慣性輔助GNSS跟蹤環路技術研究*
2016-08-10 10:36:17丁海龍
航天控制 2016年1期
陸 帥 陳 帥 余 威 方 俊 丁海龍
南京理工大學自動化學院,南京 210094
?
慣性輔助GNSS跟蹤環路技術研究*
陸 帥 陳 帥 余 威 方 俊 丁海龍
南京理工大學自動化學院,南京 210094

GNSS信號在載體高動態飛行時會產生較大的多普勒頻移,常規的跟蹤環難以穩定跟蹤信號,可能會使信號失鎖。本文提出了一種利用慣性信息為跟蹤環路提供輔助多普勒頻移的方法,從而解決高動態環境下GNSS信號的穩定跟蹤問題。實驗結果表明:在載體以50g的加速度相對衛星運動時,該方法顯著降低了高動態對跟蹤環路的影響,使接收機動態跟蹤性能明顯提升。 關鍵詞 高動態;慣性輔助;跟蹤環路;多普勒頻移
GNSS在工業、交通和軍事等眾多領域發揮著巨大的價值,但是其導航性能在高動態環境下易受影響[1]。在高動態環境下,GNSS接收機的跟蹤環路容易失鎖,使接收機無法及時提供精確的導航信息[2]。因此可以用載體的慣性信息來輔助GNSS接收機的跟蹤環路,達到提高接收機動態性能的目的。
本文采用多普勒頻移預測算法,利用慣性信息對多普勒頻移進行預測,將結果應用于慣性輔助跟蹤環路,降低高動態對跟蹤環路的動態應力作用。實驗結果表明,慣性輔助跟蹤環路可以提高跟蹤環路的動態性能,適用于導彈、火箭彈等高機動武器。
1 載波環跟蹤誤差分析
