基于基站的高速公路車輛定位技術*
2016-08-10 03:42:59劉建華孫江輝
計算機與數字工程 2016年7期
李 林 劉建華 杜 程 馬 龍 孫江輝
(1.西安郵電大學信息中心 西安 710061)(2.西安郵電大學計算機學院 西安 710061)(3.西安郵電大學通信與信息工程學院 西安 710061)
?
基于基站的高速公路車輛定位技術*
李林1劉建華1杜程2馬龍2孫江輝3
(1.西安郵電大學信息中心西安710061)(2.西安郵電大學計算機學院西安710061)(3.西安郵電大學通信與信息工程學院西安710061)
摘要通過對基站定位技術的綜合研究,旨在將基站定位技術應用于高速公路車輛位置服務中。通過高速公路上車輛行駛經過連續不同的基站,提出一種針對高速公路車輛位置定位的算法,能夠有效地推算出車輛的行駛方向軌跡,結合單基站所覆蓋范圍與高速公路形成的幾何圖形,利用幾何關系綜合分析出高速公路上車輛的行駛方向及位置。
關鍵詞基站; 車輛定位; 位置服務; AOA; TOA; 隱馬爾科夫模型
Class NumberTP393
1引言
隨著帶有位置服務的應用層出不窮,位置服務已經成為移動增值業務的重要組成部分,在移動通信領域具有廣泛的應用前景。基站作為移動通信網絡不可缺少的網元,是移動網絡重要的基礎設施,鐵塔公司的成立也將進一步推動基站的統一管理、開放化、共享化。基站不僅為位置服務提供信息傳輸通道,而且能夠利用其實現位置定位功能,利用基站提供位置服務已經成為研究和應用熱點[1~6]。
隨著智能交通系統的發展,高精度、高可靠的車輛位置信息是實現車輛定位導航的基本條件,也是客流疏導、交通智能調度、機動車自動控制等等用途的重要基礎[7]。盡管基于衛星定位系統使用廣泛,但是由于易受障礙物的影響,延遲大等問題越來越不能滿足高精度的位置定位要求[8]。其它使用紅外線、聲波、磁場等形式發送定位信號,實現高精度的無線定位的無線定位技術需要安裝額外的信號發射裝置,增加了復雜性和實現成本[9~10]。而綜合采用基于基站的定位技術,并結合移動通信網絡基礎設施支撐的位置業務服務,不僅可以實現對高速公路車輛的精確定位,而且具有低時延、高精度、實現簡單、低成本和高可靠性等優勢,從而滿足智能交通系統中車輛的定位要求。
2基站定位技術
基站作為移動通信網絡不可缺少的網元,是移動終端與移動網絡之間交互的重要組成部分。隨著移動通信網絡的迅速發展,更多的移動終端接入到移動通信網絡中,越來越多的基站被建立起來,幾乎遍布世界的每一個角落,為終端用戶提供通信服務。所以移動通信網絡中最基本的定位技術就是基于基站的定位技術[11]。
根據確定移動終端位置所用基站的多少可以將現有的基站定位技術劃分為以下幾類[12~17]:
1) 單基站定位技術
