一種快速自動增益控制方案的設(shè)計與實現(xiàn)*
2016-08-10 03:23:28王占友崔立林陳景兵
艦船電子工程 2016年7期
王占友 何 琳 崔立林 陳景兵
(海軍工程大學(xué)振動與噪聲研究所船舶振動噪聲重點實驗室 武漢 430033)
?
一種快速自動增益控制方案的設(shè)計與實現(xiàn)*
王占友何琳崔立林陳景兵
(海軍工程大學(xué)振動與噪聲研究所船舶振動噪聲重點實驗室武漢430033)
摘要模擬信號的采集及處理技術(shù)是一項應(yīng)用廣泛的技術(shù),但在一些特殊領(lǐng)域?qū)π盘柕牟杉纫筝^高,要求盡量將其幅值控制在合理范圍內(nèi),即小信號盡量放大而大信號盡量不削波,才能保證所采集的信號信噪比高且不失真,這是固定增益無法做到的。為此,論文提出了一種快速自動增益控制方案,利用模糊控制適用于非線性、不確定性系統(tǒng)的特點,同時設(shè)計了超限檢測功能,能夠?qū)π盘柾蛔儗?dǎo)致的超限及時反應(yīng),從而保證了論方案能夠?qū)崟r地根據(jù)信號強(qiáng)度快速改變增益,有效地解決了這一問題。實驗結(jié)果表明,論文提出的快速自動增益控制方案效果良好。
關(guān)鍵詞模擬信號采集; 自動增益; 模糊控制
Class NumberTP273
1引言
模擬信號的采集及處理技術(shù)應(yīng)用廣泛[1~3],但在一些特殊領(lǐng)域?qū)π盘柕牟杉纫筝^高,例如在故障診斷領(lǐng)域[4~6],信號采集的質(zhì)量將對結(jié)果產(chǎn)生直接影響。高質(zhì)量的信號有助于得出正確的結(jié)果,低質(zhì)量的信號往往會導(dǎo)致錯誤的結(jié)論。實際的物理信號變化范圍大且是隨機(jī)的。例如設(shè)備上的加速度傳感器,當(dāng)設(shè)備不工作時,其輸出信號幅值小,當(dāng)設(shè)備正常工作時,其輸出信號幅值會變大,當(dāng)設(shè)備突發(fā)故障時其輸出信號幅值會變得非常大,甚至超出檢測范圍。此種情況下,如果信號采集系統(tǒng)使用固定增益,勢必會顧此失彼。