GNSS載波鎖相環的相位測量誤差源包括相位抖動和動態應力誤差,造成相位抖動的誤差源主要分為熱噪聲、機械顫動所引起的震蕩頻率抖動以及艾蘭均方差三種[3]。
熱噪聲均方差σtPLL的估算公式為
(1)
式中,BL為環路噪聲帶寬,C/N0為信號載噪比,Tcoh為相干積分時間。上式表明熱噪聲與環路階數無關。
載體運動和接收裝置的機械顫動會引起接收機基準振蕩頻率的抖動,相應的相位抖動均方差σv約為2°。
艾蘭型晶體震蕩頻率漂移隨著時間的積累會引入相位抖動噪聲,其均方差σA與衡量頻率穩定度的艾蘭均方差σA(τ)和相干積分時間Tcoh的乘積成正比,即
(2)
式中,c為光速,λ1為信號波長。
若將造成相位抖動的以上三部分誤差源綜合起來,則總的相位抖動均方差σi可估算成
(3)
N階鎖相環的穩態跟蹤誤差θe可統一表達成如下形式:
(4)

考慮到暫態響應過程中出現的震蕩,鎖相環所產生的最大動態應力誤差可能遠遠大于其穩態誤差值。對鎖相環跟蹤門限采用一種保守估計方法:3倍的相位測量誤差均方差不得超過四分之一的鑒相牽入范圍,即
3σPLL=3σi+θe≤45°
(5)
利用載體的慣性信息、星歷信息等進行頻率預測,輔助跟蹤環路,能有效的降低動態因素帶來的動態應力誤差θe。理論上,引入慣性信息輔助后的相位測量誤差為
(6)
式中,σdopp為多普勒預測頻移誤差帶來的跟蹤相位誤差。
2 頻率預測算法

(7)
(8)
式(7)和(8)中T為相干積分時間。

(9)
GNSS接收機接收到的信號頻率偏移可以表示為[4]
Δfcarrier=fdopp+Δfrec+Δfs