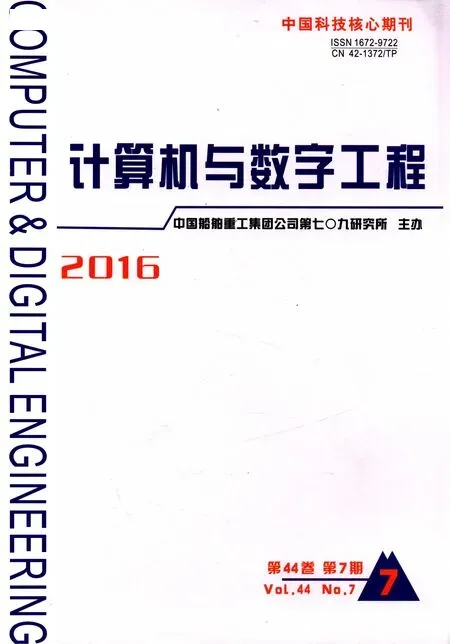
基站是以移動蜂窩網絡的網格為單位所建立的,所以在單個蜂窩網絡中就會有一個跟它相對應的基站,而每個基站都有它所對應小區的ID號碼,所以只需要得到移動終端當前所在小區的ID號碼就可以得到其位置信息。基于CELL ID的定位技術如圖1所示。
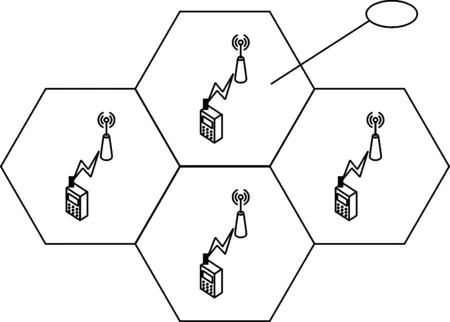
圖1 基于CELL ID的定位技術
這種單基站定位的精度跟隨小區的大小在變化。但這種定位技術對移動終端沒有任何特別的要求,也不用對移動蜂窩網絡做任何修改,實現比較簡單,而且定位速度快。因此,這種基于CELL ID的定位技術在移動網絡的定位業務系統中應用廣泛。
2) 多基站定位技術
多基站定位技術主要包括時間提前量(TA,Time Advance)、信號到達角度定位技術(AOA,Angle of Arrival)、信號到達時間定位技術(TOA,Time of Arrival)、信號到達時間差定位技術(Time Different of Arrival,TDOA)、增強觀測時差定位技術(Enhanced Observed Time Different,EOTD)、信號強度定位(Signal Strength Base,SSB)和多徑指紋方法(Fingerprint)等。
下面主要分析幾種定位技術的具體原理。到達角度的定位技術AOA是利用兩個或者多個基站對測量移動終端發出的信號到達角度來計算移動終端的位置的,是移動終端與基站的兩條或者多條方位線交點的位置即為移動終端的測量位置,如圖2所示。
信號到達時間的定位技術TOA是利用移動終端獲得的三個附近的基站對其進行發送測量信號,再根據移動終端到這三個基站的到達時間,即所謂的導頻相位測量來確定移動終端的具體位置的。在測量的過程中,這三個基站必須與發送測量信號的移動終端確保時間是同步的,如圖3所示。
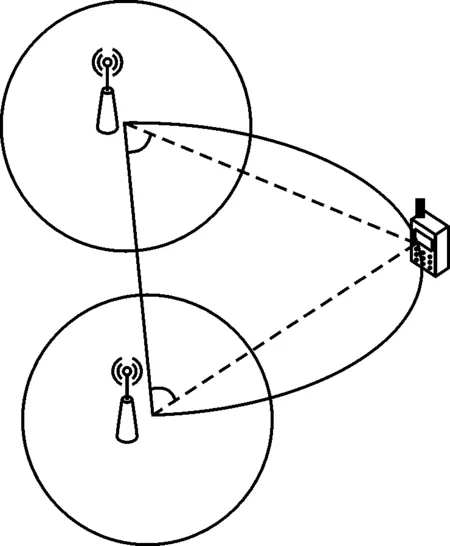
圖2 AOA定位技術
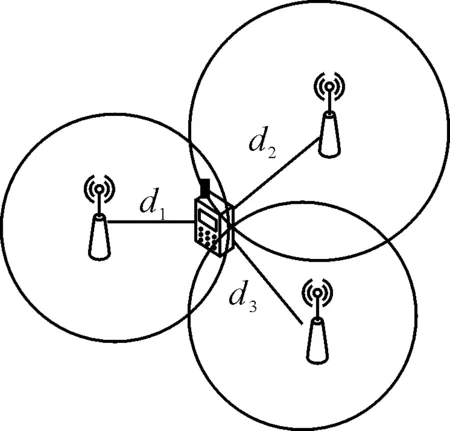
圖3 TOA定位技術
由于TOA定位技術必須確保移動終端與三個基站的時間是同步的,而且移動蜂窩網絡的系統如GSM和通用移動通信系統(Universal Mobile Telecommunication System,UMTS)TDD沒有設置時鐘同步的系統,所以提出了改進的TOA定位技術:信號到達時間差定位技術TDOA和增強觀測時差定位技術EOTD。
TDOA通過移動終端與基站之間的傳輸時間差來定位移動終端。假如測量所需的三個基站分別成為A基站、B基站和C基站,移動終端發射測量信號分別到這三個基站的時間分別為as、bs和cs,那么可以通過兩兩基站檢測信號的時間差來確定一條雙曲線,再根據這個雙曲線的交點就是移動終端的位置信息。
