基于北斗的高精度滑坡監測系統設計
2016-08-01 06:27:37楊開偉李娟娟
無線電工程 2016年7期
楊開偉,李娟娟
(1.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081;2.河北省衛星導航技術與裝備工程技術研究中心,河北 石家莊 050081)
?
基于北斗的高精度滑坡監測系統設計
楊開偉1,2,李娟娟1,2
(1.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081;2.河北省衛星導航技術與裝備工程技術研究中心,河北 石家莊 050081)
摘要為了實現高精度滑坡監測,對基于北斗的高精度滑坡監測系統進行了設計,介紹了系統的設備組成與工作原理,并根據工程經驗提出系統建設實施方案。在對高精度實時處理和靜態基線解算算法進行理論闡述的基礎上,通過軟件研發、原型系統搭建、測試試驗以及數據處理與分析等,對系統的功能與性能進行測試驗證。經試驗證明,基于北斗進行高精度滑坡監測可行,且其監測精度較高,完全滿足滑坡監測的需求。
關鍵詞北斗導航系統;高精度;RTK;基線解算;滑坡監測
0引言
滑坡災害輕則造成大量經濟損失,重則造成人民生命受到嚴重威脅,因此地質滑坡監測預警、滑坡防治工作已勢在必行。據國土資源部通報,每年全國發生的地質災害中,滑坡地質災害占60%~70%的比重,可見,滑坡是最主要的地質災害類型,在地質災害防治方面至關重要。
基于全球導航衛星系統(GNSS)技術的滑坡監測理論與方法,是當前廣泛采用的滑坡監測新方法、新技術之一。GNSS定位技術相比于傳統的測繪作業方法與模式有著顯著的特點和優越性,其優越的性能及廣泛的適用性,是常規測量作業難以比擬的。GNSS以其全天候、高精度、高效率和實時動態等優點,成為當今極為重要的監測手段之一。
如今,自主研制的北斗衛星導航系統已經正式運行并提供服務,北斗高精度接收機研制技術也取得很大發展。在這種背景下,北斗高精度定位技術在各個行業和領域的應用也得到了大大的擴展。在滑坡監測方面,北斗高精度監測也得到了一定的應用。
本文將根據滑坡監測的實際應用需求、監測模式以及精度要求,對高精度監測理論算法進行深入研究,研制實現實時和事后處理2種監測處理模式,并通過測試實驗對不同模式的算法進行驗證。
1系統組成與工作原理
1.1系統組成
基于北斗的高精度滑坡監測系統由數據采集子系統、數據通信子系統、數據處理子系統及輔助支持子系統組成。系統體系架構如圖1所示。
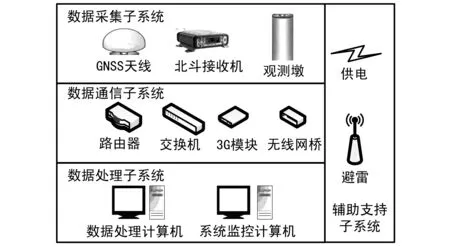
圖1 基于北斗的高精度滑坡監測系統架構
數據采集子系統主要實現北斗導航信號接收與觀測數據采集功能,包括GNSS天線、北斗接收機和觀測墩等設備。
數據通信子系統將采集的北斗觀測數據上報給數據處理子系統,同時將數據處理子系統的監控指令發送給北斗接收機。
數據處理子系統主要完成數據處理與系統監控功能。數據處理包括實時處理和事后處理2種方式:通過實時數據處理,得到cm級的滑坡監測結果,并自動進行系統監控;事后處理能夠得到mm級的滑坡監測結果。
輔助支持子系統主要包括供電、避雷等設備,滿足在野外惡劣條件下系統建設。
基于北斗的高精度滑坡監測系統的典型建設與實施如圖2所示。數據采集終端采用太陽能供電,并采取保護措施,建設在簡易觀測墩上;通信鏈路采用無線方式(3G或網橋等)實現數據通信[1];數據處理與監控系統安裝在室內,對數據進行處理分析與監控。

