基于多元自感知的車輛智能服務系統設計
2016-07-29 11:54:13楊博陳新袁建輝張建生孫兵曉
物聯網技術 2016年7期
關鍵詞:模塊化
楊博 陳新 袁建輝 張建生 孫兵曉
摘 要:針對車輛日常使用、維護等需要,基于多元自感知融合技術,設計了一種車聯網應用系統。本系統具備三大功能:多元自感知,即綜合運用OBDII、聲音采集、輪胎監測、3D監測、組合定位等技術,實時監測車輛機電狀態、位姿等信息;V2X通信,即通過DSRC、蜂窩網等無線互聯技術,實現車-車、車-云等的實時通信與交互;智能服務,即通過對自感知數據的融合和處理,并結合V2X通信產生智能輔助駕駛、遠程監控等多種應用。文中具體闡述了關鍵技術和實現方法,并采用模塊化設計思想,使其具有功能豐富、集成度高、可實現性強的特點。
關鍵詞:車聯網;遠程監控;模塊化;集成
中圖分類號:TP24 文獻標識碼:A 文章編號:2095-1302(2016)07-00-04
0 引 言
車輛是當今社會不可或缺的交通工具,與日俱增的車輛也帶來了日益突出的道路擁堵、事故多發、能源浪費、空氣污染等問題。隨著互聯網、物聯網等技術的發展,車聯網(Internet of Vehicles,IoV)技術應運而生,它綜合應用智慧傳感、通信網絡、嵌入式等技術,對車況和道路交通信息進行全面感知和處理,實現人與車、車與云、車與車等多維交互,使車輛和交通管理愈發智能,車聯網成為解決上述問題的有效途徑[1]。在車聯網時代,車輛被賦予了新的DNA,破除了信息孤島的弊端,車輛的移動互聯使之具備智能多樣的社交和安全功能[2]。人們對汽車的要求已不再局限于可靠性與操控性,對行車安全和車況的關注不斷加強,渴望在行車中通過便攜的智能終端設備(手機、平板電腦等)隨時隨地實時監測車輛狀況,并享受各種智能化服務;而車輛管理部門也希望對所屬車輛進行遠程管控、指揮調度,并為駕駛者提供必要的信息支持。
本文遵循“管-云-端”的車聯網架構[3],設計了基于多元自感知的車輛智能服務系統,它通過車載傳感器網絡智能感知汽車自身狀態,對感知數據進行多維融合、分析計算與綜合呈現,最終為駕駛者提供多樣化的智能服務。在實現同樣功能的條件下,相比使用機器視覺、微波雷達等外部感知技術,本系統具有原理簡單、易于實現、成本低廉等優勢,并可通過V2X交互實現功能的拓展。
1 功能分析
著眼于對車輛自身狀態的全面感知,讓車輛變得更加安全、便捷和智能,經過深入調研,認為系統應具備多元自感知、V2X交互、智能服務的功能。
1.1 多元自感知
系統能夠實時全面感知車輛自身的狀態。
(1)實時感知車輛本體實時狀態,包括車輛本身的速度、里程、胎壓等狀態,以及車輛電控系統、機械系統各種參數。
(2)實時感知特殊載荷實時狀態,即車載專用儀器、設備的運行、故障等狀態。
(3)實時感知位姿信息。全時記錄車輛的位置、航向等,生成和記錄行車軌跡,并分段顯示,進行遠程實時跟蹤等。
1.2 V2X交互
系統具備多維交互功能,利用網絡獲取各種信息。
(1)V2I(Vehicle-to-Internet,車-云):車輛能夠隨時隨地接入互聯網,享受云端豐富資源。
(2)V2V(Vehicle-to-Vehicle,車-車):實現車與車之間交互各自狀態、位置、緊急安全信息等。
(3)V2P (Vehicle-to-Person,車-人):先進的人機工程設計,豐富的人機交互界面,以及通過個人手持終端與車輛的智能互聯。
1.3 智能服務
基于多元自感知與無線互聯實現豐富應用。
(1)故障維修:保養提醒,故障診斷評估,維修點引導,現場及遠程輔助維修等。
(2)自主引導:油量短缺時自主尋找加油站,需停車時自主尋找停車位等。
(3)輔助駕駛:超速提醒,疲勞駕駛提醒,交通狀況提醒等。
(4)安全預警:實時測量周邊車輛距離,以防止發生碰撞事故,獲取緊急安全信息。
(5)智能防盜:非法動用車輛告警,定位跟蹤。
(6)緊急救援:發生碰撞等交通事故自動報警,與交通部門、保險公司、4S店等對接。