EOTD定位技術是利用三個基本量:
1) 觀察時間差OTD:移動終端觀察到的兩個不同位置基站信號的就收時間差;
2) 真實時間差RTD:兩個基站之間的系統時間差,由GSM網絡提供;
3) 地理位置時間差GTD:兩個基站到移動終端由于距離差而引起的傳輸時間差。
三個量關系是:OTD=RTD+GTD。
3高速公路車輛定位
3.1高速公路上車輛方向軌跡定位
根據高速公路上車輛的運行路線與基站覆蓋范圍的區域,提出了一種新的基站定位方法。
在單基站定位中,可以根據車輛當前的基站ID來進行判斷車輛的位置,但是其測量精度隨著基站的覆蓋范圍所推測出來的車輛位置而變化。當知道車輛處于當前基站ID,如果能知道該車輛之前經過的基站ID,這樣就可以根據車輛出現基站的范圍大致判斷車輛的行動軌跡,提高了基站定位的精度,如圖4所示。

圖4 基站軌跡定位
可以看出車輛的行動軌跡可以通過幾個基站來進行定位模擬,然后根據車輛所處基站的ID以及車輛之前所處的基站ID來大致計算車輛的行動軌跡和方向,確定車輛行駛的路線和位置信息。
在基站軌跡定位中,車輛當前所處基站的情況下,車輛將來所處的基站是與過去所處的基站無關的,它具有馬爾科夫性。在馬爾科夫基礎上延伸的隱馬爾科夫模型作為一種常見的序列預存模型[19],由一個五元組表示為λ=(N,M,π,A,B),其中X表示模型中的狀態,N表示模型中狀態的數量,即X={x1,x2,…,xN},可以理解為“隱序列”;Y表示所有狀態可能存在的觀測序列,M表示觀測序列中觀測值的數量,即Y=(y1,y2,…,yM),可以理解為“明序列”;π表示該狀態空間的初始概率;A表示狀態轉移矩陣,即X中各個狀態之間的轉移概率矩陣;B表示觀測序列的概率矩陣,即在X的條件下Y中各個觀測序列的轉移概率矩陣。在已知λ=(π,A,B)和具體的觀測序列Y={y1,y2,…,yM},通過觀測序列確定該觀測序列后面的狀態序列X={x1,x2,…,xN},即隱馬爾科夫模型可以通過一個已知的“明序列”來推測一個未知的“隱序列”。在基站定位的模型中,基站的位置即為“明序列”,車輛的位置即為“隱序列”,可以根據觀測到的基站序列推測車輛的路段序列,如圖5所示,基站軌跡是灰色基站范圍內,能夠判斷車輛最大可能是沿著箭頭行走的。
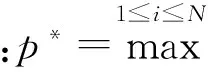
依據隱馬爾科夫鏈建立公路基站軌跡模型,如圖6所示,需要將高速公路抽象為若干個有向線段,車輛將來所處的路段只與當前路段有關,與過去的路段無關。
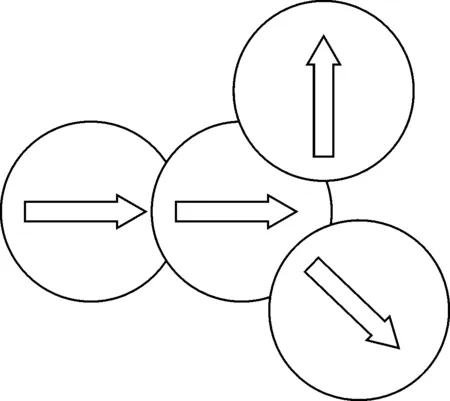
圖5 基于隱馬爾科夫鏈的基站軌跡定位
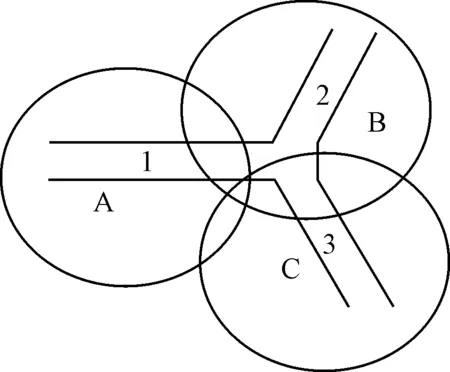