圖2 基于北斗的高精度滑坡監測系統建設實施
1.2工作原理
基于北斗的高精度滑坡監測系統的工作原理為:2臺高精度北斗接收機進行連續觀測采集北斗觀測數據,通過通信鏈路將觀測數據發送給數據處理子系統;數據處理子系統的數據處理軟件實時接收各個接收機采集上報的北斗高精度觀測數據,并根據配置好的處理模式和參數進行實時處理,生成實時監測結果,并發送給系統監控計算機;系統監控計算機實時顯示監測結果和系統運行狀態,將收到的監測處理結果進行判斷,如果結果異常則進行告警。
事后處理模式與實時處理模式類似,區別在于實時模式處理的是實時上報的觀測數據,而事后模式處理的是按照固定格式存儲的觀測數據文件。
2數據處理算法


(1)
在站間單差的基礎上再求星間單差,便得到雙差觀測值為[3]:

(2)

(3)

將式(3)代入雙差組合方程式(2)中,并顧及T1和T2兩測站同步觀測j和k兩顆衛星,在忽略大氣折射殘差影響的情況下,雙差觀測方程為[4]:

(4)
式中,
Δ▽Njk=ΔNk-ΔNj。
可以看出衛星鐘差和接收機鐘差也已經被消除,這是雙差模型的重要優點。
若取測站T1為已知參考點,則在雙差觀測方程中,除了測站T2的位置為待定參數之外,還包含有整周模糊度參數項Δ▽Njk。通常在構成雙差觀測時,除了取一個測站為參考點外,同時也要取一顆觀測衛星為參考星[5]。
如果要實現單歷元解算(或進行實時動態定位),則必須先解算出整周模糊度,這個過程就是RTK初始化過程。
2.1RTK解算
載波相位動態相對定位(RTK)的數學模型(雙差觀測方程)為[6]:

(5)
式中,

(6)
由于流動站的位置是不斷變化的,所以RTK一般采用一個歷元的觀測值。若以Nr和Ns表示包括參考站在內的測站總數和同步觀測的衛星數,則一個歷元的雙差觀測方程的未知數個數和觀測方程個數分別為[2]:
未知數個數=3(Nr-1)+(Ns-1)(Nr-1),
單歷元雙差觀測值數=(Ns-1)(Nr-1)。
可見,單歷元解算的條件無法滿足,由于整周模糊度在信號鎖定的情況下是保持不變的,一旦初始化完成,則在每個歷元就只有3(Nr-1)個未知數,則可解的條件變為:
(Ns-1)(Nr-1)≥3(Nr-1),
或
Ns≥4。
只要同步觀測的衛星數大于4顆,就可以進行RTK定位解算。定位過程中一旦發生失鎖,則要重新進行初始化。
2.2靜態基線解算
若兩測站同步觀測衛星為Sj和Sk,設Sj為參考衛星,則可得雙差觀測方程的線性化形式[7],即:
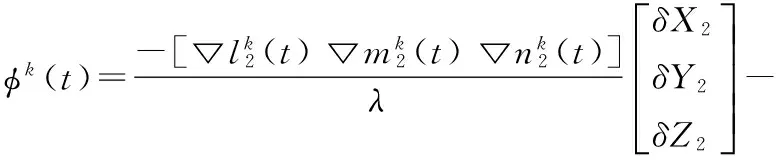

(7)
式中,
Δ▽φk(t)=▽φk(t)-▽φj(t),

Δ▽Nk=ΔNk-ΔNj。
令

(8)
則可改寫為如下誤差方程式的形式[8],即:

Δ▽Nk+Δ▽uk(t)。
(9)
當兩測站同步觀測的衛星數為ns時,可得誤差方程組如下[9],即:

(10)
式中,

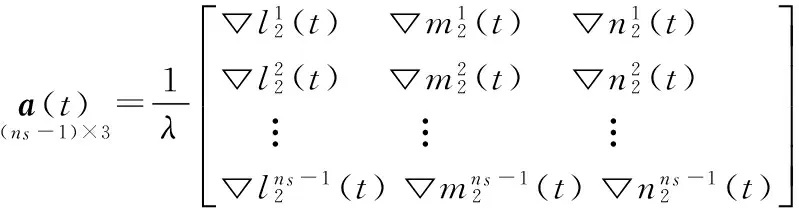
δX2=[δX2δY2δZ2]T,

如果在基線的兩端,對同一組衛星觀測的歷元數為nt,那么相應的誤差方程組由上式可得[10]:
(11)
式中,




相應的法方程及其解,可表示為[11]:
NΔY+W=0,
(12)
ΔY=-N-1W。
(13)
式中,

N=(AB)TP(AB),
W=(AB)TPL。
3測試結果分析
為了測試滑坡監測系統的功能與性能,使用北斗高精度接收機進行了大量的試驗,包括RTK實時動態測試與靜態基線測試,2組試驗均在事先高精度標定的基線場內進行。2臺北斗接收機分別架設在基準點觀測墩上,數據采樣率為1 s,基線長度為5.760 m,試驗持續時間為2 h。
3.1實時動態監測
將2臺北斗接收機采集的觀測數據導出,用高精度數據處理軟件進行RTK單歷元解算,解算結果如圖3和表1所示。
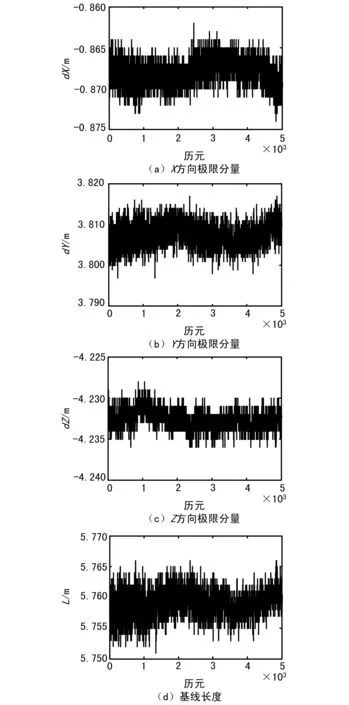
圖3 北斗動態RTK測試結果
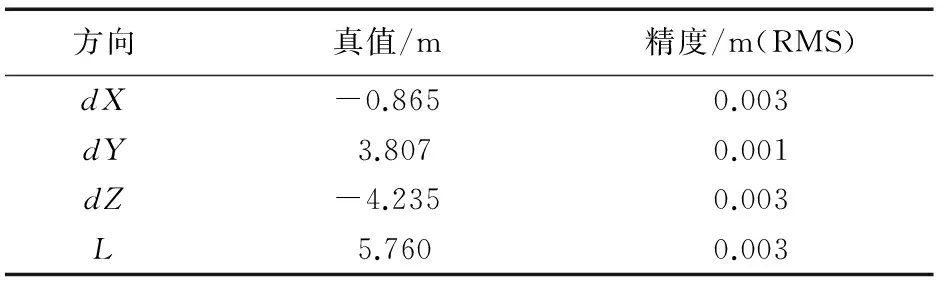
方向真值/m精度/m(RMS)dX-0.8650.003dY3.8070.001dZ-4.2350.003L5.7600.003
由圖3可知,用北斗滑坡監測系統進行實時處理監測,當基線為6 m左右時,其X、Y和Z三個方向的精度都達到mm級,基線長度監測精度也達到mm級。隨著基線長度的增加,當基線長度為2 km以上時,精度會有所下降,可能會達到cm級。
3.2事后處理監測
將2臺北斗接收機采集的觀測數據導出,用自研的高精度數據處理軟件進行靜態基線解算,解算結果如圖4所示。
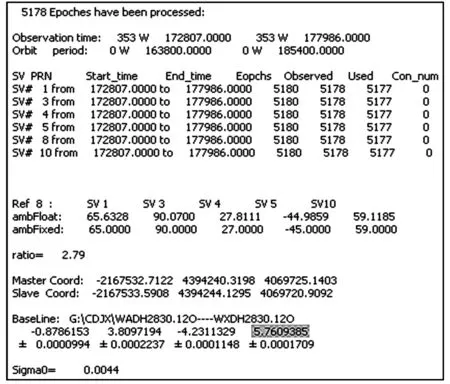
圖4 北斗靜態基線解算結果
由圖4可見,靜態基線后處理解算結果(5.760 9 m)與真值(5.760 m)相差0.000 9 m,絕對精度優于1 mm,其統計精度為0.000 170 9,達到亞毫米級。靜態基線后處理精度比實時RTK處理精度高,當基線長度較長時,可以采用實時監測處理和事后基線處理2種方式,以提高系統的可靠性和準確度。
3.3結論
通過系統原型搭建與試驗數據分析,可以得到以下結論:
① 用滑坡監測系統進行實時監測處理時,處理精度可以達到cm級(短基線)甚至mm級(超短基線);
② 利用事后靜態基線進行數據處理的方式,處理精度可以達到mm級甚至亞毫米級;
③ 實時處理模式精度比事后處理模式低一個量級,但是具有實時性好、監測內容直觀的優點;
④ 根據不同的監測環境可以選擇不同的處理模式(實時處理模式或事后處理模式),但采用2種模式相結合的模式能夠提高系統的可靠性和準確度。
4結束語
本文對基于北斗的高精度滑坡監測系統進行了設計,并結合工程實際給出了系統的建設實施方案。在對高精度數據處理算法進行理論闡述的基礎上研發出實時和事后高精度數據處理軟件,并分別進行不同的測試試驗對系統性能進行測試。由試驗數據及處理結果證明,本文提出的滑坡監測系統及其數據處理方法能夠有效對滑坡進行監測評估,并且可以根據實際情況選擇不同的處理模式,具有高精度、靈活性等特點。
參考文獻
[1]江華.北斗在移動通信中的應用技術研究[J].移動通信,2016,40(4):64-67.
[2]李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2011:162-168.
[3]黃丁發,熊永良,周樂韜,等.GPS衛星導航定位技術與方法[M].北京:科學出版社,2009:104-113.
[4]周忠謨,易杰軍.GPS衛星測量原理與應用[M].北京:測繪出版社,1992:109-145.
[5]冉典.GPS/BDS組合基線解算方法研究與軟件實現[D].安徽:安徽理工大學,2015.
[6]劉根友.高精度GPS定位及地殼形變分析若干問題的研究[D].北京:中國科學院研究生院(測量與地球物理研究所),2004:59-63.
