高海況下拖曳陣陣形擾動及接收信號特性研究*
2016-08-11 06:19:44徐雅南
艦船電子工程 2016年4期
徐雅南
(杭州應用聲學研究所 杭州 310012)
?
高海況下拖曳陣陣形擾動及接收信號特性研究*
徐雅南
(杭州應用聲學研究所杭州310012)
摘要為進一步提高拖曳線列陣水下工作性能,分析了高海況下拖船的運動規律,提出一種拖曳線列陣陣形擾動模型。該模型首先應用ITTC單參數標準海浪譜對隨機海浪作用下的船舶線性橫搖運動進行建模,然后根據應力波理論建立拖曳線列陣正弦隨機擾動模型,同時分析研究了陣形擾動下陣元接收信號特性,為陣形擾動影響下波束形成和線列陣功率譜的校正等打下基礎。
關鍵詞船舶橫搖; 正弦隨機擾動; 陣元時延; 陣元信號特性
Class NumberTP391
1 引言
拖曳陣通常采用長線陣結構,在拖曳過程中不可避免地會受到拖船運動、海流等因素的影響,使得基陣產生畸變。本文從拖船的搖擺運動出發,建立了線列陣陣形畸變模型。
2 船舶運動對線列陣陣形的影響
常見的拖曳線列陣系統如圖1(a)所示,線列陣由纜索拖在艦艇尾后,纜索一般為細長、柔性的圓柱形,隔振模塊夾在線列陣和纜索中間。纜索受拖船搖擺運動的作用力,及重力、水動力和慣性力作用。纜索所受拖船搖擺作用力和船舶的運動規律有關,相關理論證明船舶在波浪中受風、浪和流的作用會產生六個自由度的運動,即橫搖、縱搖、首搖、橫蕩、縱蕩、垂蕩六個自由度的運動又引起纜索的擺動。在高海況下,橫搖和縱搖對船舶運動的影響最大,橫搖和縱搖相比更加明顯,橫搖引起的橫搖角和橫搖力矩常常表現為一定的簡諧特性[1~2]。