(10)
式中,fdopp為衛星與載體相對運動造成的多普勒頻移;Δfrec為接收機時鐘頻漂造成的頻率誤差;Δfs為衛星時鐘頻漂帶來的頻率誤差,衛星時鐘頻率漂移比較小,一般忽略不計。可見在高動態環境下,fdopp成為影響跟蹤環路的主要因素。
利用式(9)可以得出下一時刻接收機i通道可見衛星的多普勒頻移為
(11)
(12)

3 慣性輔助載波跟蹤環路設計方案
慣性輔助載波跟蹤環拉氏變換框圖如圖1所示[4-11]。
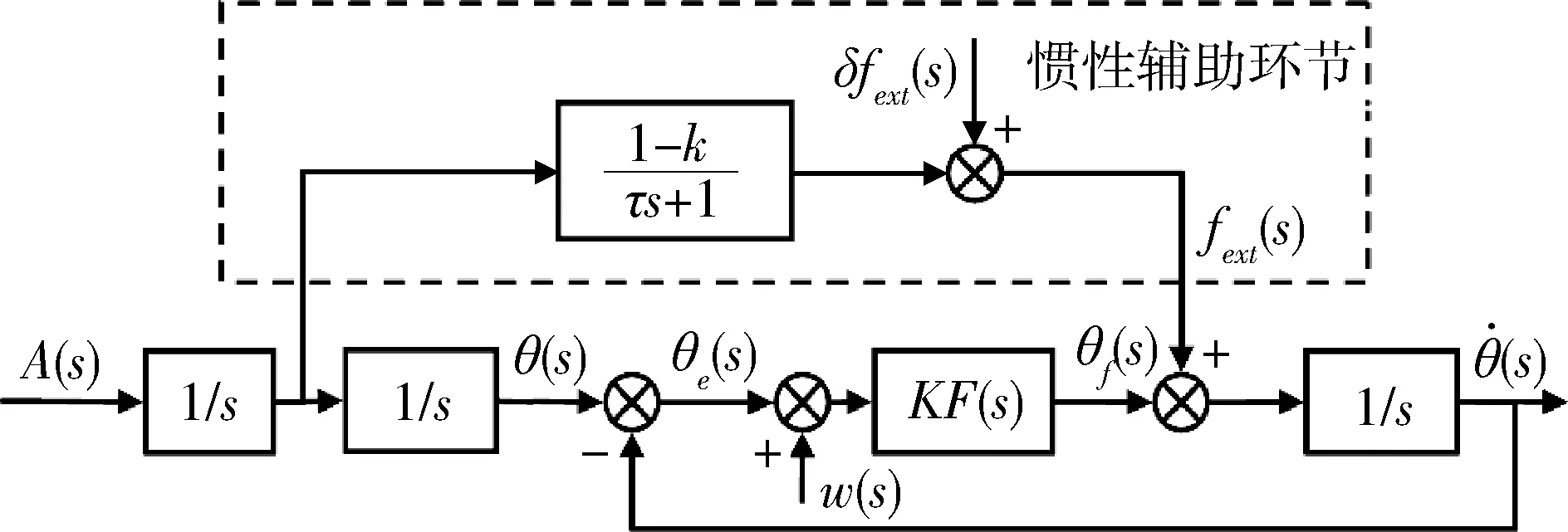
圖1 慣性輔助載波跟蹤環拉氏變換框圖
(13)
(14)

(15)
當采用慣性輔助載波跟蹤環路時,(1-k)/(τs+1)表示慣性輔助信息的不完善(其中,k為標度系數誤差,τ為滯后時間常數),δfext(s)表示由傳感器的標定誤差、鐘頻等因素引起的頻率估計誤差,從圖1可得慣性輔助載波跟蹤環傳遞函數為

(16)
(17)
(18)
式(18)表明當慣性輔助信息為理想情況時,即τ=0,k=0時,穩態誤差Es_aid=0。
4 高動態仿真實驗
4.1 實驗系統
本實驗采用衛星信號導航模擬器模擬某載體高動態運動軌跡,其三維曲線如圖2所示。
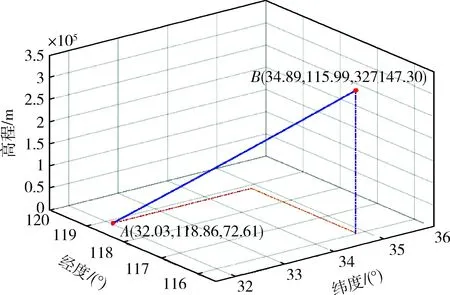
圖2 載體高動態運動軌跡