例如,如果只考慮信號的最大值不失真,勢必會采用最安全的通道增益進(jìn)行采集,這對于小信號而言信噪比不高,系統(tǒng)本身的噪聲對信號的影響會很大,影響分析結(jié)果;如果只為了提高信噪比,系統(tǒng)會使用較大的增益進(jìn)行數(shù)據(jù)采集,這對于大信號或者突然變大的信號而言,會造成削波,同樣會對分析結(jié)果造成較為嚴(yán)重的影響。為保證高精度采集數(shù)據(jù),系統(tǒng)要求當(dāng)信號較小時,使用較大的增益進(jìn)行采集,提高信噪比;當(dāng)信號突然變大或者一些大的瞬態(tài)噪聲出現(xiàn)時,系統(tǒng)會快速將增益切換到合理范圍,保證信號的完整性。因此,設(shè)計一種快速自動增益方案勢在必行。為此,本文利用模糊控制適用于非線性、不確定性系統(tǒng)的特點[7~12]設(shè)計了一種快速自動增益控制方案,并設(shè)計了超限檢測功能,能夠?qū)崟r檢測信號超限,較好地解決了這一問題。
2自動增益方案設(shè)計
自動增益方案的原理如圖1所示,該方案包括信號調(diào)理模塊、模數(shù)轉(zhuǎn)換模塊、峰值計算模塊、超限檢測模塊、模糊推理模塊、增益調(diào)整模塊及輸出模塊。信號調(diào)理模塊是嵌入到前向通道中的模塊,該模塊通過配置程控增益放大器及其它必要的電路完成增益控制功能;模數(shù)轉(zhuǎn)換模塊完成模擬信號的AD轉(zhuǎn)換;峰值計算模塊實時計算并判斷信號峰值;模糊推理模塊完成增益控制量的推理計算;超限檢測模塊實時檢測信號是否超量程;增益調(diào)整模塊根據(jù)模糊推理模塊的輸出,輸出增益控制編碼給信號調(diào)理模塊,完成自動增益的控制;輸出模塊將采集的數(shù)據(jù)還原輸出給系統(tǒng)。其工作原理為:原始信號經(jīng)過信號調(diào)理模塊后分為兩路,一路直接進(jìn)入模數(shù)轉(zhuǎn)換模塊,另一路進(jìn)入超限檢測模塊用于判斷是否超量程。信號經(jīng)過模數(shù)轉(zhuǎn)換后,一路進(jìn)入輸出模塊,另一路進(jìn)入峰值計算模塊,信號進(jìn)入峰值計算模塊后計算信號的峰值,并與目標(biāo)峰值比較后得到兩者的誤差及誤差變化率,作為模糊推理模塊的輸入。模糊推理模塊將峰值誤差及變化率作為輸入,通過將二者模糊化,再進(jìn)行模糊推理,最后解模糊輸出當(dāng)前增益編碼給增益調(diào)整模塊。增益調(diào)整模塊根據(jù)該編碼調(diào)整增益,完成自動增益控制。