拖船的橫搖力矩[1]作用在纜索拖曳的端點,通過纜索介質傳播到線列陣形成應力波[3],引起線列陣陣形畸變。另外,拖曳線列陣重力、水動力和慣性力作用下也會出現基陣變形。在高海況下,后者和前者相比對陣形變形影響較小,所以本文主要從船舶運動對基陣陣形的影響出發,研究線列陣陣形畸變問題,其效果圖如圖1(b)所示。
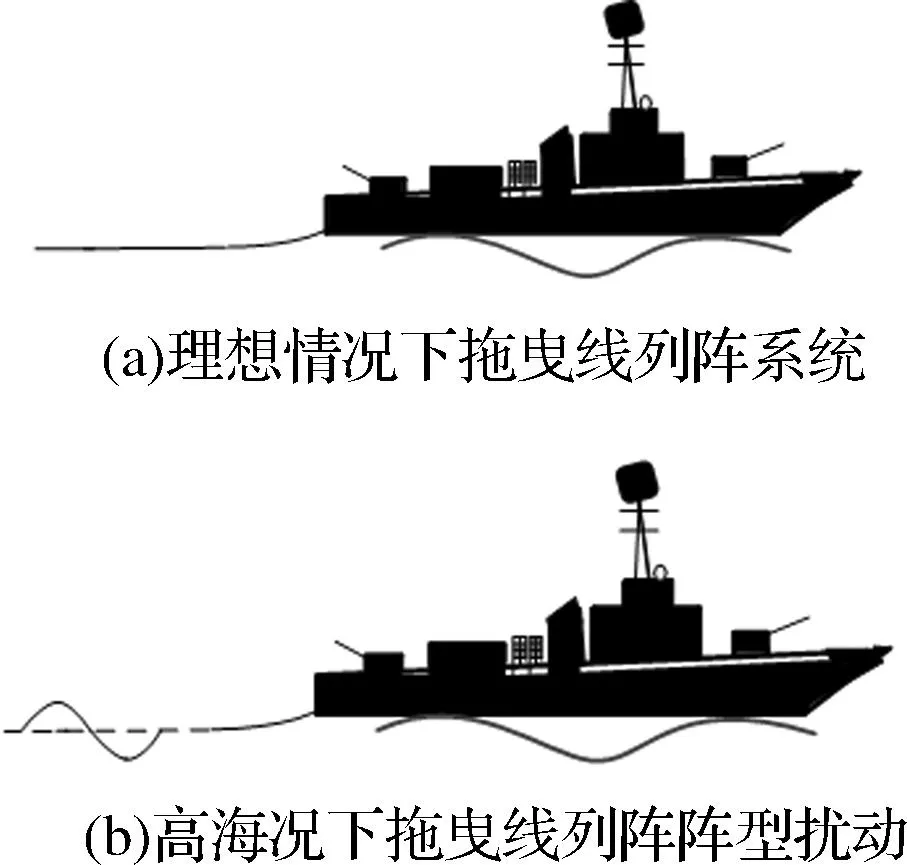
圖1 拖曳線列陣系統
2.1船舶運動規律研究
本文對船舶在不同船型、各種航態(不同海況、不同航速、不同航向)下呈現出的運動規律進行研究。根據波浪疊加理論[4],采用ITTC單參數標準海浪譜對隨機海浪作用下的船舶線性橫搖運動進行建模和仿真研究。
當船舶以航速V和浪向角ζ(遭遇角)航行時,波浪實際作用在船體上的頻率以遭遇頻率ωi進行響應。隨機海浪作用于船舶的橫搖有效波傾角實用仿真模型[1]為
(1)
其中,ωj表示第j個遭遇頻率,N表示遭遇頻率的個數,S(ωj)表示遭遇頻率下的波傾角能量譜,Kθ表示有效波傾系數,εj表示隨機相位,g表示重力加速度,ζ表示浪向角(遭遇角)。船舶與波浪之間的狀態圖如圖2所示。
如果船舶的橫搖運動角度較小,則可以應用線性橫搖理論來分析船舶的橫搖運動。按照牛頓第二定律,用船舶橫搖過程中的某一瞬時位置來分析船體的受力情況,如圖3,在建立橫搖運動微分方程時,假定重心G在載重水線面上。
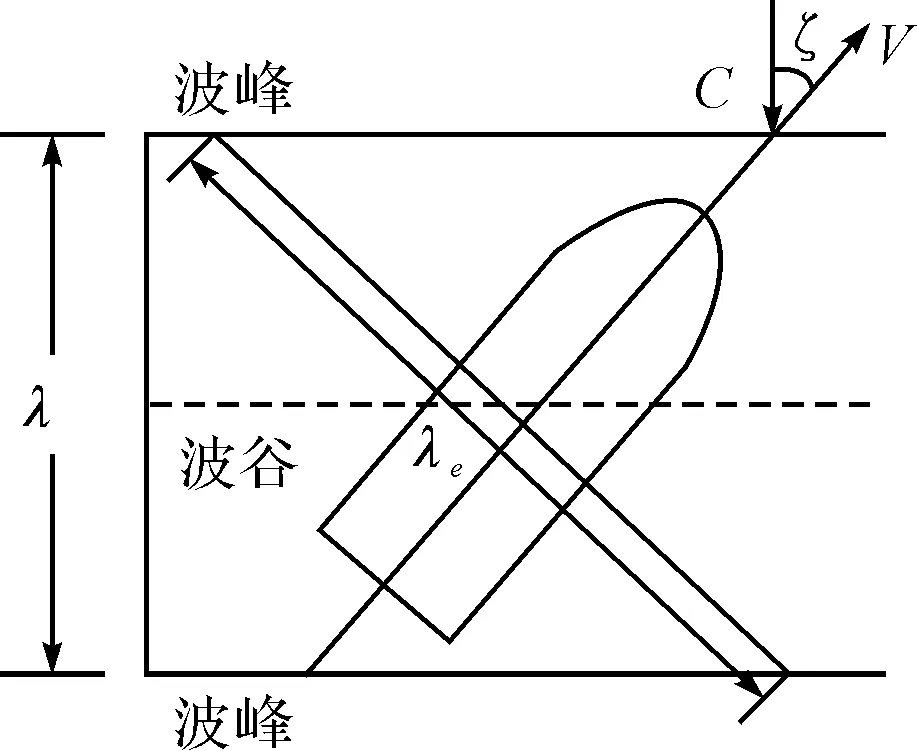
圖2 船舶的遭遇角
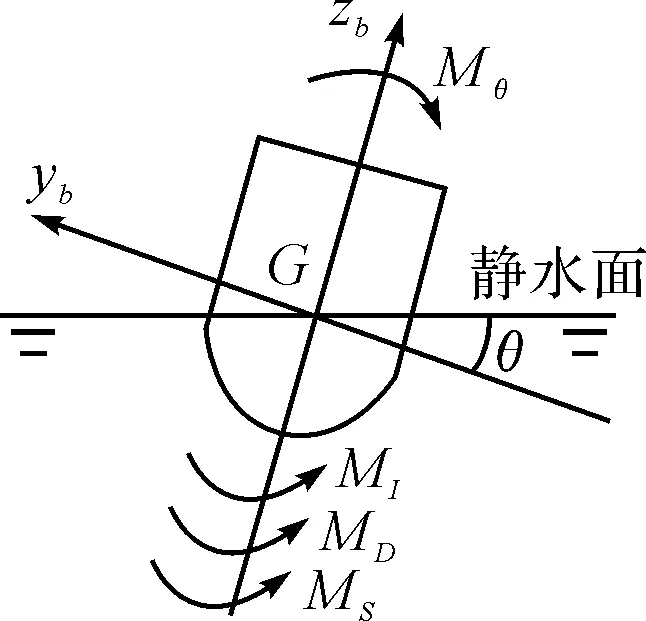
圖3 船舶的橫搖運動受力分析

MI+MD+MS=Mθ
(2)
(3)
其中,MI為慣性力矩,MD為阻尼力矩,MS為復原力矩,且滿足
(4)
將式(4)代入式(2)得:
(5)
對式(3)、式(5)進行拉氏變換得:
(6)
