一種汽車保險盒熔斷器插接位置檢測方法
2016-08-02 03:58:42李修偉孔研自天津科技大學機械工程學院天津300222
天津科技大學學報 2016年3期
關鍵詞:檢測
馬 臣,李修偉,孔研自,劉 琪,李 亞(天津科技大學機械工程學院,天津 300222)
一種汽車保險盒熔斷器插接位置檢測方法
馬 臣,李修偉,孔研自,劉 琪,李 亞
(天津科技大學機械工程學院,天津 300222)
針對汽車保險盒熔斷器插接位置檢測,提出了一種以顏色識別為基礎,結合邊緣檢測與特征匹配理論的檢測方法.此方法通過比較樣板圖像和待檢測圖像中關注區域的顏色信息差異,判斷熔斷器插接位置正確與否;通過對樣板的大量實驗,解決了現場光線干擾造成的檢測失準問題;采用對圖像進行均衡化處理和邊緣提取的方法,解決了顏色經常變化的非熔斷器位置檢測的難題.工業現場實際測試表明,該方法穩定可靠.
汽車保險盒;色彩檢測;邊緣檢測技術;機器視覺系統
汽車保險盒是汽車電子控制元件中的關鍵部件,其中的熔斷器如果插接錯誤,會對汽車行駛安全造成極嚴重的后果[1].保險盒生產中一個重要的環節就是檢查熔斷器插接位置是否正確.傳統的檢查方法是人工將保險盒與標準色板比對,準確度難以保證.
機器視覺是利用光電成像系統將被攝取目標轉換成圖像信號,再通過圖像處理設備進行數字處理,系統根據圖像的像素分布、亮度和顏色等信息,進行尺寸、形狀、顏色等的識別,并進行各種運算來抽取目標的特征.因此可以考慮采用顏色識別系統代替人工,進行熔斷器插接位置檢測.
目前,國內外針對顏色識別的研究主要集中在硬件系統搭建[2-5]、顏色檢測基本理論[6-9]等,對工業現場中光線擾動的影響研究較少.本文采用顏色識別系統進行熔斷器插接位置檢測,并根據工業現場實際情況,優化現有顏色檢測算法,以提高顏色檢測的魯棒性.
1 熔斷器顏色檢測原理
圖1為某型號汽車保險盒,需要檢測17片熔斷器插接位置是否正確以及熔斷器夾子、固定塊是否安裝.熔斷器的品質標準按照國內片式熔斷器行業標準QC/T 420—1999規定執行.待檢測的熔斷器規格(整體顏色標志)主要有10,A紅色、15,A藍色、20,A黃色、30,A綠色.

圖1 某型號汽車保險盒主要檢測部位示意圖Fig. 1 Main inspection position of a certain type of automobile fuse box
熔斷器插接位置檢測是通過對比樣本圖像和待檢測圖像在相同位置的顏色信息是否一致,從而判斷插接是否正確.具體步驟如下:
(1)在樣本圖像中選定標準熔斷器保險絲的位置(即關注區域),以此作為一個基準顏色樣板.
(2)設置色彩匹配模式的參數,例如匹配的精度要求、顏色飽和度閾值等.
(3)提取關注區域的顏色信息.
(4)在待檢測的保險盒圖像中提取相同關注區域的顏色信息.
(5)對比取得的兩個顏色信息,判斷是否匹配.
在具體實現中,采用由NI Vision提供的基于色譜的顏色分析函數實現以上功能,其原理是比較兩幅圖像中選定區域內顏色信息的相似程度,即色譜的匹配程度,得出匹配分值[10].其中,色譜是基于HSL顏色空間來定義的.HSL色彩模式是工業界的一種顏色標準,HSL顏色空間適合彩色圖像的處理和借助視覺來定義可解釋的局部特性,圖像的灰度信息可以獨立于色彩信息進行分析,因此能夠廣泛應用于機器視覺應用領域[11].
HSL顏色空間的坐標系是圓柱坐標系,顏色均被定義在一個紡錘體內,如圖2所示.HSL把顏色描述為在圓柱坐標系內的點,這個圓柱中心軸上的取值為自底部的黑色到頂部的白色,在它們中間是灰色,繞這個軸的角度對應于色相,到這個軸的距離對應于飽和度,而沿著這個軸的高度對應于亮度、色調或明度[12].
在LabVIEW中,色譜是表示HSL顏色空間中顏色信息的一維數組,它保存了關于圖像中顏色分布的重要信息,對于進行進一步分析,比如通過尋找色譜中數值最大的元素來獲得圖像中主要顏色的信息等十分必要[3].HSL中獨立于灰度信息的顏色空間被分成幾個相等的扇形區,每個扇形區又被飽和度閾值分成兩塊,色譜數組中每個元素的值表示關注區內所有像素在顏色扇區中各自所占的百分比,同時NI Vision使用了一種特殊的適應學習算法判斷像素是屬于黑色或白色,并將黑色和白色像素在所有像素中所占的百分比分別存儲在色譜數組的最后兩位,以便于被顏色分析函數使用,如圖3所示.色譜顯示了圖像在HSL顏色空間內的顏色分布.按照色譜的劃分規則,在程序中將色譜數組元素數量分為3個等級:低靈敏度下色譜被分成2×7+2=16個區間;中靈敏度下色譜分成2×14+2=30個區間,高靈敏度下色譜分成2×28+2=58個區間,靈敏度越高,對相近顏色的甄別能力越強.檢測之前應依照檢測精度要求進行相應的靈敏度設置.本文檢測由于現場條件復雜,保險絲顏色相近,需要更細致地區分顏色,因此選用高靈敏度的扇形區間劃分.

