿真分析獲取設計參數,各部件材料參數如表1所示。 表1 各部分材料參數 非對稱夾持機構仿真模型尺寸參數:有效基板60 mm×20 mm×0.3 mm、壓電陶瓷40 mm×20 mm×0.2 mm、質量塊20 mm×10 mm×4 mm。 3.1陶瓷貼片距離對自由端位移及固有頻率的影響 分別對貼片距離(壓電晶片與夾持臂端部的距離)為0~7 mm的夾持機構進行仿真,50 V直流驅動,貼片距離對自由端位移和一階固有頻率的影響如圖3所示。由圖3可知,隨著貼片距離的變小,自由端位移和一階固有頻率均逐漸變大,故通過減小貼片距離可以獲取更大的輸出位移和固有頻率。但貼片距離為0時,基板彎曲時夾持臂端部會擠壓壓電晶片。 圖3 貼片距離與位移及固有頻率關系 3.2基板長度對自由端位移及一階固有頻率的影響 仿真參數:貼片距離為1 mm,基板長度為50~60 mm,50 V直流驅動,基板長度對自由端位移和一階固有頻率的影響如圖4所示。由圖4可知,隨著基板長度的增大,自由端位移逐漸增大,一階固有頻率逐漸減小。 圖4 基板長度位移及固有頻率關系 3.3模態分析 圖5所示為驅動臂的前兩階振型,相應的諧振頻率為34.76 Hz、267.46 Hz。由圖5可知,當工作頻率不超過34.76 Hz時,驅動臂振動形式為一階振型,變形方向為垂直于基板厚度方向,變形近似線性,端部質量塊在該方向上振幅最大。隨著頻率的升高,驅動臂振型中產生了寬度及軸向扭轉,使端部慣性力有寬度及軸向的分量,減弱了驅動力。因此驅動器應工作在一階振型,驅動頻率應低于34 Hz。 (a)一階振型 (b)二階振型圖5 驅動臂的前二階振型 4.1樣機制作 如圖6所示,驅動器樣機主要包含旋轉主體、橫梁、指針、軸承、支承梁、摩擦力調節裝置和底座。支承梁固定在底座上,橫梁通過螺栓安裝在支承梁上。旋轉主體通過對稱布置的軸承安裝在橫梁和底座之間,在摩擦力調節裝置的作用下,可繞中心軸形成穩定的旋轉運動。軸的頂端連接著一個指針,用于配合激光傳感器來觀察驅動器的運動。指針末端上激光測試點到軸的旋轉中心的距離,即驅動器有效旋轉半徑為55 mm。 圖6 驅動器樣機 4.2測試系統組成 整個裝置被放置在DVID氣浮隔振臺上,安捷倫33522A 信號發生器產生的信號,經PI的功率放大器E-472放大后施加給壓電晶片。由于旋轉驅動器步長很小,為方便測量,旋轉運動近似視為直線運動,LK-G 5000激光位移傳感器用來檢測旋轉驅動器的輸出位移,通過轉換可計算出對應的旋轉步長。 s=l/r (10) 式中,s為驅動器旋轉步長,μrad;l為標尺端部的位移,μm;r為測試標尺長度,m。 4.3驅動器頻率特性 在60 V方波信號激勵,無摩擦力矩條件下,測試了驅動器的頻率特性曲線,測試結果如圖7所示。圖7表明,驅動器的旋轉步長輸出在起始階段隨著驅動頻率的增加而增加,當驅動頻率接近32 Hz時,驅動器的旋轉步長輸出均達到最大值709.1 μrad此時的驅動頻率接近振子的一階固有頻率。在該固有頻率之后,旋轉步長隨著驅動頻率增加迅速減小。分析得出,這是由于驅動頻率大于一階固有頻率后,壓電雙晶片振子不再產生一階純彎曲形變,而是產生一階和二階振動模態的混合形變,從而減小了在驅動器運動方向的驅動力輸出。 圖7 驅動器頻率特性曲線 4.4驅動器摩擦力矩特性 摩擦力矩作為驅動器運動狀態的重要影響因素,可通過摩擦力調節裝置進行調節,從而更好地控制驅動器的運動狀態和步距輸出。在60 V、10 Hz方波信號激勵,測試了不同摩擦力矩條件下驅動器的旋轉步長,結果如圖8所示。測試結果表明,驅動器能在摩擦力矩0~5.445 N·mm范圍內實現穩定步距輸出,在摩擦力矩1.8 N·mm附近,驅動器達到平均輸出步距角最大值。在最大值點之后,驅動器的旋轉步長輸出隨著摩擦力矩的增大而減小。 圖8 驅動器摩擦力矩特性曲線 4.5驅動器步長分辨率特性 在驅動信號電壓為15 V,頻率為10 Hz,夾持差為3 mm條件下,測試了輸出位移與時間的關系,如圖9所示。從圖9可以看出,驅動器運動步距穩定,20步(2 s)輸出位移36.4 μrad,平均每步步長為1.82 μrad,最大單步絕對誤差率為0.83%。此外,從圖9還可以看出,在運動過程中,驅動器有回退現象,最大回退率為21.6%。 圖9 驅動器步長分辨率曲線 4.6驅動器載荷輸出特性 輸出載荷是評價驅動器性能指標的重要參數。在32 Hz方波信號激勵,摩擦力矩為2.475 N·mm條件下,測試了驅動器的最大輸出載荷,測試結果如圖10所示。從圖10可知,驅動器的輸出載荷均隨著電壓的升高而平穩增大,當電壓升高至100 V時,驅動器的最大輸出載荷為達0.122 N。 圖10 驅動器載荷特性曲線 利用非對稱機械結構實現了壓電雙晶片在對稱性電信號激勵下產生非對稱慣性驅動力,進而實現了機構的定向運動。研制了非對稱壓電慣性旋轉驅動器并進行了步長、轉速以及載荷特性試驗測試。試驗表明,研制的旋轉驅動器運動步長可達1.82 μrad,最大輸出載荷為0.122 N。 [1]于旭東,龍興武. 機抖激光陀螺壓電陶瓷驅動器參數設計[J].儀器儀表學報,2013,34(6): 1428-1433. Yu Xudong,Long Xingwu. Parameter Design of Piezoelectric Actuator for Dithered Ring Laser Gyroscope [J]. Chinese Journal of Scientific Instrument, 2013, 34(6): 1428-1433. [2]張棟,張玉林,李現明,等. 掃描電化學顯微鏡壓電工作臺的建模與控制[J]. 儀器儀表學報, 2009, 30(12): 2669-2675. Zhang Dong, Zhang Yulin, Li Xianming, et al. Modeling and Control of SECM Piezo-stage[J]. Chinese Journal of Scientific Instrument, 2009,30(12): 2669-2675. [3]于志遠,姚曉先,宋曉東. 基于柔性鉸鏈的微位移放大機構設計[J].