由式(6)推導出船舶線性橫搖運動系統狀態方程和輸出方程如下:
(7)
(8)
式中:x1,x2為狀態變量;輸入信號為μ=aθe(t);輸出信號為y=θ(t);且滿足
(9)
(10)
(11)
利用上述船舶橫搖模型,將海浪仿真輸出aθe(t)作為輸入,求解上述狀態方程和輸出方程,便可得到船舶的橫搖信號。圖4是馬潔等[1]根據上述船舶橫搖模型計算得到的5級海況下小船以航速18kn航行時不同遭遇角下的橫搖運動仿真曲線。
從馬潔等[1]的分析成果看出,高海況下橫搖引起的橫搖力矩常常滿足一定的正弦特性[1~2]。船舶排水量越大,搖擺周期越長,擺幅減小,船舶搖擺的周期性和船舶的排水量有關[1],船舶搖擺周期的統計數值如表1所示。
圖4 5級海況航速18kn下的橫搖運動仿真曲線
排水量/tTθ/s500~10006~91000~50009~135000~1000013~1510000~3000016~2030000~5000020~283
2.2線列陣正弦隨機擾動模型
高海況下船舶周期性的橫向擺動引起纜索拖曳端點(連接器)周期性橫搖。當纜索拖曳端點(連接器)偏離船舶中心越遠,纜索拖曳端點(連接器)受到船舶橫搖的影響越明顯,通常情況下纜索拖曳端點(連接器)總是偏離船舶中心,所以纜索周期性擺動不可避免。周期性橫搖擺動以應力波[3]的形式通過纜索介質傳播到線列陣,又引起線列陣陣形發生正弦隨機擾動。
假設船體拖著線列陣行駛的方向為X軸方向,以陣形還沒變形時線列陣末端所在位置為圓心O,線列陣擾動的方向記為Y軸,同時假設拖纜中的聲學模塊是嚴格不可伸縮的,d為線列陣理想情況下的陣元間距,N為陣元個數。其正弦擾動模型如圖5所示,隨機擾動下第i(i=1,…,N)個陣元的坐標位置可表示:
yi=Asin(2πfxi+φ0)
(12)
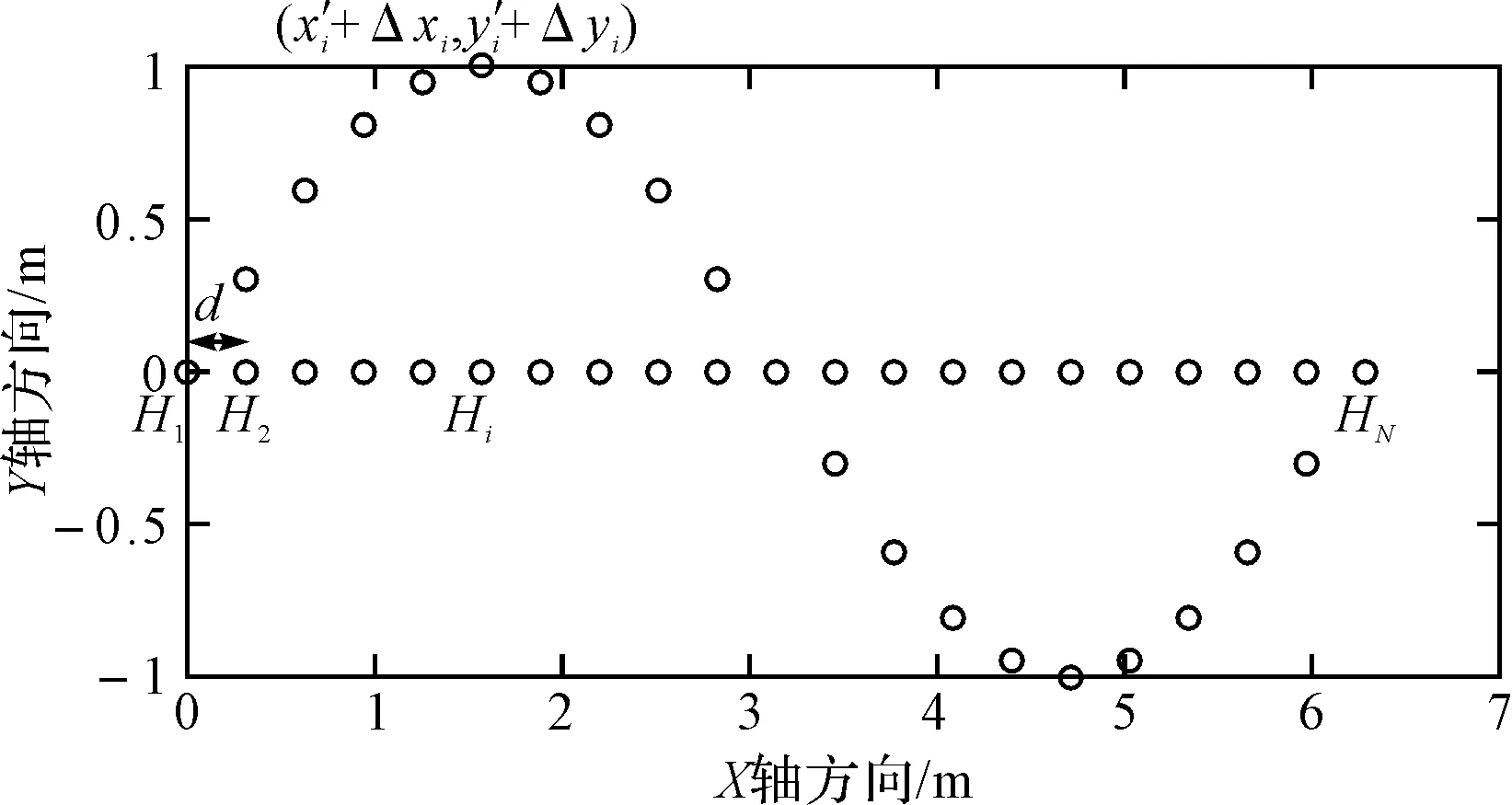
圖5 陣形正弦隨機擾動
很明顯,式(10)中第i個陣元的橫坐標xi滿足橢圓積分:
(13)
令
(14)
將其轉化為標準的橢圓積分形式:
(15)
其中
(16)
且滿足:
E(X,A,f)=(i-1)d(i=1,…,N)
(17)
式(15)~式(17)聯立,推導出:
(18)
普通橢圓函數表只在0~π/2內給值。而按式(18)反函數時,顯然有可能使自變量值大大超出π/2之外。所以具體計算時還要作適當變換[3],這里不再細述。
3 求解正弦隨機擾動的遞推方法
根據橢圓函數的反函數可以有效求解基陣正弦隨機擾動的陣元坐標,但是應用橢圓函數計算比較復雜。下面給出一種遞推的方法,用弧的微分公式逐個求解陣元坐標(xi,yi)。
用ds來表示弧的微分,ds是常量,ds和dx滿足:
(19)
把上式微分改寫為差分,即ds=Δs,dx=Δx,推導出第i個基元橫坐標的公式為
(20)
由式(20)遞推求得第i個陣元的橫坐標xi后,由yi=Asin(2πfxi+φ0)求出縱坐標,便可以很方便地求解各個陣元的的坐標(xi,yi)。
相關理論證明,當Δs取得足夠小時,由式(20)求出來的(xi,yi)和由求解橢圓函數的反函數結果完全一致[5]。
4 陣元信號特性分析
高海況下拖曳線列陣陣形擾動引起各個陣元空間位置的變動,陣元空間位置的變動引起陣元信號特性的變化,陣元信號特性的變化主要表現為陣形擾動前后陣元信號傳播時延的變化。本節利用上訴正弦隨機擾動模型的成果,主要分析了各路陣元信號傳播時延的變化并對陣元信號進行仿真。
(21)
另外,正弦擾動下各個陣元的空間坐標(xi,yi)利用遞推方法求解。