2 系統設計
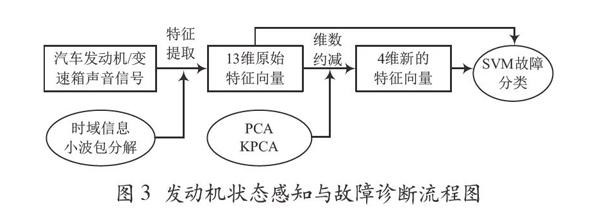
本文設計了一種基于“管-云-端”結構的車聯網應用系統[4],整體架構如圖1所示。
2.1 管系統
“管系統”是車輛信息采集、處理、存儲、顯示與通信的平臺。可實時感知電控系統、機械本體、輪胎、位姿、特殊載荷等狀態信息。對感知數據進行綜合分析和計算,為駕駛者提供車況顯示、報警提醒、故障診斷、本地或遠程輔助維修、導航定位、加油或停車導引等智能化服務,并通過連接泛在網絡進行功能拓展,能與云平臺進行信息交互、資源完善、應用更新等。
2.2 云系統
“云系統”是綜合數據管理與服務中心,可實現車聯網業務和數據的全面互聯互通,匯聚并管理車輛、智能終端等信息。
2.3 端系統
“端系統”是智能移動終端或PC客戶端,用戶可通過App實時監控車輛,或發起各種服務請求。可以連接車載終端共享信息,也可接入互聯網遠程發送操作指令到“云”平臺,并從云平臺獲取相應信息展現給用戶,用戶通過智能移動終端App實現對車輛的遠程實時監控,或接受車輛管理等服務。PC客戶端面向企業等機構或個人,實現對車輛的遠程管控與調度。
3 關鍵技術與實現方法
3.1 智能感知模塊
該模塊全面感知自身信息,具備黑匣子的功能[5],同時為智能服務提供信息基礎。
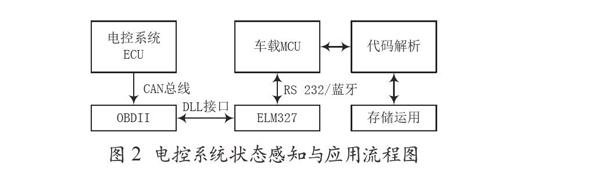
3.1.1 電控系統狀態感知
電控系統狀態可基于OBD技術實現,OBDII監測模塊可選用成熟產品,如ELM327。該模塊支持所有OBD-II協議(ISO15765-4(CAN)、ISO14230-4(KWP2000)等),可讀取引擎每分轉數、冷卻液溫度、車速、短期燃料情況、長期燃料情況等數據,以及故障代碼(擁有超過3 000個通用代碼定義)、清除錯誤碼并滅MIL等。電控系統狀態感知與應用流程圖如圖2所示。
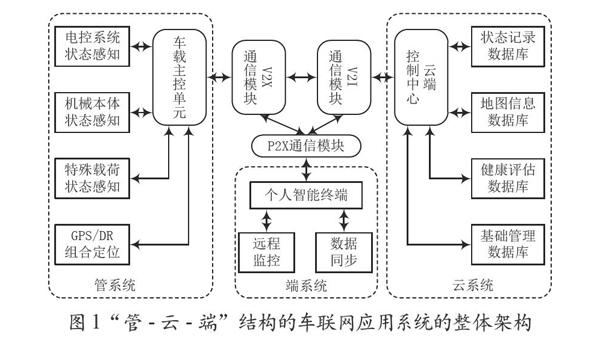
3.1.2 機械本體狀態感知
機械本體主要由發動機、變速箱、底盤以及車身等組成,其中發動機是車輛的心臟,40%以上的車輛故障源自發動機,所以目前對機械本體的感知主要通過采集發動機等核心部件的聲音,借助小波包分析、SVM神經網絡等算法實現故障識別[6],發動機狀態感知與故障診斷流程如圖3所示。其中,聲音采集模塊可選用音頻CODEC芯片UDA1341實現。
3.1.3 輪胎狀態感知
輪胎的溫度、壓力可經溫度和壓力傳感器采集后,通過無線發射模塊傳遞給車載終端得到。胎壓、胎溫采集模塊可采用成熟的成品模塊,這些模塊一般內置加速度傳感器,當檢測到車輛運動時自動喚醒。無線射頻收發可采用MICRF112/MICRF211發射/接收芯片[7]實現。而車輛載重可根據Hell公式得到:
M=2.265ZKpt0.585(B+d)B1.39/g (1)
式中,M為車輛載重(kg);Z為輪胎行駛條件因數;K為輪胎類型因數;B為裝配輪輞后的充氣輪胎斷面寬度;d為輪輞直徑(m);pt為輪胎內壓(Pa);g為重力加速度,通常取值9.8 N/kg。
但式(1)只是一個粗略的計算公式,對貨車而言,其需要較為精確的載重數值,因此要考慮輪胎變形等因素以對(1)式進行改進[8],該方法具有不需要額外添加硬件的優點。對于安裝板簧懸架的貨車,可采用粘貼式應變傳感器進行載重監測,以得到更加準確和穩定的結果。
3.1.4 位姿狀態感知
(1)基于GPS/DR的組合導航定位
目前,大量智能化服務都要基于位置實現,車聯網產品也不例外。現有設備多單一使用GPS定位,雖然能滿足大部分需要,但無法滿足與安全有關的應用,如車距測量與防碰撞需要更加精確的位置和航向數據,因此本文提出采用GPS/DR(里程計)的復合式定位技術,即使在暫時失去GPS信號情況下也能推算出自身位置,采用分散式濾波算法,可大大提高計算效率和容錯能力。該功能可通過選用OEM4-G2 GPS接收機和車輛自帶的里程計實現。