圖6 公路基站軌跡模型
在公路基站軌跡模型中有三個基站A、B、C分別覆蓋路段1、路段2和路段3,用X表示路段的序列,即X={x1,x2,x3},在基站覆蓋范圍內用這三個狀態xi表示這三條路段,用于描述車輛的真實位置信息;Y表示觀測到基站的系列,即Y={y1,y2,y3},共有三個基站A、B和C,是可以實時觀測到的序列;A表示從狀態xi到狀態xj的轉移概率,A=P(xj|xi)=aij,其中1≤i,j≤3,即各個路段之間的轉移概率;B表示處于狀態xi,觀測到Y序列的條件下的概率,即B=P(yi|xi)=bi(yi),其中1≤i≤3,路段從屬于基站的概率,可以根據路段處于該基站覆蓋區域的具體位置劃分,距離基站中心越近,從屬于該基站的概率就越大。依據觀測概率B、轉移概率A和觀測到的基站序列Y,求出最佳路段序列X。
設車輛在公路上的概率為初始狀態分布,經過T次觀測(yt1,yt2,…,ytT)可得到基站處于tT時刻的狀態xi,設t時刻處于狀態xi的最佳路徑概率為ψxi(t)(i=1,2,…,N)。在tT+1時刻觀測到的觀測序列為ytT+1,且狀態為xj的概率為
P(ytT+1|xtT+1=xj)=ψxi(t)×aij×bj(ytT+1)
(1)
所以在tT+1時刻,車輛處于狀態xj的最佳路徑的概率為
(2)
從tT時刻到tT+1時刻,車輛處于的最可能的狀態為
(3)
根據式(2)和式(3)進行Viterbi算法,可得到tT時刻到tT+1時刻車輛所處的最有可能方向軌跡。
3.2高速公路車輛位置定位
根據高速公路穿過當前基站的覆蓋范圍,形成如圖7所示幾何圖形,根據幾個關系,在基站覆蓋范圍內的一個圓上實現對車輛的定位。
通過測量移動臺與基站之間的距離,再結合公路與基站覆蓋范圍內所相交的弦以及車輛的行駛方向,即可確定移動臺的位置信息。設移動臺坐標(xi,yi)i=1,2,…,n,基站坐標(x,y),移動臺與基站之間的距離為Ri,即可得到方程式(4):
(x-xi)2+(y-yi)2=Ri2i=1,2,…,n
(4)
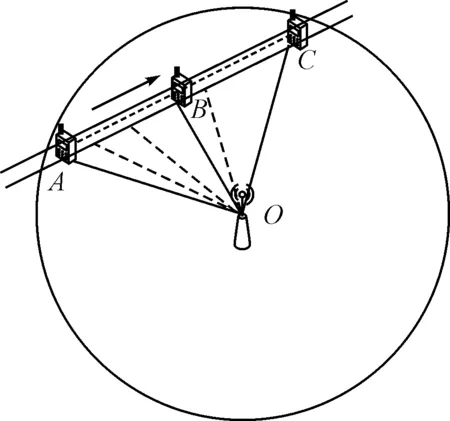
圖7 單個基站公路定位
通過測量電磁波在移動終端到基站之間的傳輸時間ti,1≤i≤n。根據公式可以計算出移動終端與基站之間的距離Ri,1≤i≤n。Ri=cti;其中c為電磁波在空中的傳播速度,即c=3×108m/s。
以車輛與基站之間的距離Ri為半徑所形成的圓和式(1)求得存在的兩個點,再根據車輛運行的矢量方向,確定移動終端的位置。
根據扇區定位技術的原理和基站軌跡定位技術以及高速公路上單個基站對車輛的位置分析,可以通過基站檢測高速公路的車輛行駛速度及位置,完成對高速公路上車輛的管理。
4實驗仿真
依據建立的公路基站軌跡模型,在公路上的三個路段有16個目標軌跡的樣點,如圖8所示,每個樣點處的觀測值如表1所示。