當水聲目標輻射噪聲信號以球面波向外傳播時,陣形擾動前后第i號陣元的傳播時延變化量Δdelayi滿足:
(22)
如果在聲納信號處理之前,預先通過建模的方法計算出各個陣元的時延變化量Δdelayi,便能給后續的波束形成等聲納信號處理技術[6~8]提供一定的參考,做到陣形畸變下線列陣功率譜等的校正。
圖6所示是仿真的水聲目標以30m/s的速度沿角度60°的方向勻速向外運動過程中拖曳線列陣正弦擾動前后端點基元接收到的陣元信號的時域圖。其中,拖曳線列陣陣元個數為50,正常工作時陣元間距為1m,那么,端點基元在擾動前后的坐標分別為(49,0)和(48.25,-1.8107)。此外,水聲目標輻射噪聲信號的頻率f為50Hz,陣元信號的時延通過內插FIR濾波器[9]實現,從水聲目標位置到達各個陣元的水聲傳播信道[10~16]應用基于BELLHOP的射線模型。
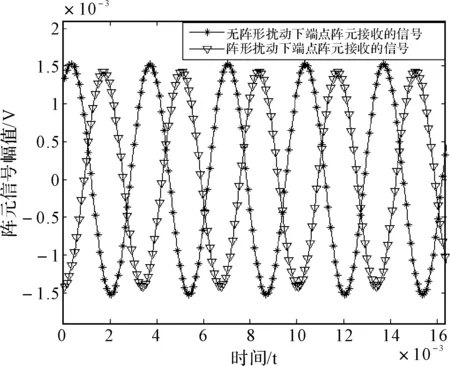
圖6 線列陣端點在陣形擾動前后陣元信號時域圖
從圖中可以明顯看出陣形擾動前后陣元信號的傳播時延發生變化。由于擾動前后陣元的空間坐標發生偏移,正弦隨機擾動下陣元和水聲目標位置的距離變大,水聲目標位置到達陣元端的水聲傳播信道的傳播損失變大,對應的端點陣元信號的幅度衰減更大。
5 結語
本文詳細分析了高海況隨機海浪作用下船舶的線性橫搖運動,結合應力波傳播的特點,建立了拖曳式線列陣正弦隨機擾動模型,對線列陣陣元坐標進行推導,并分析研究陣形擾動下陣元接收信號的特性,為陣形擾動影響下波束形成和線列陣功率譜的校正等打下基礎。
參 考 文 獻
[1] 馬潔,韓蘊韜,李國斌.不同航態下船舶運動規律仿真研究[J].艦船科學技術,2006,28(1):32-36.