圖2中,點A為運動起始點:北緯: 32.0261° 、東經: 118.8578°、高程: 72.6111m;點B為終止點:北緯: 34.8931°、東經: 115.9913°、高程: 327147.3041m。飛行器初始以34.6410m/s勻速飛行4min,接著以51.9615g的加速度勻加速直線飛行30s,再以51.9615g的加速度勻減速直線飛行30s,最后勻速飛行至終點,整個飛行過程耗時480s。仿真實驗如圖3所示。
4.2 導航性能分析
本實驗采用2種方案。方案1:接收機首先采用常規跟蹤環路,載波環取2階FLL (Frequency Locked Loop)輔助3階PLL (Phase Locked Loop),碼環取2階DLL (Delay Lock Loop);方案2:在方案1的基礎上采用慣性輔助跟蹤環路,基于慣性信息預測下一時刻載波信號頻率偏移,最后對比2種算法的導航性能。
圖3為接收機采用常規跟蹤環路時在高動態條件下的導航結果。結果表明,采用常規跟蹤環路的接收機在高動態條件下信號容易失鎖,無法連續穩定導航。
圖4為接收機采用慣性輔助跟蹤環路時的導航結果。結果表明:接收機采用慣性輔助跟蹤環路時,在高動態條件下始終穩定鎖定衛星信號,連續穩定地輸出導航信息。
圖3 常規跟蹤環路導航結果
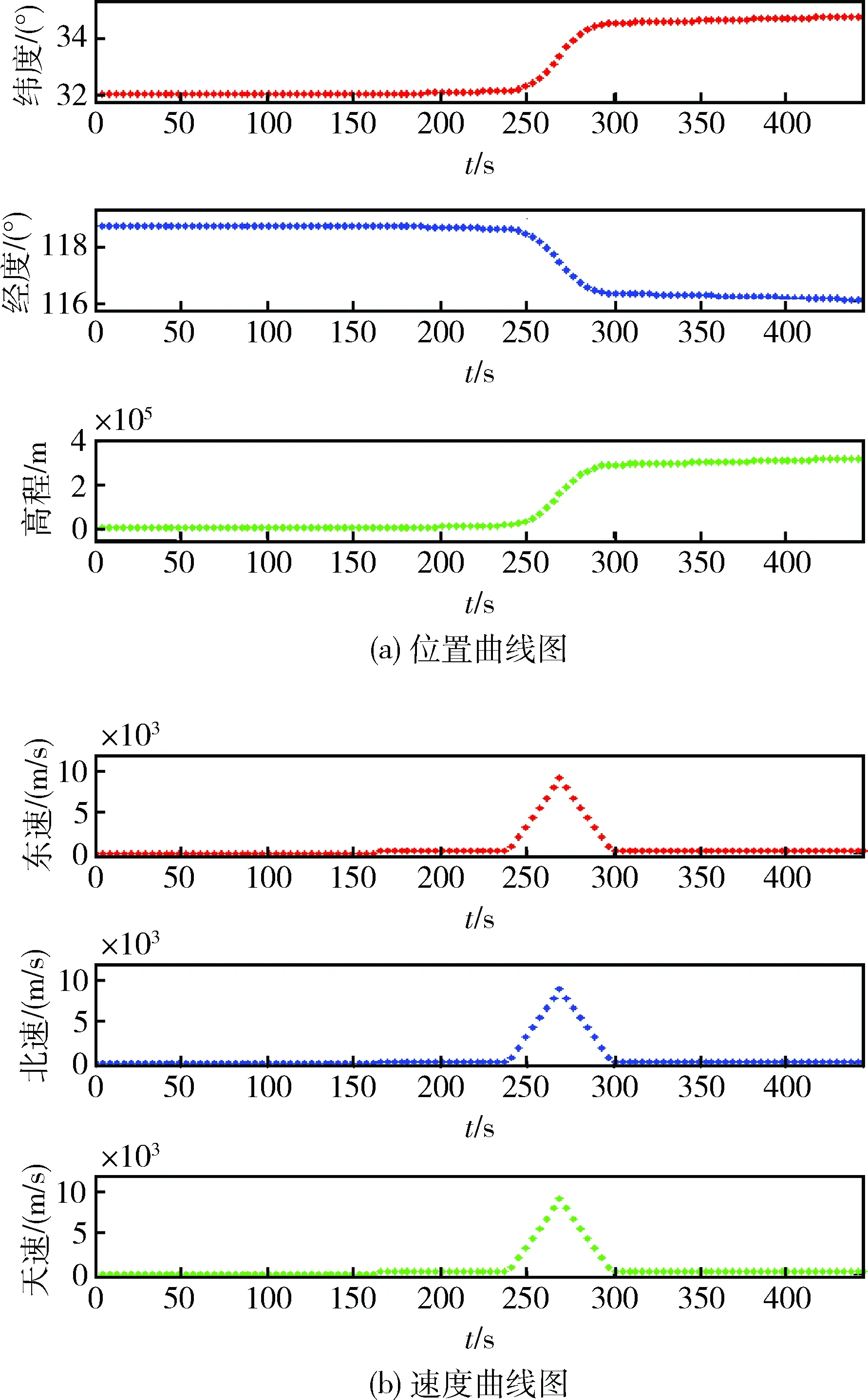
圖4 慣性輔助跟蹤環路導航結果
圖5為接收機采用慣性輔助跟蹤環路時的導航誤差。結果表明:接收機采用慣性輔助跟蹤環路時,在高動態條件下連續穩定導航時水平位置誤差≤5m,垂直位置誤差≤20m,速度誤差≤0.5m/s。