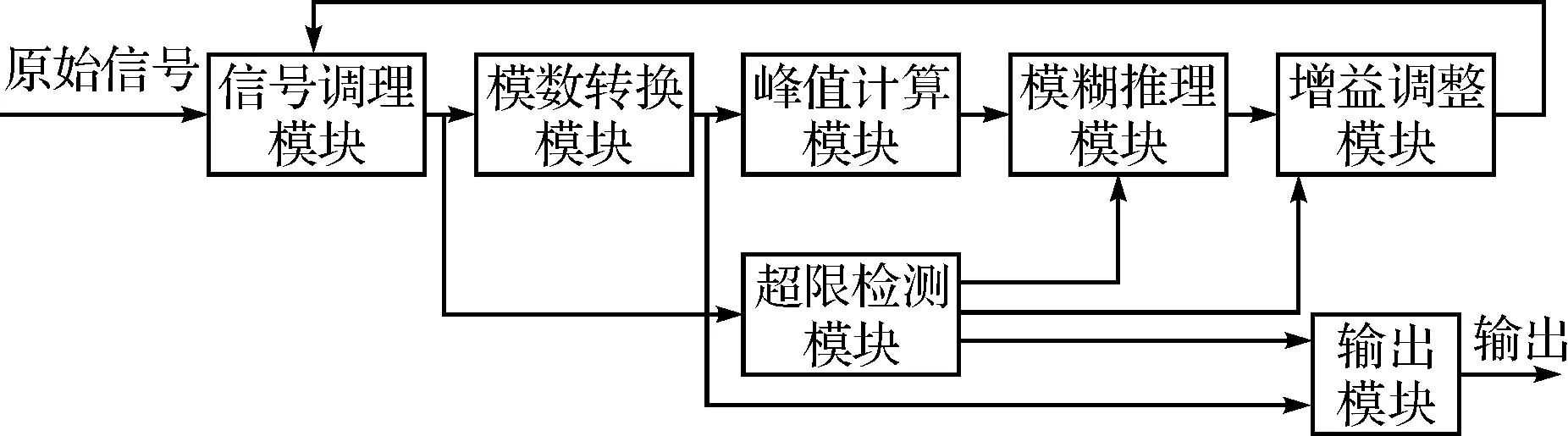
圖1 方案原理圖
3主要功能模塊的設(shè)計
3.1模糊推理模塊
模糊推理模塊是核心,該模塊包括三個工作步驟,分別為模糊化、模糊推理和解模糊。
模糊化:將輸入精確量(輸入量為峰值誤差及其變化率,輸出量為控制增益)轉(zhuǎn)換為模糊量。利用式(1)對基本論域進(jìn)行離散、分檔,將基本論域變換為模糊論域,再確定輸入輸出的語言變量及隸屬函數(shù),完成模糊化過程。
(1)
式中:x∈[a,b],n為離散度,a,b為基本論域的下限值和上限值。
模糊推理:根據(jù)設(shè)計的控制規(guī)則對峰值誤差及其變化率進(jìn)行推理(采用MAX-MIN關(guān)系合成推理法),最終得出增益模糊量;根據(jù)上下文可知,本模糊推理模塊是雙輸入(峰值誤差及其變化率)單輸出(控制增益)系統(tǒng),利用Matlab將模糊蘊(yùn)含關(guān)系矩陣計算好后存入微控制器,運行時直接查表可得結(jié)果,大大提高了效率。
解模糊:將增益模糊量清晰化,輸出給增益調(diào)整模塊對模擬信號進(jìn)行調(diào)理。模糊推理后得到是增益的模糊量,采用重心法解模糊,計算公式為
(2)
式中:zi為推理結(jié)論模糊集中各元素,U(zi)為zi對該模糊集的隸屬度,u為增益的清晰量。
由式(2)解模糊后,通過式(3)進(jìn)行論域變換后得到實際控制量:
(3)
式中:Umin、Umax分別是基本論域的下限和上限,Uomin、Uomax分別是模糊論域的下限和上限。
模糊推理模塊具體設(shè)計如下:
將各語言變量在論域上的模糊子集的隸屬函數(shù)均取用下式:
μ(x)=exp(-(x-c)2/2b2)
(4)
設(shè)當(dāng)前峰值誤差E、誤差變化率EC及增益K的語言值為:{負(fù)大,負(fù)中,負(fù)小,0,正小,正中,正大},用字母{NB,NM,NS,0,PS,PM,PB}表示,三者的論域為(離散度n=3):