儀器儀表學報,2011,30(9): 1818-1822. Yu Zhiyuan, Yao Xiaoxian, Song Xiaodong. Design of Micro-displacement Amplifier Based on Flexure Hinges [J]. Chinese Journal of Scientific Instrument, 2011, 30(9): 1818-1822. [4]Yutaka Yamagata, Toshiro Higuchi. A Micropositioning Device for Precision Automatic Assembly Using Impact Force of Piezoelectric Elements [J]. Proceedings of the IEEE International Conference on Robotics and Automation, 1995, 1: 666-671. [5]Yasuhiro Okamoto, Ryuichi Yoshida. Development of Linear Actuators Using Piezoelectric Elements [J]. Electronics and Communications in Japan, Part 3, 1998, 81(11): 11-17. [6]Takeshi Morita,Ryuichi Yoshida, Yasuhiro Okamoto, et al. Three DOF Parallel Link Mechanism Utilizing Smooth Impact Drive Mechanism[J]. Precision Engineering Journal of the International Societies for Precision Engineering and Nanotechnology, 2002, 26: 289-295. [7]Takuma Nishimura, HiroshiHosaka, Takeshi Morita. Resonant-type Smooth Impact Drive Mechanism(SIDM) Actuator Using a Bolt-clamped Langevin Transducer [J]. Ultrasonics,2012, 52(1):75-80. [8]Paik Dong-Soo, Yoo Kyoung-Ho, Kang Chong-Yun. Multilayer Piezoelectric Linear Ultrasonic Motor for Camera Module [J]. J Electroceram.2009,22(1/3):346-351. [9]Sharp S L, Paine J S N, Blotter J D. Design of a Linear Ultrasonic Piezoelectric Motor[J]. Journal of Intelligent Material Systems & Structures, 2010, 21(21):961-973. [11]Yang Chia-Feng, Jeng Shyr-Long, Chieng Wei-Hua. Motion Behavior of Triangular Waveform Excitation Input in an Operating Impact Drive Mechanism[J]. Sensors and Actuators A, 2011, 116(1): 66-77. [12]李勇. 蠕動式壓電/電致伸縮微進給定位機構的研究進展[J]. 中國機械工程,1999,10(12):1410-1414. Li Yong. Research of Inchworm Type of Piezoelectric/electrostriction Micro Feed and Positioning Mechanisms [J]. China Mechanical Engineering, 1999,10(12):1410-1414. [13]劉向鋒,劉大偉,高志,等. 新型壓電旋轉驅動器的設計與試驗研究[J].機械工程學報, 2010,46(1):169-174. Liu Xiangfeng, Liu Dawei, Gao Zhi, et al. Design and Experimental Research of a New Type of Piezoelectric Rotary Actuator[J]. Journey of Mechanical Engineering, 2010,46(1): 169-174. [14]劉品寬,溫志杰,孫立寧.壓電雙層膜驅動管內移動微小型機器人的研究[J].科學通報,2009,54(15) 2257-2263. Liu Pinkuan, Wen Zhijie, Sun Lining. Study on Piezoelectric Bimorph Actuation of the in Pipe Microrobot [J]. Chinese Science Bulletin, 2009,54(15):2257-2263. [15]姜楠, 劉俊標. 旋轉型壓電慣性沖擊馬達的工作特性[J].光學精密工程,2009,17(2):350-355. Jiang Nan, Liu Junbiao. Operating Characteristic of Rotary Piezo Impact Drive Mechanism[J]. Optics and Precision Engineering, 2009,17(2):350-355. [16]杜啟亮,張勤,田聯房, 等. 壓電陶瓷驅動微小型機器人的運動分析與仿真[J]. 