梯形加減速算法在伺服系統(tǒng)中的應用研究
2016-08-01 06:27:38李慶華
無線電工程 2016年7期
李慶華
(中國電子科技集團公司第五十四研究所,河北 石家莊050081)
?
梯形加減速算法在伺服系統(tǒng)中的應用研究
李慶華
(中國電子科技集團公司第五十四研究所,河北 石家莊050081)
摘要伺服系統(tǒng)中經(jīng)常出現(xiàn)大角度調(diào)轉(zhuǎn)需求和追蹤問題。典型PI算法在大角度調(diào)轉(zhuǎn)時會出現(xiàn)嚴重的超調(diào)和振蕩,因此要采取梯形加減速等改進算法來改善系統(tǒng)性能。分析了一種典型梯形加減速算法的原理,通過仿真和實際系統(tǒng)試驗驗證其效果,指出該算法對追蹤問題具有的局限性,并提出了二次位置追蹤算法和位置-速度追蹤算法這2種減小局限性的方法。通過實際系統(tǒng)驗證,證明改進方法有效。
關(guān)鍵詞伺服系統(tǒng);PI;梯形加減速;位置-速度追蹤算法
0引言
在跟蹤快速機動目標的應用場合,對伺服系統(tǒng)的快速性和穩(wěn)定性要求很高。目前伺服系統(tǒng)一般采用PI算法[1],對于連續(xù)位置指令可以快速高精度響應,但是對于大角度調(diào)轉(zhuǎn)情形,由于積分飽和效應,會引起大的超調(diào)和多次振蕩,產(chǎn)生的沖擊會減小設(shè)備的壽命并可能造成安全隱患。盡管可以采取積分分離等改進措施,效果仍然不理想。
梯形加減速算法是根據(jù)誤差按指定加速度調(diào)節(jié)速度指令,因此速度是連續(xù)的,盡管加速度的不連續(xù)也會造成沖擊,但相對系統(tǒng)規(guī)模而言沖擊較小,算法簡單和響應快的優(yōu)勢卻使得其適用性很強。
在一個3.7 m天線系統(tǒng)中采用梯形加減速算法驗證其效果,大角度調(diào)轉(zhuǎn)時天線可以平穩(wěn)快速地指向目標位置,沒有超調(diào)和振蕩。但在給定斜坡函數(shù)即速度階躍時,產(chǎn)生了系統(tǒng)不穩(wěn)定、穩(wěn)態(tài)有差等一系列問題。本文就這些問題進行分析,并給出解決方法。
1梯形加減速算法原理
