基于無(wú)線通信模塊的兩智能車路口交匯系統(tǒng)的研究與實(shí)現(xiàn)
2016-07-26 10:01:44閆寬寬凡慶張維君
汽車實(shí)用技術(shù) 2016年6期
閆寬寬,凡慶,張維君
(1.長(zhǎng)安大學(xué)汽車學(xué)院,陜西 西安 710064;2.空軍航空大學(xué)飛動(dòng)系,吉林 長(zhǎng)春130000)
?
基于無(wú)線通信模塊的兩智能車路口交匯系統(tǒng)的研究與實(shí)現(xiàn)
閆寬寬1,凡慶1,張維君2
(1.長(zhǎng)安大學(xué)汽車學(xué)院,陜西 西安 710064;2.空軍航空大學(xué)飛動(dòng)系,吉林 長(zhǎng)春130000)
介紹了兩智能車十字路口交匯自動(dòng)避讓的系統(tǒng)設(shè)計(jì),研究了采用apc220無(wú)線模塊來實(shí)現(xiàn)兩車信息交互的軟硬件設(shè)計(jì)方法。該系統(tǒng)采用arduino微控制器的Uno控制板為核心控制器,利用紅外模塊獲得路徑信息從而達(dá)到小車循跡行駛的目的,同時(shí)利用碼盤測(cè)速方法測(cè)得小車行駛速度。最后根據(jù)各傳感器采集回來的數(shù)據(jù)利用積分算法與邏輯計(jì)算從而實(shí)現(xiàn)小車智能通過十字路口。
arduino;apc220;十字路口;積分算法
10.16638/j.cnki.1671-7988.2016.06.035
CLC NO.: U491.2 Document Code: A Article ID: 1671-7988 (2016)06-100-03
引言
隨著社會(huì)與技術(shù)的進(jìn)步,在IT技術(shù)、通信技術(shù)的推動(dòng)下智能交通系統(tǒng)的研究對(duì)象已經(jīng)從傳統(tǒng)的人-車-路發(fā)展成為智能道路-智能車輛和所有交通參與者作為對(duì)象。在面對(duì)交通問題時(shí),完全割裂交通系統(tǒng)中的各個(gè)要素已出現(xiàn)弊端,因此充分考慮車路信息的協(xié)調(diào),從智能車路系統(tǒng)的角度探尋交通系統(tǒng)運(yùn)行規(guī)律已成為國(guó)內(nèi)外研究的熱點(diǎn)和重點(diǎn)。本文介紹的智能車系統(tǒng)為智能交通的簡(jiǎn)單模型。首先小車紅外模塊探測(cè)到軌道上黑線,能夠在特定區(qū)域循跡行駛。同時(shí)根據(jù)碼盤測(cè)得速度計(jì)算小車距交叉路口距離,兩小車信息交互確認(rèn)安全后即可通過。若有碰撞可能,其中一方應(yīng)停下等待從而保證兩車安全通過路口。本文假設(shè)兩車正面交匯時(shí)各自靠右行駛不會(huì)發(fā)生碰撞問題,所以這里不討論這種類型的交匯。
1、智能車系統(tǒng)的硬件設(shè)計(jì)
如圖1所示,系統(tǒng)主要有五部分組成:

圖1
1.1單片機(jī)控制芯片
arduino板是一個(gè)以 AVR 單片機(jī)為核心的開源硬件平臺(tái),提供的核心硬件資源是一個(gè)基于 8-bit 的 AVR 單片機(jī)ATmega328 微控制器。開發(fā)板包括32個(gè)I/O接口,其中有14道數(shù)字 I/O 接口(D0-13):可作為輸入或輸出。其中數(shù)字端口的(D3,5,6,9,10,11)可以編程為 6個(gè)模擬 PWM 輸出端口。6個(gè)模擬輸入端口(A0-5):輸入比如傳感器電壓這類模擬信號(hào),可通過內(nèi)部 ADC將其轉(zhuǎn)換為數(shù)字信號(hào)。板子可以對(duì)外提供3.3V或者5V電壓接口。
1.2APC220-43無(wú)線通信模塊
APC220-43模塊是高度集成半雙工微功率無(wú)線數(shù)據(jù)傳輸模塊,其嵌入高速單片機(jī)和高性能射頻芯片ADF7020-1。創(chuàng)新的采用高效的循環(huán)交織糾檢錯(cuò)編碼,抗干擾性和靈敏度都大大提高,最大可以發(fā)現(xiàn)24bits連續(xù)突發(fā)錯(cuò)誤,達(dá)到業(yè)內(nèi)的領(lǐng)先水平。APC220-43模塊提供了多個(gè)頻道的選擇,可以在線修改串口速率,發(fā)射功率,射頻速率等各種參數(shù)。