西南交通大學學報,2011,46(3):415- 421 Du Qiliang, Zhang Qin,Tian Lianfang, et al. Locomotion Analysis and Simulation of Piezo-driven Miniature Robot[J]. Journey of Southwest Jiaotong University, 2011,46(3):415-421. [17]莫岳平,靳宏, 趙夙, 等. 一種新型壓電超聲直線電機的研究[J].微電機,2011,44(8):11-13. Mo Yueping, Jin Hong, Zhao Su, et al. Study on a New Kind Piezoelectric Ultrasonic Linear Motor [J]. Micoromotors,2011,44(8):11-13. [18]溫建明,馬繼杰,程光明,等. 平面三自由度慣性壓電疊堆移動機構研究[J]. 中國機械工程, 2010,21(18):2172-2175. Wen Jianming, Ma Jijie, Cheng Guangming, et al. Research on Planar 3-DOF Inertial Piezoelectric Stack Moving Mechanisms [J]. China Mechanical Engineering, 2010,21(18):2172-2175. [19]溫建明, 馬繼杰, 曾平, 等. 壓電旋轉驅動器制作及性能測試[J]. 光學精密工程,2013,21(1):131-136. Wen Jianming, Ma Jijie, Zeng Ping, et al. Machining and Functional Testing of Piezoelectric Rotary Actuator [J]. Optics and Precision Engineering, 2013,21(1):131-136. [20]Vetrov A A, Volkonskii V B, Svistunov D V. Calculation, Fabrication, and Study of Waveguides for an Integrated-optics Gyroscope [J]. J. Opt. Technol., 1999,66: 428-433. (編輯張洋) Design of Piezoelectric Rotary Actuator Based on Asymmetric Clamping Mechanism Wen JianmingCheng GuangmingMa JijieZeng PingKan Junwu Zhejiang Normal University,Jinhua,Zhejiang,321004 A novel piezoelectric inertial rotary actuator was presented herein based on asymmetric clamping mechanism. The actuator can achieve unidirectional rotation movement by the reciprocating swing of the masses to produce asymmetric inertial impact force when the piezoelectric bimorph pasted on the substrate was applied to the symmetric electrical signals. A prototype was fabricated and a series of experiments were conducted to evaluate its performance in terms of angular displacement, friction torque, and load characteristics. The results show that the angular displacement resolution of 1.82 μrad is obtained by applied square wave of 15 V, frequency of 10 Hz under the clamping difference of 3 mm and maximum output load is 0.122 N under the friction torque of 2.475 N·mm. piezoelectric; inertial; actuator; asymmetric 溫建明,男,1980年生。浙江師范大學工學院副教授。主要研究方向為壓電驅動與控制技術。程光明,男,1957年生。浙江師范大學工學院教授、博士研究生導師。馬繼杰(通信作者),男,1980年生。浙江師范大學工學院講師。曾平,女,1957年生。浙江師范大學工學院教授、博士研究生導師。闞君武,1965年生。浙江師范大學工學院教授、博士研究生導師。 2015-04-07 國家自然科學基金資助項目(51205369,51507154);浙江省自然基金資助項目(LY15E050010) TM384; TH703.8 10.3969/j.issn.1004-132X.2016.08.0063 夾持機構仿真分析



4 實驗測試



5 結語
猜你喜歡
電子器件(2021年4期)2021-10-26 12:27:18
海洋工程裝備與技術(2020年6期)2020-03-09 00:17:16
兵器裝備工程學報(2019年6期)2019-07-05 00:40:48
測控技術(2018年8期)2018-11-25 07:42:16
電子工業專用設備(2016年8期)2016-08-24 09:39:59
電子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04
振動、測試與診斷(2014年1期)2014-03-01 01:13:42
航天器環境工程(2011年4期)2011-06-08 05:03:08
電子工業專用設備(2011年10期)2011-06-04 04:36:48