圖2 HSL顏色空間結構示意圖Fig. 2 HSL color space

圖3 顏色空間與色譜數組的關系Fig. 3 Color space and the color spectrum array
顏色分析函數是對兩個色譜向量進行比較,以兩個數組的Manhattan距離判斷色譜的相似程度.Manhattan距離可以解釋為標準坐標系上兩點的絕對軸距總和[10].若向量A為(x1,x2,?,xn),向量B為(y1,y2,?,yn),則兩者的Manhattan距離為

事實上,在計算兩色譜的Manhattan距離之前,LabVIEW的顏色分析函數會自動為每個色譜數組乘以一個加權函數,以補償在生成色譜時產生的誤差,使最終得到的色譜相似程度更加準確.
2 熔斷器插接位置檢測
執行相同標準生產的熔斷器會因光照條件的不同、廠家不同等原因在顏色上有所差異.實驗表明,這種差異會表現為色譜的較大變化.圖4為在兩種不同光照條件下的同一熔斷絲圖像,其色譜數組如圖5所示,可見色譜的峰值已經發生了偏移,各元素的大小和比例也都出現了偏差.
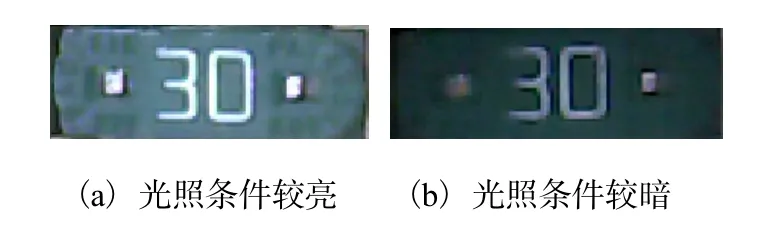
圖4 同一熔斷絲在不同光照條件時的圖像Fig. 4 Images of the same fuse in different light conditions