[7]魏子卿,葛茂榮.GPS相對定位的數學模型[M].北京:測繪出版社,1998:119-129.
[8]崔希璋,於宗儔,陶本藻,等.廣義測量平差[M].武漢:武漢大學出版社,2012:31-64.
[9]過家春.GPS技術在橋梁變形監測中的應用研究[D].安徽:合肥工業大學,2010:40-53.
[10]李征航,張小紅.衛星導航定位新技術及高精度數據處理方法[M].武漢:武漢大學出版社,2009:119-129.
[11]元榮.BDS/GPS基線算法研究及軟件開發[D].北京:清華大學,2014:61-66.
doi:10.3969/j.issn.1003-3106.2016.07.10
收稿日期:2016-04-20
基金項目:國家國際科技合作專項基金資助項目(2013DFA10540);地理信息國家重點實驗室開放基金資助項目(SKLGIE2014-M-2-4)。
中圖分類號TP391.4
文獻標志碼A
文章編號1003-3106(2016)07-0038-04
作者簡介
楊開偉男,(1984—),碩士,工程師。主要研究方向:衛星導航數據處理。
李娟娟女,(1984—),碩士,工程師。主要研究方向:衛星導航數據處理。
High Precision Landslide Monitoring System Based on BDS
YANG Kai-wei1,2,LI Juan-juan1,2
(1.StateKeyLaboratoryofSatelliteNavigationSystemandEquipmentTechnology,ShijiazhuangHebei050081,China2.SatelliteNavigationTechnologyandEquipmentEngineeringTechnologyResearchCenterofHebeiProvince,ShijiazhuangHebei050081,China;)
AbstractFor high precision landslide monitoring,a high precision landslide monitoring system based on BDS is designed,and its equipment composition and operation principle are introduced.The construction project is put forward according to engineering experience.The high precision real-time processing and static baseline resolution algorithm are described theoretically,based on which,the function and performance of the system are validated through software development,prototype system integration,test & experiment and data processing.Experiments have proved the feasibility of using BDS for high precision landslide monitoring,and the precision completely meets the requirements of landslide monitoring.
Key wordsBDS navigation system;high precision;RTK;baseline resolution;landslide monitoring
引用格式:楊開偉,李娟娟.基于北斗的高精度滑坡監測系統設計[J].無線電工程,2016,46(7):38-41,55.