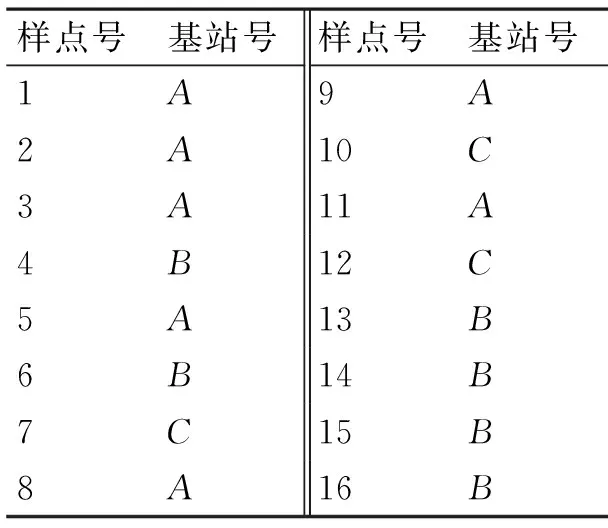
表1 觀測樣點數據

1) 輸入:初始化δ1(i)=πibi(Y1),φ1(i)=0,其中1≤i≤N;

求解后得到如圖9所示的樣點和表2所示的分類情況。
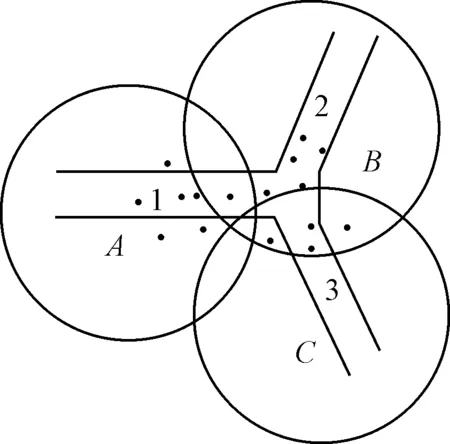
圖8 公路仿真樣點分布圖
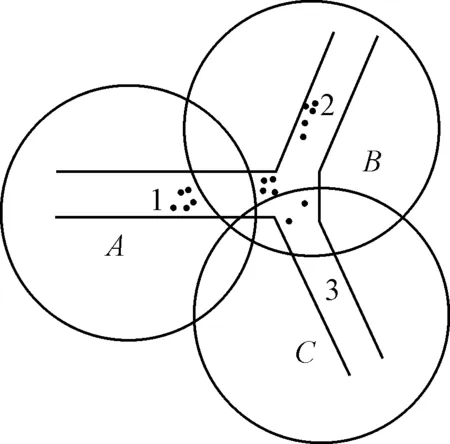
圖9 Viterbi算法譯碼后的樣點分布圖

路段號樣點號公路11,2,3,4,5公路26,8,9,11,12,13,14,15,16公路37,10
最終得到的車輛軌跡如圖10所示。
圖10 車輛軌跡圖
由此可以得出利用隱馬爾科夫模型能夠實現對車輛所處的基站范圍對其進行跟蹤,并隨著觀測點數的增多,軌跡定位的精度也會提高。
5結語
本文針對高速公路上車輛位置定位問題,結合了當前基于基站的定位技術,對行駛在高速公路上的車輛進行位置定位。首先根據車輛行駛過程經過的基站ID,進行隱馬爾科夫建模,再使用Viterbi算法推算出車輛行駛的方向軌跡。然后結合單基站所覆蓋范圍與高速公路所形成的幾何圖形,利用幾何關系進行對車輛位置的定位。最后根據仿真表明,該基于基站的車輛定位技術可以實現對高速公路上車輛的位置定位。
參 考 文 獻
[1] 陳志東.移動通信發展的現狀及未來趨勢研究[J].科技風,2011,21:30.
CHEN Zhidong. Research on the current situation and future trend of mobile communication[J]. Technology Wind,2011,21:30.
[2] 劉東明,吳偉,等.移動通信增值業務技術詳解[M].北京:人民郵出版社,2009.
LIU Dongming, WU Wei, et al. Mobile communication technology[M]. Beijing: People Post Press,2009.
[3] 楊恒,魏丫丫,李彬,等.定位技術[M].北京:電子工業出版社,2013:8-10.
YANG Heng, WEI Yaya, LI Bin, et al. Technology[M]. Beijing: Electronic Industry Press,2013:8-10.
[4] 張敏.位置服務:日益成為各類業務基石[J].通信世界,2012,3:14.
ZHANG Min. Location services: increasingly become the cornerstone of all kinds of business[J]. Communications World,2012,3:14.