{-3,-2,-1,0,+1,+2,+3}
根據(jù)本控制裝置的要求制定了模糊控制規(guī)則,如表1所示。
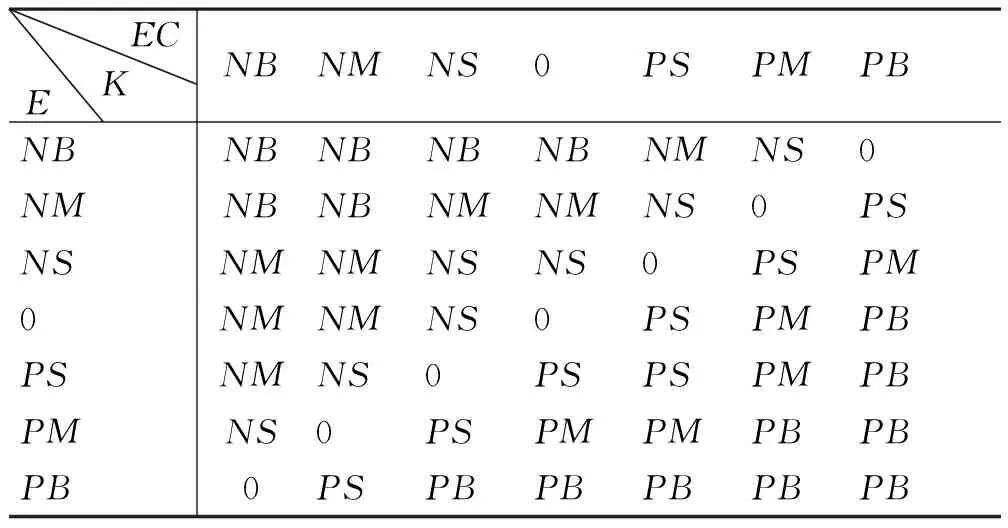
表1 增益K的模糊控制規(guī)則表
根據(jù)表1可計算出每條控制規(guī)則對應(yīng)的模糊關(guān)系子矩陣Ri(i=1,2,…,49),通過式(5)計算出總的模糊蘊(yùn)含關(guān)系矩陣R:
R=R1∪R2…Rn
(5)
將該矩陣存入微控制器,實時檢測計算峰值的誤差及其變化率并通過式(6)計算輸出增益模糊量:
U=(E×EC)·R
(6)
3.2超限檢測模塊
超限檢測模塊采用硬件電路方式實現(xiàn),保證中斷的快速性。其核心元件為LM139比較器,設(shè)計必要的外圍電路實現(xiàn)其功能。其原理圖如圖2所示。圖中,實際信號由4腳和7腳接入LM139,用于比較的量程上限電壓值由5腳接入,量程下限電壓值由6腳接入,由圖可知,當(dāng)信號在正常范圍時,比較器不翻轉(zhuǎn),正常輸出1,當(dāng)信號值大于上限電壓或低于下限電壓時,比較器翻轉(zhuǎn)為0,從而及時發(fā)出中斷信號。電路的輸出由電阻R1上拉到電源電壓VCC,同時設(shè)置過壓保護(hù)電路,由D1構(gòu)成電壓鉗位電路,將最大電壓鉗位VCC之內(nèi),保護(hù)微控制器不會過壓損壞。
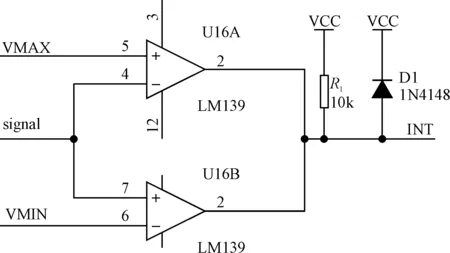
圖2 超限檢測電路
3.3峰值計算模塊
實時計算并判斷信號峰值,其峰值基本判別方法為:采集一組數(shù)據(jù)搜索最大值并結(jié)合數(shù)據(jù)變化趨勢(判別拐點)來確定峰值。信號峰值確定后與目標(biāo)峰值作差,兩者的誤差及誤差變化率作為模糊推理模塊的輸入。
4增益控制流程設(shè)計