圖5 圖4對應的色譜數組表現Fig. 5 Histogram of color spectrums of images in Fig. 4
計算色調及飽和度的可靠性依賴于亮度[2],如果光照條件發生變化,在場景中表面所反射光的頻譜構成也會改變,即失去彩色恒常性.在工業現場條件下,光照條件不穩定會導致圖像發生過度曝光或曝光不足的情況,從而影響感光元件對色彩的還原,使色譜內的元素比例發生變化,甚至影響峰值出現的位置,直接導致了此種檢測方式的失效.因此,單純依靠色譜匹配來進行熔斷器位置檢測還是不夠的.
針對檢測環境的光照變化對圖像質量的影響,可以采取兩項措施來解決.一是,摒棄次要因素,突出被測主體.首先,將檢測精度設置為高靈敏度,生成樣本圖像的色譜,并記錄原始樣本圖像的色譜峰值位置;然后,以該峰值位置為中心設定一個較小的范圍,在此范圍內的峰值均予以通過,對此范圍以外的(即次要顏色)予以忽略,經過不斷反復記錄學習,范圍就會更加精確,最終能夠實現準確的檢測.二是,針對曝光過度和曝光不足的因素,增加了判斷條件,即當色譜峰值出現在除黑、白外其他元素時,認為曝光正常,否則認為可能是曝光不當產生影響.此時,如果除黑、白外其他元素的值均小于定值(15%),則認為不是曝光影響所致;如果有元素超過了此定值,則認為是曝光問題,強制去除掉色譜中的黑、白色信息,然后對色譜剩余元素再進行一次峰值檢測.圖5反映出的在不同光照條件下的色譜差異,說明在不同光照情況下,熔斷絲的色譜峰值發生了細微的偏移,通過大量實驗驗證,當待測件色譜數組峰值位置與原始圖像色譜數組峰值位置間的距離在[-3,3]內時可判定熔斷器匹配.
3 非熔斷器特征檢測
對于非熔斷器的檢測點,例如熔斷器夾子和固定塊,由于缺少相應的國家標準,使得其個體顏色差異較大,不應再使用顏色檢測方法,因此考慮引入模版匹配技術.模版匹配是一種基于模型的方法,通過搜索已知模型和一幅圖像像素之間的最佳相關性來提取形狀[4].首先,在樣本圖像中截取出熔斷器夾子和固定塊的子圖像,將這些子圖像作為模板.然后,通過對模板圖像的處理,提取出能夠較好描述模板的模型,即一系列表現熔斷器夾子和固定塊的像素.最后,進行模板匹配計算,通過已知模型在待檢測圖像中搜索匹配.
由于要突出被檢測區域的特征,要先使圖像具有高對比度和多變的灰度等級,改善圖像的質量.先將原灰度圖像從HSL顏色空間提取出Luminance分量進行均衡化處理[7],用非線性的Prewitt邊緣檢測算子對圖像進行濾波處理[13],得到較清晰的特征邊緣圖像,再進行模板匹配.因為非線性的Prewitt算子是一種高通濾波器,因而能夠顯著突出亮度強度在水平向和縱向的變化,進而提取出物體的輪廓.算子維數越大,處理后的邊緣就越厚.Prewitt算子[14]如圖6所示.用兩種算子分別在橫向和縱向濾波處理后取其最大值,作為相應像素的灰度值[12].

圖6 橫向和縱向Prewitt算子Fig. 6 Horizontal and vertical Prewitt Kernel

對圖像使用非線性的Prewitt算子濾波后,P點像素灰度值為

圖7為原始圖像、均衡化、Prewitt濾波處理效果對照.通過以上處理可以方便而清晰地提取出特征輪廓,便于進行后續的模板模型生成處理.
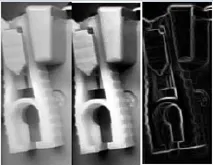
圖7 原始圖像、均衡化和Prewitt濾波處理效果對照Fig. 7 Comparison of source image,image after equalitation processing and image after Prewitt filter processing
生成模板模型的方法有:(1)生成圖像的幾何模型;(2)對圖像的非均勻性采樣;(3)提取模板的位置與角度信息[15].本文使用NI Vision提供的一種不均勻采樣方法,根據前面處理后的圖像提取出一系列描述邊緣和區域特征的像素,用以生成模板模型[10].
包含模板模型的子圖像大小為K×L,(x,y)點像素灰度值為w(x,y);待檢測圖像大小為M×N,且K≤M,L≤N,(x,y)點灰度值為f(x,y),當模型左上角像素位于待檢測圖像(i,j)位置時,模型與待檢測圖像的相關性的計算公式為

模板的匹配過程見圖8.在進行模板匹配之前,首先創建一個二維數組作為累加器空間,用于存儲模板相對于圖像在不同位置的匹配情況,然后從待檢測圖像左上角的像素(0,0)開始,逐行對每個像素進行相關性的計算.將結果存入累加器的相應位置[16].計算所有匹配之后,累加器中的數組作為輸出,數組C中的最大元素即對應了最佳相關性的位置,也就是模板大多數像素與圖像匹配的位置[17-18].由此便可確定被檢測特征在圖像中準確且唯一的位置.