圖6為接收機采用慣性輔助跟蹤環路時第11和26號衛星信號多普勒頻移信息。結果表明:在高動態條件下跟蹤環路中多普勒頻移預測誤差≤10Hz。
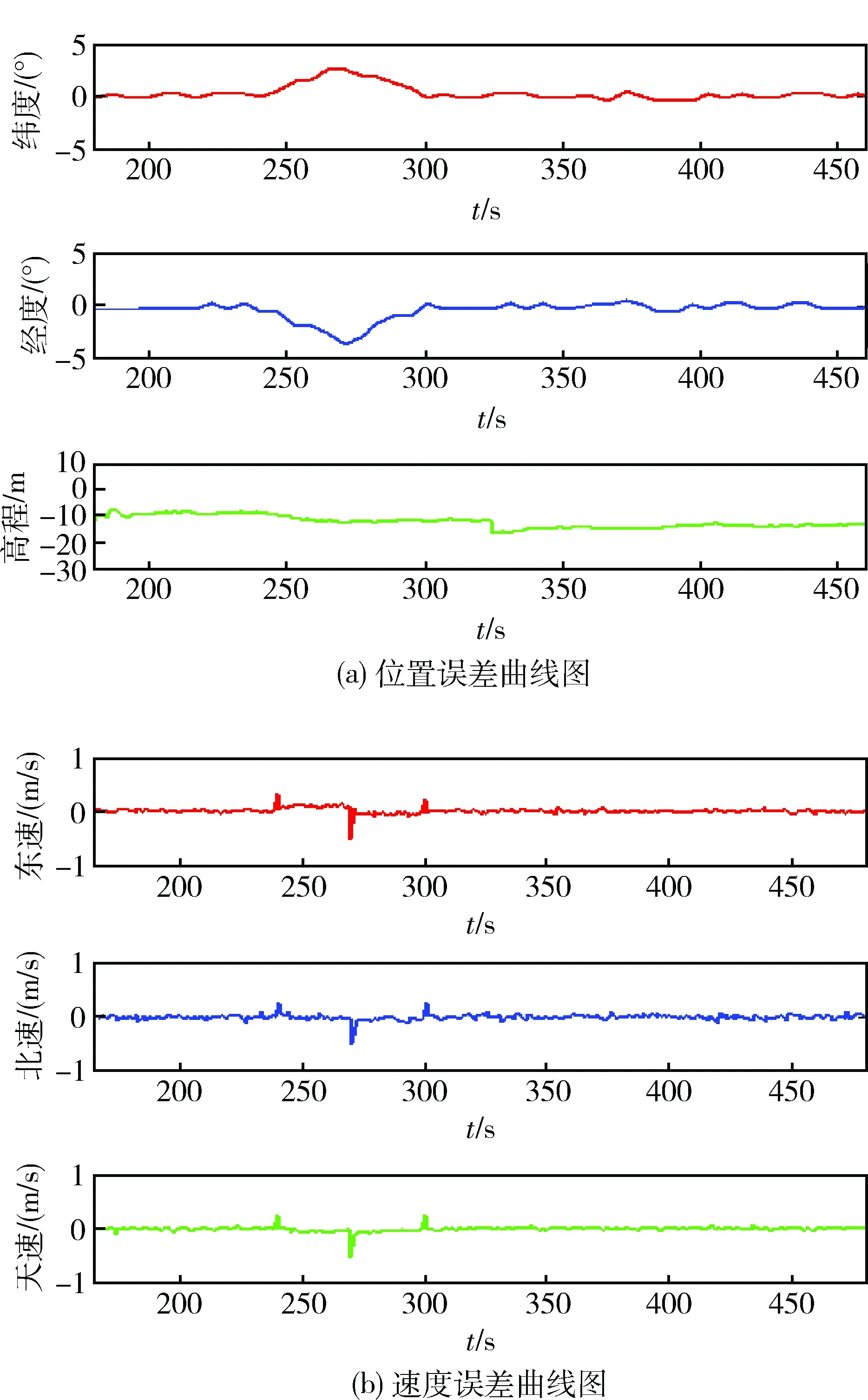
圖5 慣性輔助跟蹤環路導航誤差
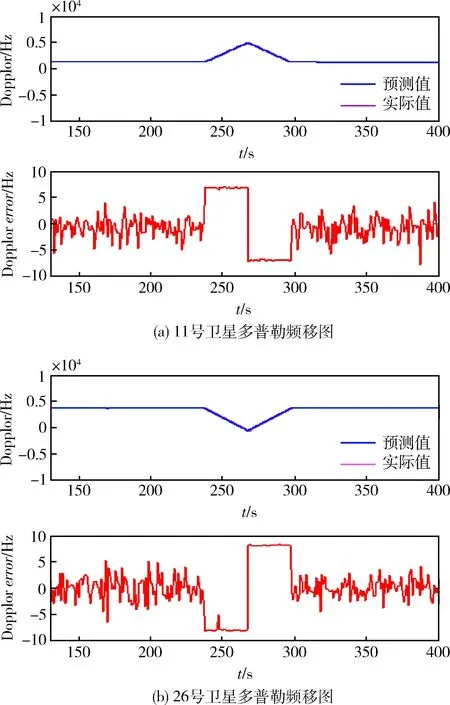
圖6 慣性輔助跟蹤環路多普勒頻移誤差
5 結束語
基于慣性輔助GNSS跟蹤環路的分析、設計與實現,驗證了該方法在高動態環境下的可行性,分析了該方法在高動態環境下的導航性能,為GNSS/INS超緊組合的進一步理論研究奠定了基礎。
[1] 劉建業,曾慶華,等.導航系統理論與應用[M].西安: 西北工業大學出版社,2010.(Liu Jianye,Zeng Qinghua. Theory and Application of Navigation System [M].Xi'an: Press of Northwest Industrial University,2010.)
[2] 唐康華.GPS/MIMU嵌入式組合導航關鍵技術[D].長沙: 國防科學技術大學,2008.(Tang Kanghua. Research on the Key Technology of Embedded GPS/MIMU Integrated Navigation [D]. Changsha: National University of Defense Technology, 2008.)