軟件流程圖如圖3所示。開始時,將通道增益試設(shè)為1,然后檢測超限檢測模塊是否輸出中斷信號。如果沒有收到中斷信號,則進(jìn)入正常采集流程;若此時收到中斷信號,則將增益切換至最安全增益,繼續(xù)檢測中斷信號。若仍然收到中斷信號,則判為超量程;否則正常采集。數(shù)據(jù)采集后首先進(jìn)入輸出模塊輸出數(shù)據(jù), 然后進(jìn)行峰值計算、模糊推理及增益調(diào)整,增益控制完成后再判斷是否收到中斷信號,是則將推理模塊所有變量復(fù)位,然后增益切換至最安全增益,繼續(xù)判斷是否超量程,是則判為超量程;否則繼續(xù)采集數(shù)據(jù)。
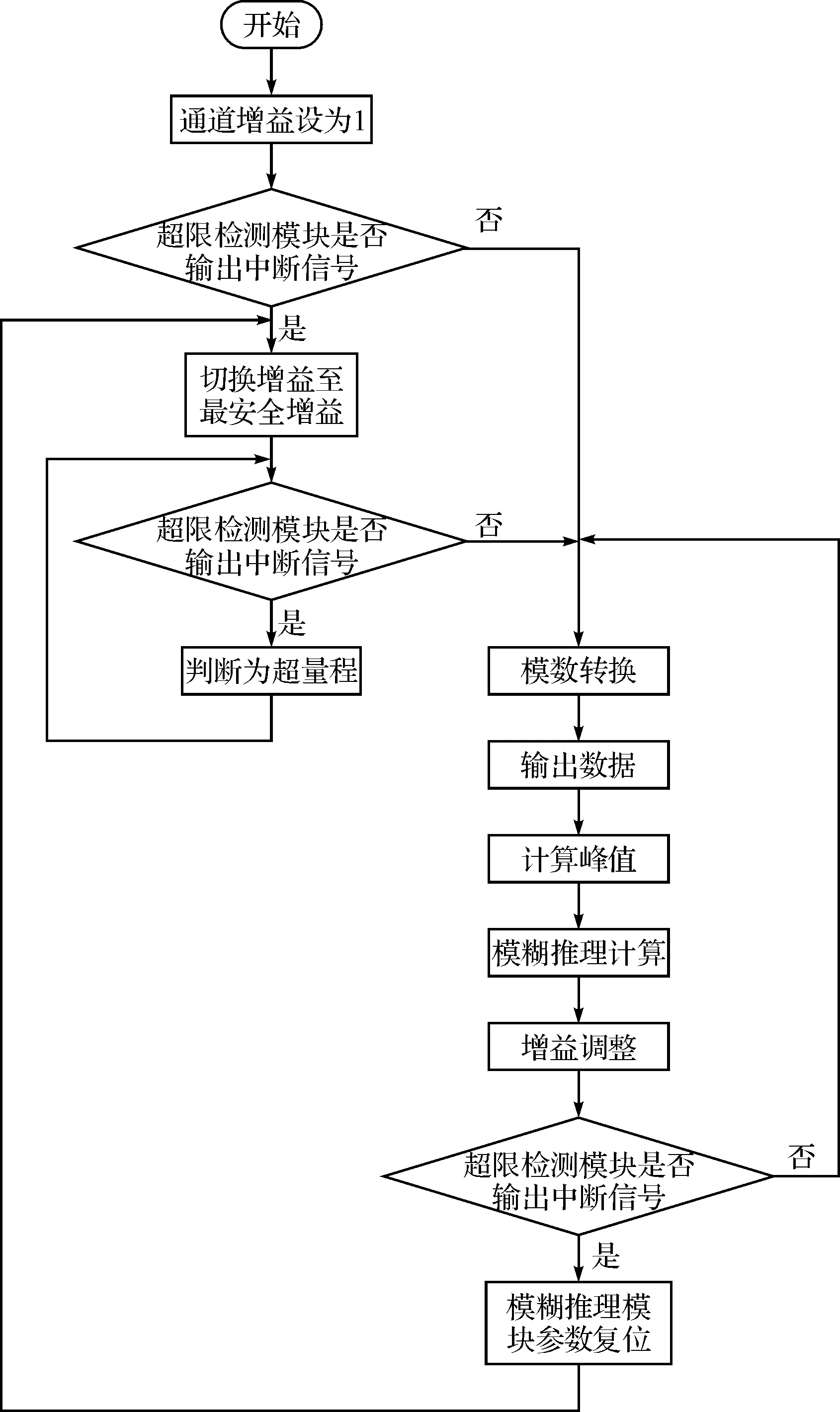
圖3 增益控制流程圖
5實驗驗證
為驗證本方案的有效性,針對圖4和圖5兩種信號進(jìn)行了實驗驗證。信號由任意波形發(fā)生器產(chǎn)生,通過采用帶有本文設(shè)計的自動增益控制方案的數(shù)據(jù)采集系統(tǒng)采集原信號并觀察增益的變化情況,圖4是模擬信號突變的情況,圖5是模擬瞬態(tài)信號情況。增益的變化情況如圖6和圖7所示。結(jié)果表明,本方案能夠根據(jù)信號的幅值及時調(diào)整增益,使得系統(tǒng)盡量以較大的增益采集信號以提高信噪比,同時在信號突變時能夠不失真地采集信號,保證了后續(xù)信號分析與處理的有效性及可信度。
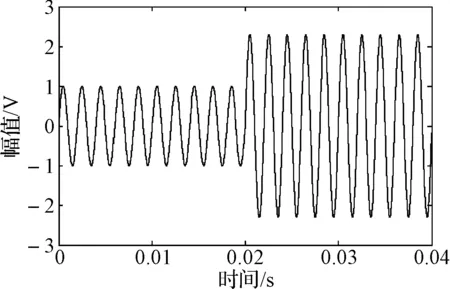
圖4 幅值突變信號
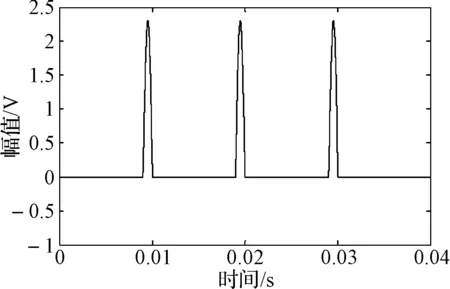
圖5 沖擊信號
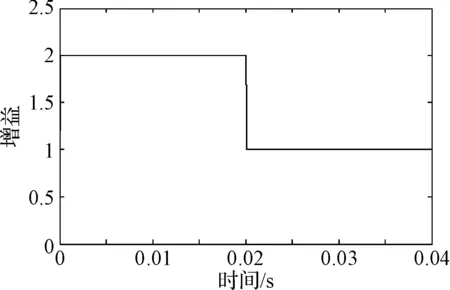
圖6 幅值突變信號情況下增益變化
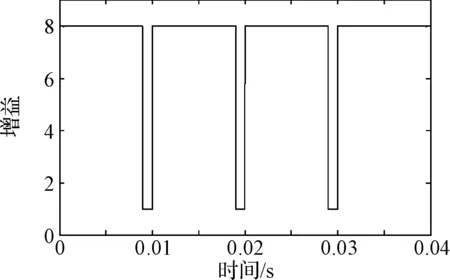
圖7 沖擊信號情況下增益變化
6結(jié)語
本文針對高精度信號采集需求的實際情況,提出了一種快速自動增益切換方案,結(jié)合模糊控制策略,很好地滿足了要求。實驗結(jié)果表明,本文提出的方案,能夠快速適應(yīng)信號幅值的變化,將信號幅值控制在合理的范圍內(nèi),使得小信號信噪比高、大信號不削波失真,提高了檢測結(jié)果的準(zhǔn)確性和可靠性,從而證明了本方案是有效可行的。
參 考 文 獻(xiàn)
[1] 周超.多帶模擬信號的采樣與重構(gòu)[J].傳感器與微系統(tǒng),2011,30(5):83-85.