[2] 唐慧妍.船舶橫向運動受擾估計、建模及LQG控制研究[D].哈爾濱:哈爾濱工程大學,2007.
[3] 張素俠.深海系泊系統松弛-張緊過程纜繩的沖擊張力研究[D].天津:天津大學博士學位論文,2008.
[4] 單鐵兵.波浪爬升的機理性探索和半潛式平臺氣隙響應的關鍵特性研究[D].上海:上海交通大學博士學位論文,2013.
[5] 李啟虎.論陣形畸變的拖曳式線列陣的工作方式的選取問題[J].聲學學報,1991,16(1):31-36.
[6] 李洪濤.自適應數字波束形成關鍵技術研究[D].南京:南京理工大學博士學位論文,2012.
[7] 郭元曦.水聲陣列信號處理的并行實現研究[D].哈爾濱:哈爾濱工程大學博士學位論文,2008.
[8] 鄢社鋒,馬遠良.基于二階規劃的任意傳感器陣列時域恒定波束形成[J].聲學學報,2005,30(4):310-316.
[9] 劉在爽,楊抒文,王勁濤,等.內插FIR數字濾波器的多相實現[J].電視技術,2009,33(1):52-557.
[10] Porter M B, Bucker H P. Gaussian beam tracing for computing oce- an acoustic fields[J]. J AcoustSoc America,1987,82(4):1349-1359.
[11] Y. Tao, X. Xu. Simulation Study of Multi-path Characteristics of Acoustic Propagation in Shallow Water Wireless Channel[C]//2007 International Conference on Wireless Communications, Networking and Mobile Computing. Shanghai, China,2007,27(5):1068-1070.
[12] A. Das, A. Kumar, R. Bahl. Study of Feature Discrimination Effects Due to Time Varying Channel for Passive Sonar[J]. OCEANS 2005. Washington, DC, United states,2005,13(4):1-8.
[13] S. Tang, L. Da, J. Xie. Underwater Broadband Signal Waveform Fast Prediction Method in Shallow Water with a Thermocline[C]//3rd International Conference on Measuring Technology and Mechatronics Automation. Shanghai, China,2011,23(2):1072-1075.
[14] Milica Stojanovic, James Preisig. Underwater Acoustic Communication Channels: Propagation Models and Statistical Characterization[J]. IEEE Communications Magazine,2009,47(1):84- 89.
[15] Henry S. Dol, Mathieu E. G. D. Colin, Michael A. Ainslie Simulation of an Underwater Acoustic Communication Channel Characterized by Wind-Generated Surface Waves and Bubbles[J]. IEEE Journal of Oceanic Engineering,2013,38(4):642-654.
[16] P. A. van Walree, T. Jenserud, M. Smedsrud. A discrete-time channel simulator driven by measured scattering functions[J]. IEEE J. Sel. Areas Commun,2008,26(9):1628-1637.
*收稿日期:2015年10月13日,修回日期:2015年11月24日
作者簡介:徐雅南,男,碩士研究生,研究方向:水下信號處理。
中圖分類號TP391
DOI:10.3969/j.issn.1672-9730.2016.04.039
Array Shape Distortion and Array Signal Characteristics of A Towed Array under Harsh Sea Conditions
XU Yanan
(Hangzhou Applied Acoustic Research Institute,Hangzhou310012)
AbstractTo further improve towed linear array’s performance underwater, the movement of tugs under harsh sea conditions is analyzed and the sine random distortion model of towed line array is proposed. ITTC single-parameter standard wave spectrum is applied to modeling ship’s linear rolling movments under stochastic waves. Then, the sine random distortion pattern is established based on stress wave theory, and array signal characteristics are analyzed. Both of these make a basis for beamforming and power spectrum correction of the towed line array with shape distortion.
Key Wordsrolling movements, sine random distortion, time delay, array signal characteristics