(2)3D監測
采用三軸加速度傳感器采集振動或碰撞信號。該功能可由MMA7455加速度傳感器實現[9]。
3.1.5 其它狀態感知
其它狀態感知主要針對車輛特殊載荷感知,通常用于專用或特種車輛,如車載電站、車載基站等。可通過接入其總線(CAN等)的方式按照一定規則提取。
3.2 V2X通信模塊
車輛只有與外界廣泛的通信互聯,才能獲取更豐富的信息和服務。
(1)V2I通信:車輛連接互聯網最為有效、可靠的手段是3G/LTE技術;WAVE/DSRC是專門針對車輛的移動性而設計的車聯網接入技術;WiFi技術多在車輛靜態下接入互聯網[9]。
(2)V2V通信:WAVE/DSRC是專門用于組建車輛自組織網絡的接入技術;RFID技術也被用于V2V通信中[10]。
(3)V2P交互:主要是指車輛與個人移動終端的通信,較為普及和經濟有效的通信方式是藍牙技術,也可通過USB等有線方式互聯。
3.3 車載主控模塊
車載智能終端是基于ARM的嵌入式系統。硬件部分包括MCU、外置Flash、SDRAM和外圍時鐘電路等,可采用芯片的型號很多,如三星公司的S3C6410,該芯片性能高、功耗低、可擴展性強[6]。選用Android作為主控模塊的操作系統,Android具有開放性、方便開發的特點,可根據所需自由安裝各種軟件App。
3.4 智能服務設計
車載終端的軟件部分基于Android系統進行開發,包括數據庫、服務器和應用程序。嵌入式數據庫存儲車輛的各種狀態數據,可供隨時調閱。嵌入式服務器為自身、個人終端、其他車輛、云端訪問提供服務。智能服務應用程序對融合和運用感知到的各類狀態數據進行設計,除系統管理與設置等基本功能外,主要包括以下功能模塊:
(1)狀態監測與數據存儲:自感知的信號經過處理形成可用數據后,一方面實時顯示車況,如車速、瞬時油耗、水溫、油量等,并作為判定異常的依據;另一方面,實時存儲能夠統計分析和生成報表,供用戶調閱。
(2)故障診斷與自主引導:及時發現異常狀態數據,采用本地和遠程相結合的方式,運用專家系統/神經網絡/模糊識別等方法進行故障診斷,給予維修指導,自動評估就近維修/4S服務站點并進行引導(也可根據駕乘人員輸入的指令提供所需導航),工作流程如圖4所示。
(3)智能安全駕駛協助:實時分析自感知數據的異常,如胎壓過高、超載、油耗過大等,及時提醒。由 GPS定位確定所屬路段(城市、郊區、彎道、上下坡等),分析應有速度范圍,進行速度提示,結合轉速變化提醒加減油門和換擋等。根據駕駛時間和行駛穩定性判斷是否為疲勞駕駛并提醒。根據GPS定位和V2V通信進行測距、防碰撞預警。通過V2X通信實時推送交通事故、擁堵、險情等信息,工作流程如圖5所示。
(4)防盜報警與緊急救援:停車期間,通過3D傳感器檢測異常振動判斷車輛是否被盜或遭襲,并及時通知車主;在被盜后也可通過GPS實時跟蹤車輛;行駛中,依據3D狀態、安全氣囊狀態判定碰撞事故或接受駕乘人員指令信息,在事故后第一時間通知家人、醫院、交管部門、4S店等,工作流程如圖6所示。
(5)資源更新與數據同步:與云系統、端系統保持數據同步和及時資源更新;手持終端可以通過USB數據線或藍牙將手機桌面映射到智能終端等,以享受更多應用。
此外,由于本系統具有V2X聯網通信功能,并基于安卓進行開發,可靈活支持多樣的社交和娛樂App,如音視頻通信、網絡電話、導航定位及相關服務等,可讓用戶暢享豐富的互聯網資源。
3.5 云端管控中心
“云系統”核心硬件包括計算、存儲、網絡通信等設備。軟件采用模塊化分層設計,分為數據層(主要包括基礎管理、狀態數據、地理信息、健康評估等數據庫)、中間層、表示層。主要完成車輛數據采集、計算與存儲,進行網絡資源集成,并為車載終端和智能移動終端提供交通信息發布、遠程監控、維修協助、應用更新、資源下載等綜合服務。監控GUI程序可用C#編寫,數據庫采用Oracle11.0進行設計,并遵循統一的標準規范[11]。
3.6 個人智能終端