[2] 謝述理.一種基于PCI的測井模擬信號采集系統(tǒng)[J].石油儀器,2005,19(3):18-20.
[3] 姚從潮,王新民,黃譽(yù),等.基于FPGA的高速模擬信號采集卡設(shè)計[J].計算機(jī)測量與控制,2011,19(10):2574-2577.
[4] 殷海俊,黃惠寧.艦船電子裝備的狀態(tài)監(jiān)測與故障診斷[J].艦船電子工程,2015,35(1):144-147.
[5] 馬晉,江志農(nóng),高金吉.基于瞬時轉(zhuǎn)速波動率的內(nèi)燃機(jī)故障診斷方法研究[J].振動與沖擊,2012,31(13):119-124.
[6] 馬波,魏強(qiáng),徐春林,等.基于Hilbert變換的包絡(luò)分析及其在滾動軸承故障診斷中的應(yīng)用[J].北京化工大學(xué)學(xué)報,2004,31(6): 95-97.
[7] 崔小鵬,王公寶,王潔.一種故障診斷模糊專家系統(tǒng)的實現(xiàn)[J].艦船電子工程,2014,34(1):135-139.
[8] 王松林,謝順依,王鼎.直流調(diào)速系統(tǒng)模糊復(fù)合控制的建模與仿真[J].艦船電子工程,2010,30(9):117-120.
[9] 賴于樹,李迅波,熊燕,等.基于模糊群決策的智能儀器故障診斷專家系統(tǒng)[J].儀器儀表學(xué)報,2008,29(1):206-211.
[10] 榮健,喬文釗.基于模糊神經(jīng)系統(tǒng)的多傳感器數(shù)據(jù)融合算法[J].電子科技大學(xué)學(xué)報,2010,39(3):376-378.
[11] 高炳微,邵俊鵬,韓桂華.電液伺服系統(tǒng)位置和力模糊切換控制方法[J].電機(jī)與控制學(xué)報,2014,18(5):99-104.
[12] 梁霄,張均東,李巍,等.水下機(jī)器人T_S型模糊神經(jīng)網(wǎng)絡(luò)控制[J].電機(jī)與控制學(xué)報,2010,14(7):99-104.
收稿日期:2016年1月8日,修回日期:2016年2月22日
作者簡介:王占友,男,博士后,工程師,研究方向:檢測與控制。何琳,男,碩士,教授,博士生導(dǎo)師,研究方向:振動與噪聲控制。崔立林,男,博士,助理研究員,研究方向:振動與噪聲控制。陳景兵,男,碩士,助理研究員,研究方向:振動與噪聲控制。
中圖分類號TP273
DOI:10.3969/j.issn.1672-9730.2016.07.034
Design and Implementation of A Fast Automatic Gain Control Project
WANG ZhanyouHE LinCUI LilinCHEN Jingbing
(Institute of Noise & Vibration, National Key Laboratory on Ship Vibration &Noise, Naval University of Engineering , Wuhan430033)
AbstractAnalog signal acquisition and processing has been applied widely, but high signal acquisition precision is demanded in some special field. The signal amplitude is required to be controlled within reasonable limits, that is, small signal should be amplified to improve noise ratio and big signal should be reduced to avoid clipping distortion, thus the high noise ratio and signal integrity can be ensured. The fixed-gain signal acquisition system can’t meet the qualification. For this reason, this paper proposes a fast automatic gain control project, which adopts fuzzy control for its feature of applying to nonlinear and uncertain system, at the same time, the function of overrun detection is designed to ensure fast reaction for signal mutation, thus this project can change gain according to signal intensity, consequently, this problem is resolved effectively. The experimental results show that this project possesses good effect.
Key Wordsanalog signal acquisition, automatic gain, fuzzy control