1.1一類伺服系統(tǒng)的特征
伺服系統(tǒng)的通用化要求不外乎穩(wěn)定、快速和準確地隨動目標[2]。但是,根據(jù)目標特性的不同和天線伺服系統(tǒng)規(guī)模的大小,伺服系統(tǒng)也會對上述3個指標有所側(cè)重。
機動目標沒有確定軌道,在近場時,相對地面天線其速度快、加速度大,對伺服系統(tǒng)的快速性要求很高。實際的工作中需要各種操作模式,有利用引導使天線進入主波束后切入跟蹤,有跟蹤、引導隨時人工切換,等等。這就要求天線在追蹤(引導狀態(tài))時能夠快速平穩(wěn)地跟上引導值,各種方式切換時能夠平穩(wěn)無超調(diào)和振蕩。本文的目的是找出一種能夠支持大角度調(diào)轉(zhuǎn)(靜態(tài)及低速下的大角差引導)及追蹤(快速下的大角差引導)方法并驗證其實效。
1.2典型梯形加減速伺算法原理
梯形加減速算法用作大角度調(diào)轉(zhuǎn)時對系統(tǒng)速度、加速度的控制。其運動過程為:運動起始,天線以給定加速度加速運動,當天線速度達到設(shè)定值后保持勻速運動;在此期間實時計算是否到達如下位置,即從該位置起,以給定加速度減速運動,到達目標點時天線速度減為零;從上述位置減速運動,到達目標點。
大角度調(diào)轉(zhuǎn)時的運動包括勻加速段、恒速段和勻減速段3部分[3],速度曲線呈梯形。在文獻[4-6]中均指出,當調(diào)轉(zhuǎn)距離短時,可能沒有恒速段。此時速度曲線呈三角形[7]。
為簡化算法,實際操作中采用速度-位置自適應算法:設(shè)定一個小的誤差門限,當天線位置距離目標位置較遠,即誤差大于門限時采用位置開環(huán)的速度控制,當調(diào)轉(zhuǎn)接近完成時誤差小于門限,轉(zhuǎn)入位置閉環(huán),利用PI算法提高控制精度。
2梯形加減速算法改進及其在伺服系統(tǒng)中的應用
2.1典型加減速控制存在的問題
上述典型加減速控制是針對大角度調(diào)轉(zhuǎn)問題的,在實際操作中沒有任何問題。比如在一個3.7 m天線系統(tǒng),設(shè)定最大速度35°/s,最大加速度20°/s2,分別給定10°和70°階躍時,仿真的調(diào)轉(zhuǎn)曲線如圖1和圖2所示。