圖8 模板與待檢測圖像的相關性計算過程Fig. 8 Correlation procedure between template and image
為了驗證系統的準確性與可靠性,在柯文注塑制模有限公司的裝配現場進行了實際檢測.每次檢測平均耗時1,s,加上工人取放保險盒的時間5~6,s.檢測400件約需要40,min,相比原來人工檢測的效率明顯提高,并且保證了準確性.在最初的檢測中出現了5次誤報,原因是現場光照條件發生劇烈變化及系統初始預熱時間不足,待開機系統穩定之后不再出現誤報,效果較理想.
4 結 語
本文提出了一種汽車保險盒熔斷器插接位置檢測方法,利用機器視覺方法,運用顏色檢測函數,從色譜峰值分布入手,解決了現場光線干擾造成的檢測失準問題.同時,采取對圖像進行均衡化處理和邊緣提取的方法,解決了色差變化較大的非熔斷器位置檢測的難題.工業現場的實際測試表明,該方法穩定可靠.
[1] 李亞,張振寰,羅鳴. 基于LabVIEW的汽車保險盒回路質量檢測系統[J]. 計算機測量與控制,2010,18(9):2041-2043.
[2] 陳曦,趙辰雪. 顏色檢測系統的設計與實現[J]. 自動化儀表,2011,32(11):23-24,28.
[3] 盧川英,于浩成,孫敬輝,等. 基于TCS230傳感器的顏色檢測系統[J]. 吉林大學學報:信息科學版,2008,26(6):621-626.
[4] 季峰,陳炳若,王嵩. 基于單片機的顏色識別系統[J].測控技術,2004,23(4):26-28.
[5] 黃天明. 一款基于STC12C5410AD的簡單的顏色識別系統[J]. 生命科學儀器,2011,9(4):33-35.
[6] 王安敏,楊起. 一種結合SVM的顏色識別系統研究[J]. 機械與電子,2012(4):15-17.
[7] 楊海城,洪景新,陳輝煌. 一種基于顏色跟蹤的彩色邊緣檢測算法[J]. 廈門大學學報,2006,45(1):60-62.
[8] 韓殿元. YCbCr顏色模式下基于L-M算法優化的火焰識別方法[J]. 計算機科學,2010,37(8):287-289.
[9] 張力,鄧亞航,饒小李. 顏色特征模型在靜態車輛檢測中的應用[J]. 武漢工程大學學報,2015(1):73-78.
[10] National Instruments Corporation. NI Vision Concept Manual[M]. Texas:National Instruments Corporation Headquarters,2005:1-3.
[11] Andreas K,Mongi A. 彩色數字圖像處理[M]. 北京:清華大學出版社,2010:46.
[12] Tinku A,Ajoy K R. Image Processing:Principles and Applications[M]. 北京:清華大學出版社,2007:96.
[13] 王涌天,林精敦,陳靖,等. 隨機樹特征匹配算子性能研究[J]. 北京理工大學學報,2009(11):988-993.
[14] 張闖,遲健男,張朝暉,等. 基于邊緣檢測與雙邊濾波的彩色圖像去噪[J]. 電子學報,2010(8):1776-1783.
[15] 孫向軍,曹立鑫,劉鳳玉. 基于角仿射不變的特征匹配[J]. 中國圖象圖形學報,2004(5):79-83.
[16] 邵振峰,陳敏. 尺度、旋轉以及亮度穩健的高分辨率影像直線特征匹配[J]. 光學精密工程,2013(3):790-798.
[17] 馮曉偉,田裕鵬. 基于形狀內容描述子的點特征匹配[J]. 光電工程,2008(3):108-111,116.
[18] 蔡雪,聶杰,王祖華,等. 洞緣形態對復合樹脂顏色匹配的影響[J]. 北京大學學報:醫學版,2015(1):120-123.
責任編輯:常濤
A Method for Inspecting the Location of the Inserted Fuse in Automobile Fuse Box
MA Chen,LI Xiuwei,KONG Yanzi,LIU Qi,LI Ya
(College of Mechanical Engineering,Tianjin University of Science & Technology,Tianjin 300222,China)
A new method for inspecting location of the inserted fuse in automobile fuse box has been studied,based on color identification,edge detection and pattern matching technology.Using this method,the position of fuse can be inspected by comparing the color information of the relevant region between pattern images and the images which need to be inspected.Experiments with pattern images indicate that the wrong results caused by different light conditions can be avoided,and image equalization processing and edge extraction can solve the detection problems of the non fuse parts whose color is similar to the base or always changes.Industrial practical tests show that this method is stable and reliable.
automobile fuse box;color inspecting;edge detection;machine vision system
TP273.5
A
1672-6510(2016)03-0074-05
10.13364/j.issn.1672-6510.20150086
2015-06-26;
2016-01-07
天津科技大學實驗室創新基金(1301A120X)
馬 臣(1983—),男,天津人,實驗師;通信作者:李 亞,教授,tustly@tust.edu.cn.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48