[5] 羅枝花,王曉平.混合定位技術與應用的探討[J].數據通信,2011,4:8-11.
LUO Zhihua, WANG Xiaoping. Discussion on[J]. Luo branch, data communication technology and application of hybrid positioning,2011,4:8-11.
[6] 曹紅杰,陳應東,劉丹.位置服務理論、技術與實踐[M].北京:科學出版社,2015.
CAO Hongjie, CHEN Yingdong, LIU Dan. Location service theory, technology and practice[M]. Beijing: Science Press,2015.
[7] 蔣新華,陳宇,朱銓,等.交通物聯網的發展現狀與趨勢研究[J].計算機應用研究,2013,30(8):2256-2261.
JIANG Xinhua, CHEN Yu, ZHU Quan, et al. Research on the development status and trend of the Internet of things[J]. Computer Application Research,2013,30(8):2256-2261.
[8] Savasta S, Pini M, Marfia G. Preformance assessment of a commercial GPS receiver for network application[C]//5th IEEE Proc Cosumer Communications and Networking Conference,2008:613-617.
[9] 王國鋒,宋鵬飛,張蘊靈.智能交通系統發展與展望[J].公路,2012,5:217-222.
WANG Guofeng, SONG Pengfei, ZHANG Yunling. Development and Prospect of intelligent transportation system[J]. Highway,2012,5:217-222.
[10] 曹巖,雷濤.基于交通燈的高精度車輛定位技術[J].計算機工程與應用,2015,51(3):212-215.
CAO Yan, LEI Tao. High precision vehicle positioning technology based on traffic lights[J]. Computer Engineering and Application,2015,51(3):212-215.