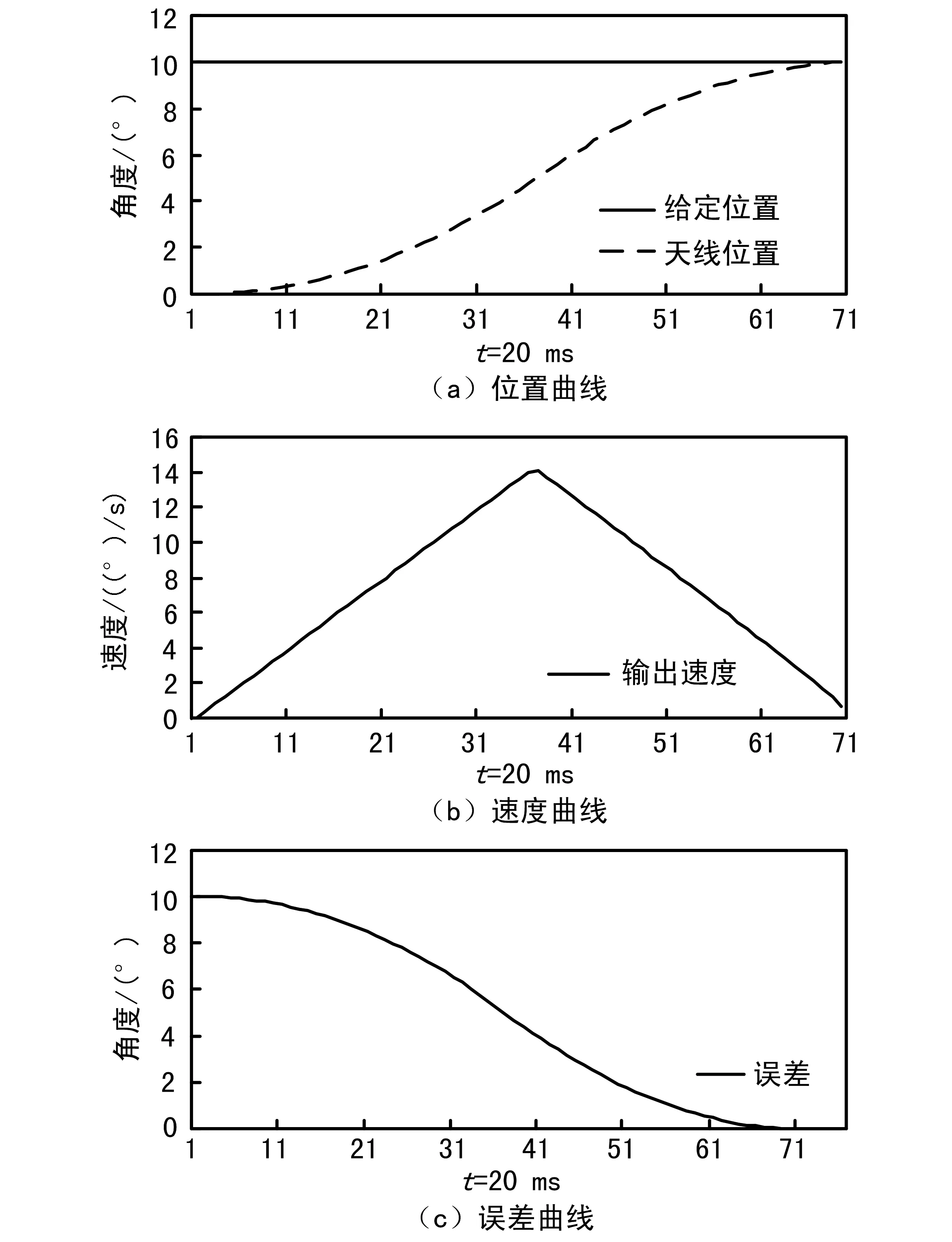
圖1 10°階躍調(diào)轉(zhuǎn)曲線
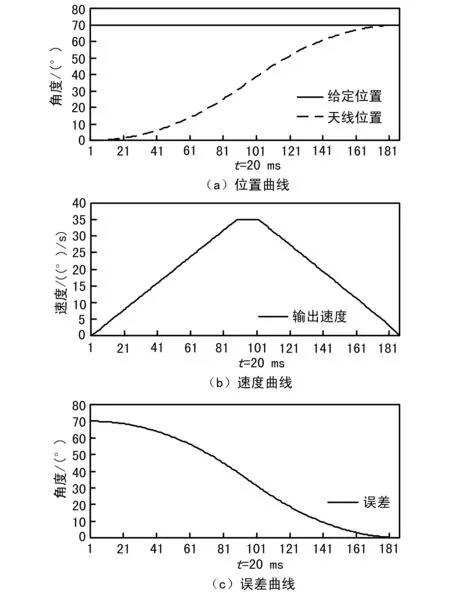
圖2 70°階躍調(diào)轉(zhuǎn)曲線
由圖1和圖2可以看出,10°階躍時由于調(diào)轉(zhuǎn)行程小,沒有恒速段,速度曲線呈三角形;70°階躍時速度曲線則是典型的梯形,但是天線都能很快通過加速—減速過程平穩(wěn)地調(diào)整到指定位置,沒有超調(diào)。
但是,當給定斜坡函數(shù)即速度階躍時,如設(shè)定10°/s的等速運動,天線很快調(diào)整進入到穩(wěn)態(tài),顯示轉(zhuǎn)速確實正確,但是顯示偏差卻不是零,而是一個常量,具有重復性,如圖3所示。二型伺服系統(tǒng)對給定斜坡函數(shù)應該是穩(wěn)態(tài)無差的,但給定的等速值又遠遠沒有達到系統(tǒng)最大值,那么,這個偏差是哪里來的?
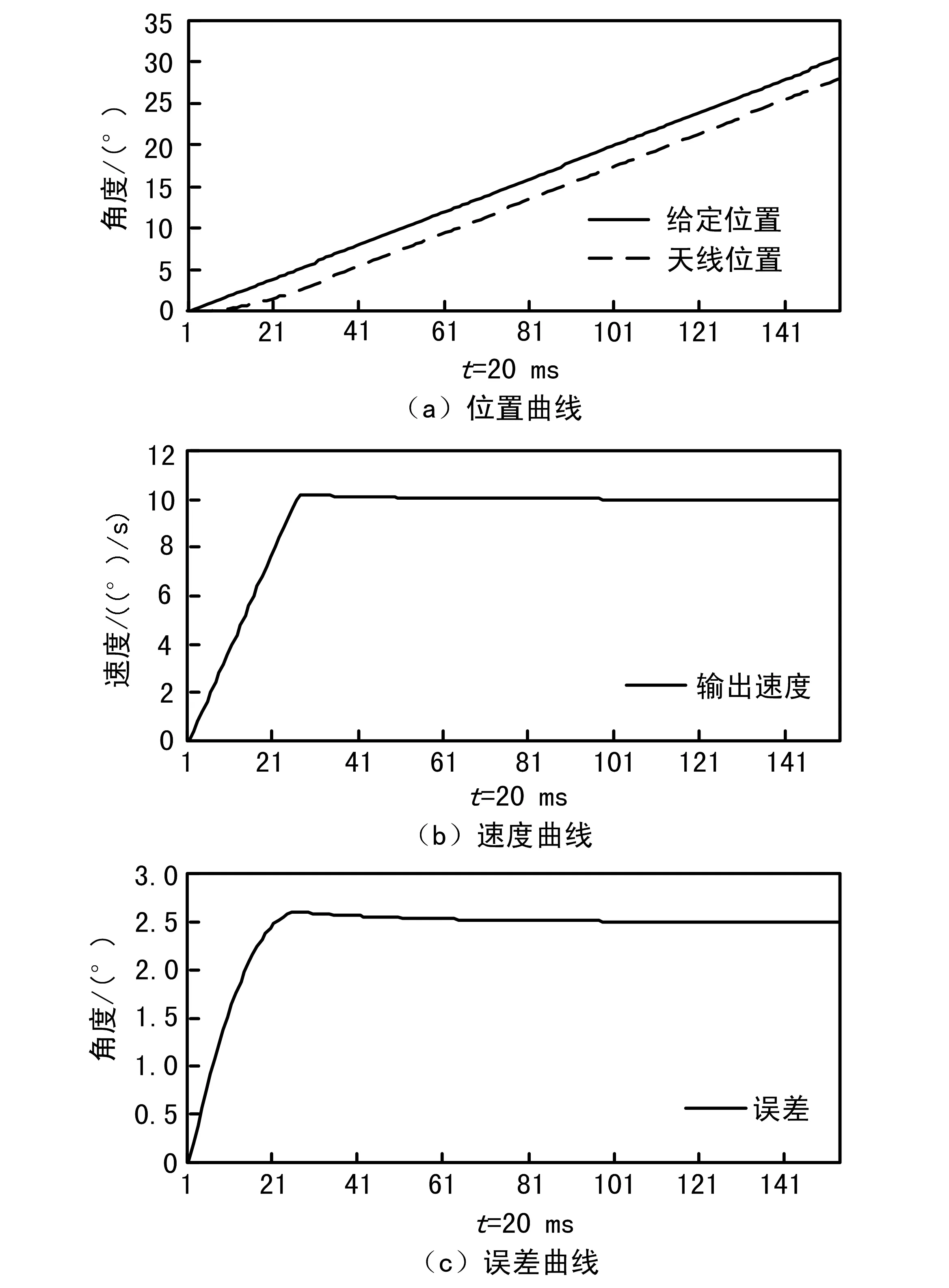
圖3 10°/s速度階躍調(diào)轉(zhuǎn)曲線
經(jīng)過仔細觀察和分析,確認是調(diào)整沒有進入位置閉環(huán)狀態(tài),也就是說穩(wěn)態(tài)時誤差大于閉環(huán)門限,伺服處于開環(huán)狀態(tài)。將閉環(huán)門限向上調(diào)整,又出現(xiàn)2種現(xiàn)象:當閉環(huán)門限大于值后,調(diào)整可以進入位置閉環(huán)狀態(tài),只是閉環(huán)初期有抖動;當閉環(huán)門限在某值附近時,天線以極大概率進入不穩(wěn)定狀態(tài),抖動劇烈。
經(jīng)過分析可以得到一個結(jié)論:在減速段,當大于閉環(huán)門限的某一誤差對應產(chǎn)生的速度恰好等于給定速度時,調(diào)整將進入穩(wěn)態(tài)。因為不能位置閉環(huán),此時誤差將保留。如果調(diào)整給定速度,偏差也將隨之變化,給定速度越大,這個偏差也越大。當給定速度對應的誤差小于但接近閉環(huán)門限時,可以進入閉環(huán)狀態(tài),由于此時閉環(huán)算法中的積分項為零,天線僅以比例項運動,若相應速度小于給定轉(zhuǎn)速,將導致誤差加大而退出閉環(huán)門限,從而重新開始梯形加減速控制,由此產(chǎn)生振蕩。