個人智能終端App主要基于Android移動操作系統開發,采用模塊化設計和面向對象程序設計語言,分為界面層、功能層和數據層。當用戶在車上時可與車載終端直連,分享車載終端所有功能,智能移動終端還可作為車載終端功能的彌補,如車輛發生故障需就地檢修時,可利用智能移動終端的3G/4G無線通信功能與維修中心專家進行音視頻通信,有效協助用戶進行車輛維修。當用戶不在車上且需要遠程監控時,客戶端遠程發送操作指令到云服務平臺,并從云服務平臺遠程獲取響應信息展現給用戶,用戶通過手機App實現對車輛的遠程實時監控及實時儀表盤查看,或者享受汽車4S店、車輛管理、車友互動等服務。
PC客戶端采用Windows操作系統,基于C/S架構進行軟件設計,平臺開發軟件可采用上海寶信軟件股份有限公司研發的一體化監控指揮平臺(iCentroView),它以“地理”信息綜合數據和電子地圖為基礎,在覆蓋范圍內,利用各種檢測手段采集所有數據信息,并存入統一的數據庫內。該平臺軟件可以有效集成車況綜合監測和智能服務的各種功能[12]。
4 設計方案分析
本文設計了一套較為完整的車聯網實現方案,該方案主要考慮了如何基于車輛自身狀態的全面感知和通信互聯實現智能、多樣的服務,在實現同樣功能的條件下,該方案相比采用機器視覺、微波/毫米波雷達等外部感知技術,具有原理簡單、易于實現、成本低廉等優點。此外,采用模塊化的設計思想,部分軟硬件模塊可以直接采購或定制(一些功能已得到實現驗證或應用),從而大大提高了研發效率。隨著通信網絡技術的飛速發展,制約車聯網發展的“鏈路”瓶頸正逐步被突破。更重要的是,汽車市場的繁榮加速驅動著IoV技術不斷創新變革,相信本文提出的設計思路將很快得到實現和普及。
5 結 語
本文設計了一種基于多元自感知的車輛智能服務系統,具有一定可行性和參考價值。雖然所用技術已相對成熟,但方案不等同于實際,在集成開發和測試中勢必會出現一些問題,下一步,筆者將在試驗中對方案進行驗證和改進。
參考文獻
[1]王群,錢煥延.車聯網體系結構及感知層關鍵技術研究[J].電信科學,2012(12):1-9.
[2]米歇爾.“未來車”世紀[M].田娟,譯.北京:中國人民大學出版社,2010:1-10.
[3]藺宏良,黃曉鵬.車聯網技術研究綜述[J].機電工程,2014,31(9): 1235-1238.
[4]崔正杰,劉南杰,趙海濤.基于管-云-端結構的汽車遠程實時監控系統設計[J].微型機與應用,2014 ,33(24):91-94.
[5]陳小兵.多功能車載黑匣子的研究與實現[D].石家莊:石家莊鐵道大學,2014.
[6]李敏,董志學.基于Android的嵌入式機器聲音故障檢測系統的設計與實現[J].計算機應用與軟件,2013,30(7):301-304.
[7]鐘一鳴.車輛信息采集系統設計[D].杭州:杭州電子科技大學,2014.
[8]張興輝,張維杰.基于加速度的車禍報警系統設計與實現[J]. 現代電子技術,2012,35(17):163-165.
[9] Yang Fangchun, Wang Shangguang,Li Jinglin,et al.An Overview of Internet of Vehicles[J].Wireless Communication over ZigBee for automotive inclination measurement China communications, 2014,11(10):1-15.
[10]陳偉.車輛碰撞預警系統研究[D].蘇州:蘇州大學,2012.
[11]岳現杰.基于無線網絡的車輛健康狀態管理系統研究[J].計算機測量與控制,2012 ,20(2):297-299.
[12]張之瑜,董文生,范昀,等.一體化監控指揮平臺研究[J].信息技術與標準化,2014(3):64-66.
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05