[3] 謝剛.GPS原理與接收機設計[M].北京: 電子工業出版社,2009.(Xie Gang. GPS Principle and the Design of Receiver [M]. Beijing: Publishing House of Electronics Industry,2009. )
[4] 胡銳.慣性輔助GPS深組合導航系統研究與實現[D].南京: 南京理工大學,2010.(Hu Rui. Research and Realization of SINS-Aided GPS Deeply Integrated Navigation System [D]. Nanjing: Nanjing University of Science and Technology,2010.)
[5] 袁俊剛.GPS慣性緊組合導航系統研究[D].南京: 南京航空航天大學,2011.(Yuan Jungang. The Study of Tightly GPS/INS Integrated Navigation System [D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2011.)
[6] 李磊.GPS/SINS深度組合導航系統研究[D].上海:上海交通大學,2009.(Li Lei. Research on the Deep Integrated of GPS/SINS Navigation System [D].Shanghai: Shanghai Jiao Tong University, 2009.)
[7] 黃汛, 高啟孝, 李安, 陳永冰, 葛德宏.INS/GPS超緊耦合技術研究現狀及展望[J].控制與制導,2009,4(1):42-47. (Huang Xun, Gao Qixiao, Li An, Chen Yongbing, GE Dehong. Research Situation and Prospect of INS/GPS Ultra-tightly Integrated Technology [J]. Winged Missiles Journal,2009, 4(1):42-47.)
[8] 周坤芳. 深緊耦合GPS/INS組合模式及其特性研究[J].現代導航,2012,4(1):243-246.(Zhou Kunfang. Research on Characteristics and Integrated Mode of Tightly-Coupled GPS/INS [J]. Modern Navigation,2012, 4(1):243-246.)
[9] 王朋輝.高動態GPS/INS組合導航系統研究[D].南京: 南京航空航天大學,2010.(Wang Penghui. The Study of High Dynamic GPS/INS Integrated Navigation System [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010.)
[10] 艾倫, 金玲, 黃曉瑞.GPS/INS組合導航技術的綜述與展望[J].數字通信世界,2011,2(1):58-61. (Ai Lun, Jin Ling, Huang Xiaorui. Summary and Prospect of GPS/INS Integrated Navigation System [J]. Digital Communication World, 2011, 2(1):58-61.)
[11] 張康,李連仲,顏安.高動態慣性+衛星深耦合組合導航技術研究[C].第四屆中國衛星導航學術年會電子文集,2013.(Zhang Kang, Li Lianzhong, Yan An. Research on High Dynamic Deeply Integrated INS+GNSS Navigation Technology [C]. The Fourth Session of China Satellite Navigation Conference, 2013.)
Research on Inertial Navigation Assistance to GNSS Tracking Loop
Lu Shuai, Chen Shuai, Yu Wei, Fang Jun, Ding Hailong
Nanjing University of Science and Technology, Nanjing 210094, China
GNSSsignalcangenerateDopplershiftinhighdynamicflight.Thecommontrackingloopcannottrackthesignalsteadilyandpossiblylosetolocksignal.AmethodbyprovidingassistedDopplershiftforthetrackingloopwithinertiainformationisproposedinthispapersoastorealizestablytrackingthesignalofGNSSinhighdynamicenvironment.Theexperimentaldatashowsthatthemethodcanovercometheinfluenceofdynamicstresssignificantlyandmeetthenavigationrequirementofcarrier50gaccelerationrelativetothesatellite.
Highdynamic;Inertialinformationaided;Trackingloop; Dopplershift
*國家自然科學基金委員會和中國工程物理研究院聯合基金資助(U1330133);江蘇省自然科學基金(BK201307);國家級大學生科研訓練項目(201410288007)
2015-05-19
陸 帥(1993-),男,江蘇徐州人,本科生,主要研究方向為組合導航技術;陳 帥(1980-),男,江蘇南通人,博士,副教授,主要研究方向為導航、制導與控制;余 威(1993-),男,安徽黃山人,碩士研究生,主要研究方向為組合導航技術;方 俊(1996-),男,安徽蕪湖人,本科生,主要研究方向為組合導航技術;丁海龍(1994-),男,安徽安慶人,本科生,主要研究方向為組合導航技術 。
V249.32
A
1006-3242(2016)01-0020-05