2.22次位置追蹤算法
為實現(xiàn)大角度調(diào)轉(zhuǎn)的平穩(wěn)性,現(xiàn)在假設(shè)閉環(huán)門限取一個比較小的值,這樣問題歸結(jié)為:如何使天線逼近目標和如何平穩(wěn)進入閉環(huán)。
仍然觀察上述有差追蹤過程。進入穩(wěn)態(tài)后算法輸出維持了與目標相同的速度,如果此時把該輸出保存起來,例如保存在積分項,將輸出清零,總輸出改為算法輸出和積分項相加,那么天線仍維持與目標同速。由于此刻天線與目標相對靜止,把這種狀態(tài)視作另一次大角度調(diào)轉(zhuǎn),調(diào)整后的狀態(tài)應該是位置上追蹤上目標,速度與目標相同(雖然第2次的大角度調(diào)轉(zhuǎn)速度減為零,但此時的速度指令保存在積分項中)。此時進行位置閉環(huán),由于積分項已經(jīng)有維持目標速度的指令,比例項因為誤差小(閉環(huán)門限很小)所以也很小,切換過程將十分平穩(wěn),這樣通過2次梯形加減速控制實現(xiàn)了對斜坡函數(shù)的追蹤。
2.3位置-速度追蹤算法
2次位置追蹤算法盡管可以實現(xiàn)對斜坡函數(shù)輸入的跟蹤,但是有些繁瑣,調(diào)整過程也比較長。可以通過以下方法簡化調(diào)整過程。
將原梯形加減速控制對象由追蹤目標位置改為同時追蹤目標位置和速度,這樣當天線跟上目標時天線的轉(zhuǎn)速和目標速度相同,此時進行閉環(huán)效果同前述算法。
給定誤差和速度,對各種可能出現(xiàn)的情況進行仿真分析,證明該算法結(jié)果正確。仍然以10°/s的速度階躍為例,從閉環(huán)原點開始施加階躍,天線追蹤的曲線如圖4所示。從距離40°的位置施加反向階躍,天線迎頭趕上的調(diào)整過程如圖5所示。2種情況最后天線都調(diào)整到位置、速度均與給定相同。
該算法的關(guān)鍵在目標速度的準確獲取,流程比較簡單,此處不再贅述。