APC220-43模塊能夠透明傳輸任何大小的數(shù)據(jù),而用戶無(wú)須編寫復(fù)雜的設(shè)置與傳輸程序,同時(shí),小體積寬電壓運(yùn)行,較遠(yuǎn)傳輸距離,豐富便捷的軟件編程設(shè)置功能,使之能夠應(yīng)用與非常廣泛的領(lǐng)域。圖2為該模塊與單片機(jī)接線圖。
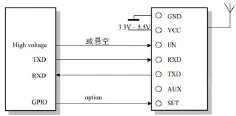
圖2
1.3速度檢測(cè)模塊
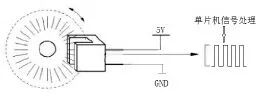
圖3
該系統(tǒng)中使用單信號(hào)線光電測(cè)速傳感器H206,其工作原理較簡(jiǎn)單如下圖3,該測(cè)速裝置有三根引腳電源線接5v電源信號(hào)線接單片機(jī)端口。U型管裝有一對(duì)紅外對(duì)射管,當(dāng)裝在車輪上的碼盤轉(zhuǎn)動(dòng)時(shí),該傳感器會(huì)產(chǎn)生如圖中方波,然后利用單片機(jī)中斷函數(shù)監(jiān)測(cè)到該信號(hào)中脈沖數(shù)從而可以計(jì)算得到當(dāng)前車輪轉(zhuǎn)速,最后根據(jù)車輪周長(zhǎng)可以測(cè)出目前車速。
1.4紅外探測(cè)模塊
此模塊使用億光 5MM 紅外對(duì)管,其中紅外接收管PT334-6B,紅外發(fā)射管IR333-A等分立元器件組成探頭,在探測(cè)過程中,發(fā)射端發(fā)射的紅外光被反射回來并被接受管接收到。而接受管它是一個(gè)具有光敏特征的PN結(jié),屬于光敏三極管,具有單向?qū)щ娦裕虼斯ぷ鲿r(shí)需加上反向電壓。無(wú)光照時(shí),有很小的飽和反向漏電流,此時(shí)光敏管不導(dǎo)通。當(dāng)光照時(shí),飽和反向漏電流馬上增加,形成光電流,在一定的范圍內(nèi)它隨入射光強(qiáng)度的變化而增大。此對(duì)管使用LM339電壓比較器獲得輸出信號(hào),比較器之后加入一級(jí)遲滯電路,使輸出信號(hào)更加干凈,適合單片機(jī)的使用。該模塊電路如圖4所示。

圖4
1.5電機(jī)驅(qū)動(dòng)模塊
L298N是一款直流電機(jī)驅(qū)動(dòng)芯片,可以同時(shí)驅(qū)動(dòng)兩個(gè)電機(jī),允許電壓范圍3.6V~4.5V,內(nèi)有四重推挽驅(qū)動(dòng)電路,可以提供 1A的驅(qū)動(dòng)電流。并且如果芯片過熱,芯片能夠自動(dòng)關(guān)斷,保障系統(tǒng)不受損壞。引腳A,B可用于PWM控制電機(jī)的轉(zhuǎn)速。而IN1,IN2和IN3,IN4兩對(duì)引腳通過改變接高低電平順序,可實(shí)現(xiàn)電機(jī)正反轉(zhuǎn)。
2、軟件設(shè)計(jì)
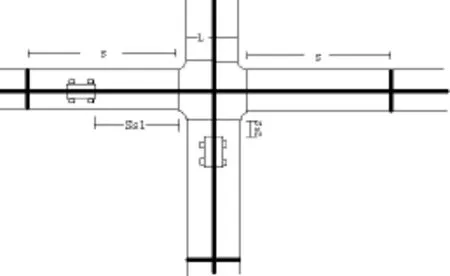
圖5
如圖5所示小車前部裝有3對(duì)紅外探測(cè)模塊根據(jù)該模塊檢測(cè)到的信息可以判斷小車當(dāng)前行駛姿態(tài),調(diào)整舵機(jī)轉(zhuǎn)向從而保持小車始終沿著軌道黑線行駛即完成了智能車的循跡行駛。當(dāng)三個(gè)紅外探測(cè)模塊同時(shí)檢測(cè)到黑線時(shí),說明小車進(jìn)入十字路口區(qū)域,此后便以小車0.5s末的速度作為小車0.5s的平均行駛速度,進(jìn)行計(jì)算小車在路口區(qū)域行駛的路程。當(dāng)小車進(jìn)入路口區(qū)域的同時(shí)通過無(wú)線模塊發(fā)送信號(hào),若另一小車收到信號(hào)時(shí)也已進(jìn)入十字路口,則進(jìn)行計(jì)算是否有在路口相撞的可能,若有可能相撞,則后進(jìn)入小車停車避讓;若無(wú)則兩車保持原速度駛過十字路口。兩智能車的控制系統(tǒng)的軟件設(shè)計(jì)基于arduino1.6.1編程環(huán)境,使用C語(yǔ)言實(shí)現(xiàn)。圖6為控制系統(tǒng)軟件流程圖。
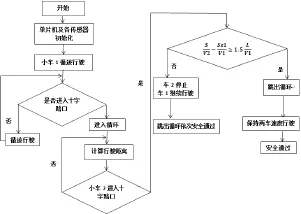
圖6 控制系統(tǒng)軟件流程
3、結(jié)束語(yǔ)