[11] 趙鳴翔.蜂窩移動通信系統單基站定位技術研究[D].成都:西南交通大學,2009.ZHAO Mingxiang. Research on location technology of single base station in cellular mobile communication system[D]. Chengdu: Southwest Jiao Tong University,2009.
[12] 程敏.基于CDMA網絡的混合定位平臺研究[D].北京:北京郵電大學,2012.
CHENG Min. Research on hybrid positioning platform based on CDMA network[D]. Beijing: Beijing University of Posts and Telecommunications,2012.
[13] 陳濤.移動網HLR/HSS融合技術研究[D].北京:北京郵電大學,2013.
CHEN Tao. Study on HLR/HSS fusion technology of mobile network[D]. Beijing: Beijing University of Posts and Telecommunications,2013.
[14] 劉鷹.幾種定位技術的比較研究[J].應用科技,2005,32(9):34-36.LIU Ying. A comparative study on several positioning techniques[J]. Application Technology,2005,32(9):34-36.
[15] 孫巍,王行剛.移動定位技術綜述[J].電子技術應用,2003,(6):6-9.
SUN Wei, WANG Hanggang. Application of mobile positioning technology in[J]. Electronic Technology,2003,(6):6-9.
[16] 唐科萍,許方恒,沈才樑.基于位置服務的研究綜述[J].計算機應用研究,2012,29(12):4432-4436.
TANG Keping, XU Fangheng, SHEN Cailiang. A review of research on location based service[J]. Computer Application Research,2012,29(12):4432-4436.
[17] 曹巖,雷濤.基于交通燈的高精度車輛定位技術[J].計算機工程與應用,2015,51(3):212-215.
CAO Yan, LEI Tao. High precision vehicle positioning technology based on traffic lights[J]. Computer Engineering and Application,2015,51(3):212-215.
[18] 高小能,郭志飛.移動位置服務應用平臺研究與開發[J].微型機與應用,2011,3:61-63.
GAO Xiaoneng, GUO Zhifei. Research and development of mobile location service application platform[J]. Microcomputer and Application,2011,3:61-63.
[19] 何成剛.馬爾科夫模型預測方法的研究及其應用[D].合肥:安徽大學,2012.HE Chenggang. Markov model prediction method and its application[D]. Hefei: Anhui University,2012.
[20] Viterbi算法[EB/OL]. http://zh.wikipedia.org/wiki/%E7%BB%B4%E7%89%B9%E6%AF%94%E7%AE%97%E6%B3%95.
收稿日期:2016年1月4日,修回日期:2016年2月19日
作者簡介:李林,女,碩士,工程師,研究方向:計算機應用。劉建華,男,高級工程師,研究方向:網絡信息安全。杜程,男,碩士研究生,研究方向:網絡信息安全。馬龍,男,碩士研究生,研究方向:網絡信息安全。孫江輝,男,碩士研究生,研究方向:可信計算,網絡安全管理。
中圖分類號TP393
DOI:10.3969/j.issn.1672-9722.2016.07.014
Highway Vehicle Positioning Method Based on Base Station
LI Lin1LIU Jianhua1DU Cheng2MA Long2SUN Jianghui3
(1. Information Center, Xi’an University of Posts and Telecommunications, Xi’an710061)(2. School of Computer Science & Technology, Xi’an University of Posts and Telecommunications, Xi’an710061)(3. School of Communication and Information Engineering,Xi’an University of Posts and Telecommunications, Xi’an710061)
AbstractBased on the comprehensive study of the positioning method of the base station, the base station positioning technology is applied to the Services LBS (Location-Based). Through the vehicle running on the highway through a continuous different base station, the proposed algorithm for the location of highway vehicles can effectively calculate the direction of the trajectory. Combined with a single base station coverage and a highway geometry, the geometric relationship is used to comprehensively analyze the running direction and position of the vehicles on the expressway.
Key Wordsbase station, vehicle positioning, location-based service, AOA, TOA, HMM