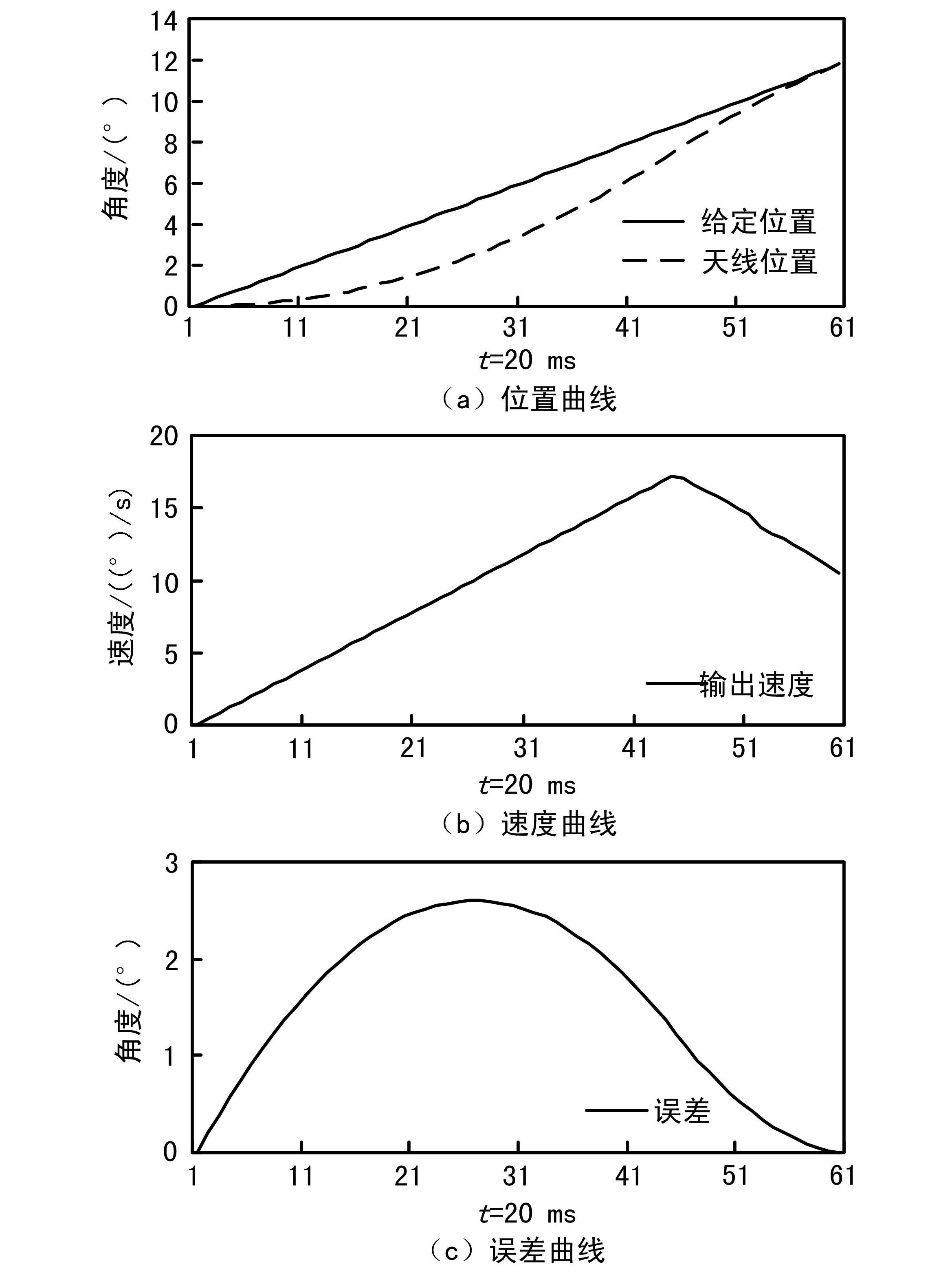
圖4 10°/s速度階躍位置-速度追蹤曲線

圖5 10°/s反向速度階躍位置-速度追蹤曲線
3結(jié)束語
大角度調(diào)轉(zhuǎn)和動態(tài)追蹤等情況下,常規(guī)PI校正帶來快速性和穩(wěn)定性的矛盾,直觀表現(xiàn)就是大超調(diào)和多次振蕩。通過仿真證明,在典型梯形加減速算法的基礎(chǔ)上,采用位置-速度追蹤算法可以有效解決該問題,并且可以滿足斜坡函數(shù)給定情況下的應用。經(jīng)過在一套3.7 m天線系統(tǒng)上反復試驗驗證,該算法穩(wěn)定可靠,試驗結(jié)果與仿真結(jié)論相符。在試驗中,采用了對輸入量的跟蹤-微分濾波器(TD)算法來近似獲得目標速度量,當然也可以利用其他手段來獲得目標速度量。相對于指數(shù)算法、S曲線算法等,該算法運算量要小得多,對于以低成本嵌入式處理器為控制器的系統(tǒng),該算法有推廣價值。
參考文獻
[1]韓京清.自抗擾控制技術(shù)[M].北京:國防工業(yè)出版社,2008.
[2]胡壽松.自動控制原理[M].北京:科學出版社,2007.
[3]吳基斌.運動控制關(guān)鍵算法及嵌入式實現(xiàn)研究[D].廣州:華南理工大學,2010.
[4]馬志建.車載定向天線穩(wěn)定跟蹤平臺的研究與開發(fā)[D].濟南:山東科技大學,2009.
[5]趙明峰.基于PLCopen的運動功能模塊的建模與實現(xiàn)[D].武漢:華中科技大學,2013.
[6]許鑫.嵌入式點膠控制系統(tǒng)研究與實現(xiàn)[D].武漢:華中科技大學,2014.
[7]嚴樂樂.基于DSP的運動控制器的軟件開發(fā)[D].南京:南京航空航天大學,2007.
doi:10.3969/j.issn.1003-3106.2016.07.15
收稿日期:2016-03-31
基金項目:國家部委基金資助項目。
中圖分類號TP202+.5
文獻標志碼A
文章編號1003-3106(2016)07-0056-04
作者簡介
李慶華男,(1973—),工程師。主要研究方向:自動控制。
Research on Application of Trapezium Ac/De Algorithm in Servo System
LI Qing-hua
(The54thResearchInstituteofCETC,ShijiazhuangHebei050081,China)
AbstractThe large-angle rotation requirement and tracing problem often exist in conventional servo system.The typical PI algorithm may lead to large overshoot and vibration,so the improved algorithms are required to improve system performance,such as trapezium acceleration and deceleration(Ac/De).This paper analyzes the principle for the trapezium Ac/De algorithm,validates the effect of the algorithm by simulation and actual system testing,and indicates the limitations in tracing.Two methods are presented to reduce the limitation,Twice-Position Tracing algorithm and Position-Velocity Tracing algorithm.The test results for practical system show that this improved is available.
Key wordsservo system;PI;trapezium acceleration and deceleration;position-velocity tracing algorithm
引用格式:李慶華.梯形加減速算法在伺服系統(tǒng)中的應用研究[J].無線電工程,2016,46(7):56-59.