本文在循跡智能車的基礎(chǔ)上提出了一種基于無(wú)線通訊技術(shù)兩車智能通過十字路口的簡(jiǎn)單方案。在實(shí)際的測(cè)試中,小車能夠無(wú)碰撞的通過十字路口。但是當(dāng)小車速度過快時(shí),系統(tǒng)處理速度慢,可能會(huì)導(dǎo)致小車相撞。總之當(dāng)小車速度保持在一定范圍內(nèi)時(shí),該系統(tǒng)可以完成對(duì)小車的控制,使其按著預(yù)想的模式行駛。
[1] 顏利彪,范蟠果.基于單片機(jī)的簡(jiǎn)易智能電動(dòng)車[J].電子技術(shù),2004 (4):8-10.
[2] 高月華.基于紅外光電傳感器的智能車自動(dòng)尋跡系統(tǒng)設(shè)計(jì)[J].半導(dǎo)體光電,2009(30):135-145.
[3] 楊繼志,郭敬.Arduino 的互動(dòng)產(chǎn)品平臺(tái)創(chuàng)新設(shè)計(jì)[J].單片機(jī)與嵌入式系統(tǒng)應(yīng)用,2012,12(4):39-41.
[4] 安徽工程大學(xué).一種面向路徑識(shí)的遠(yuǎn)程遙控智能車:中國(guó),201120478840.0[P].2012 -08-15.
[5] 史其信,熊輝.展望 21世紀(jì)智能交通系統(tǒng)的發(fā)展[J].黑龍江工程學(xué)院學(xué)報(bào),2001,15(l):52-6.
[6] 王卓.第三屆全國(guó)大學(xué)生交通科技大賽作品—城市信號(hào)控制交叉口主動(dòng)安全系統(tǒng)設(shè)計(jì)[C],2008,12-24.
[7]吳建平,殷戰(zhàn)國(guó).紅外反射式傳感器再自主式尋跡小車導(dǎo)航中的應(yīng)用[J].中國(guó)測(cè)試技術(shù),2004,30(6):21-23.
Two intelligent vehicle crossing intersection based on wireless communication module research and implementation of the system
Yan Kuankuan1, Fan Qing1, Zhang Weijun2
(1.Chang'an UniversitySchool OF Automobile Shaanxi Xi'an 710064; 2.Aviation University Air ForceInstitute of aircraft and engine, Jilin Changchun130000)
a design of two smart car crossing intersection automatic collision avoidance system is introduced.apc220 wireless module is used to realize both software and hardware design method of interactive information. The system uses the arduino uno panel micro controller as the core controller, using infrared module path information so as to achieve the purpose of driving the car tracking, at the same time using encoder speed measuring method to measure the car speeds. Finally according to each sensor collected data using the integral algorithm and a certain logic control to realize intelligent car through the intersection.
arduino; apc220; the crossroads; Integral algorithm
閆寬寬,就讀于長(zhǎng)安大學(xué)。
U491.2
A
1671-7988 (2016)06-100-03
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32