淺談場橋大車糾偏優化措施
2016-07-25 02:16:05陳長潤晉江太平洋港口發展有限公司福建泉州362000
中國新技術新產品 2016年11期
陳長潤(晉江太平洋港口發展有限公司,福建 泉州 362000)
?
淺談場橋大車糾偏優化措施
陳長潤
(晉江太平洋港口發展有限公司,福建 泉州 362000)
摘 要:在場橋操作事故中,因大車糾偏問題引發的事故屢見不鮮,司機在操作大車行走時出現跑偏、糾偏不力是時有發生的現象,稍不留神即可能出現刮箱、撞箱事故,存在較大的安全隱患。本文從場橋大車行走軌跡發生偏離的原因入手,闡述并分析了大車糾偏中存在的常見問題,介紹大車糾偏的原理和方法,提出了一種新的經濟型的改進措施。
關鍵詞:場橋;大車;撞箱;糾偏
輪胎式起重機是一種場內裝卸機械,具有機動靈活可轉場作業的優點,是碼頭堆場作業的主力機械。為提高場地利用率,輪胎吊大車兩側下橫梁距集裝箱的安全距離不宜太大,需要依靠操作司機的工作經驗,目測距離,判斷是否需要糾偏并手動控制糾偏手柄的方向,達到保持安全距離的目的,這需要司機在操作中要時刻集中精力,提前預判,把握好糾偏時機、方向和持續時間,否則將會出現刮箱或撞箱事故。
一、大車糾偏常見的主要問題
場橋大車驅動裝置主要有兩驅和四驅兩種驅動方式,呈對角或四角布置。場橋在行駛過程中由于大車兩邊速度不一樣,會持續偏離軌道,需要機手在聯動臺不斷地手動糾偏,保持輪胎沿軌道中心線行走。在作業過程中,常見的大車糾偏問題有:
1 糾偏不力,糾不正;
2 糾偏系統不靈敏,響應慢,存在延時現象;
3 中速時糾偏效果好,全速或慢速時效果差;
4 頻繁糾偏,糾偏手柄易壞。
二、大車運行軌跡產生偏離的原因
那么,為什么系統給定同樣的速度大車行走時會跑偏呢?這需要從大車驅動裝置的結構入手,分析其中的速度變化。以兩輪驅動的場橋為例,大車驅動裝置由帶編碼器的電機、減速箱、大車鏈條、大鏈輪、小鏈輪、輪胎組成,當程序輸出同樣的電機轉速時,經過減速箱傳動和鏈輪傳動后,兩邊的輪胎轉速是一樣的,這時,如果兩邊輪胎的輪徑R(注:本文輪徑均指輪胎受壓后輪軸中心離地高度)一樣的話,大車兩邊的速度也會一樣。但是,由于受到輪胎胎壓、輪胎磨損程度、輪胎承受荷載不同的影響,兩邊輪胎輪徑R往往不一樣,一大一小,當以同樣的轉速轉動時,必然就產生了速度差,相當于一個轉大圈,一個轉小圈,導致大車無法直線行走,速度快的一側繞著另一側偏轉。
三、大車常規行走、糾偏方式及不足之處
1 大車正常行走模式,程序給定的兩臺大車電機轉速是相同的,但因兩個主動輪的輪徑R不一樣,大車兩邊存在速度差,由于圓周線速度等于角速度乘以半徑,因此速度差與輪徑差成正比,輪徑差越大,速度差越大,而速度差越大,大車自然偏轉得越快。
2 大車在糾偏模式時,速度慢的一側電機轉速增加20%,速度快的電機轉速減小20%,前者轉速是后者的1.5倍。但當電機以最快速度或最慢速度運行時,由于電機的限速作用,防止電機超速運行,糾偏后轉速比例僅有1.25倍。如中速時速度值為1000,糾偏后一個1200,一個800,比率1.5倍;全速2000糾偏后一個電機仍為2000,另一個1600,比率1.25倍。就會出現中速時糾偏效果好,全速或低速時糾偏效果差的現象。
3 輪徑差使得大車兩邊速度一快一慢,大車糾偏后快的變慢,慢的變快,但由于輪徑差的抵消作用,大車的糾偏效果受到了影響。在個別工況中當輪徑差大到一定程度,糾偏動作仍不足以改變兩電機的速度大小時,就會出現糾偏不力、糾不過來的情形。
4 響應速度慢,糾偏后一定時間內大車仍繼續朝原偏離方向前進。還是因為輪徑差的因素,導致大車兩側的速度存在偏差△V,在糾偏中目標速度并不是瞬間到達,必須要有一個加減速過程,△V從某一速度偏差值到零再到反向目標值的過程,需要一定的加減速時間。當按下糾偏后,△V從某一速度偏差值到零的時段里,大車仍沿同一方向偏轉,直至△V數值反向變化時才扭轉過來。因此,當正常行走時△V越大,糾偏響應速度越慢,扭偏的時間和距離都增大。
5 在實際作業中,存在司機部分操作頻繁點動糾偏手柄的現象,利用點動瞬間電機卡頓頻繁微調來達到糾偏的目的,可能糾偏效果會好點,但這種不規范的行為,對大車機構頻繁沖擊,損傷較大,鏈條容易斷裂,糾偏手柄也容易損壞,一旦出現問題,驅動、制動、糾偏就會失效,就可能會釀成事故。
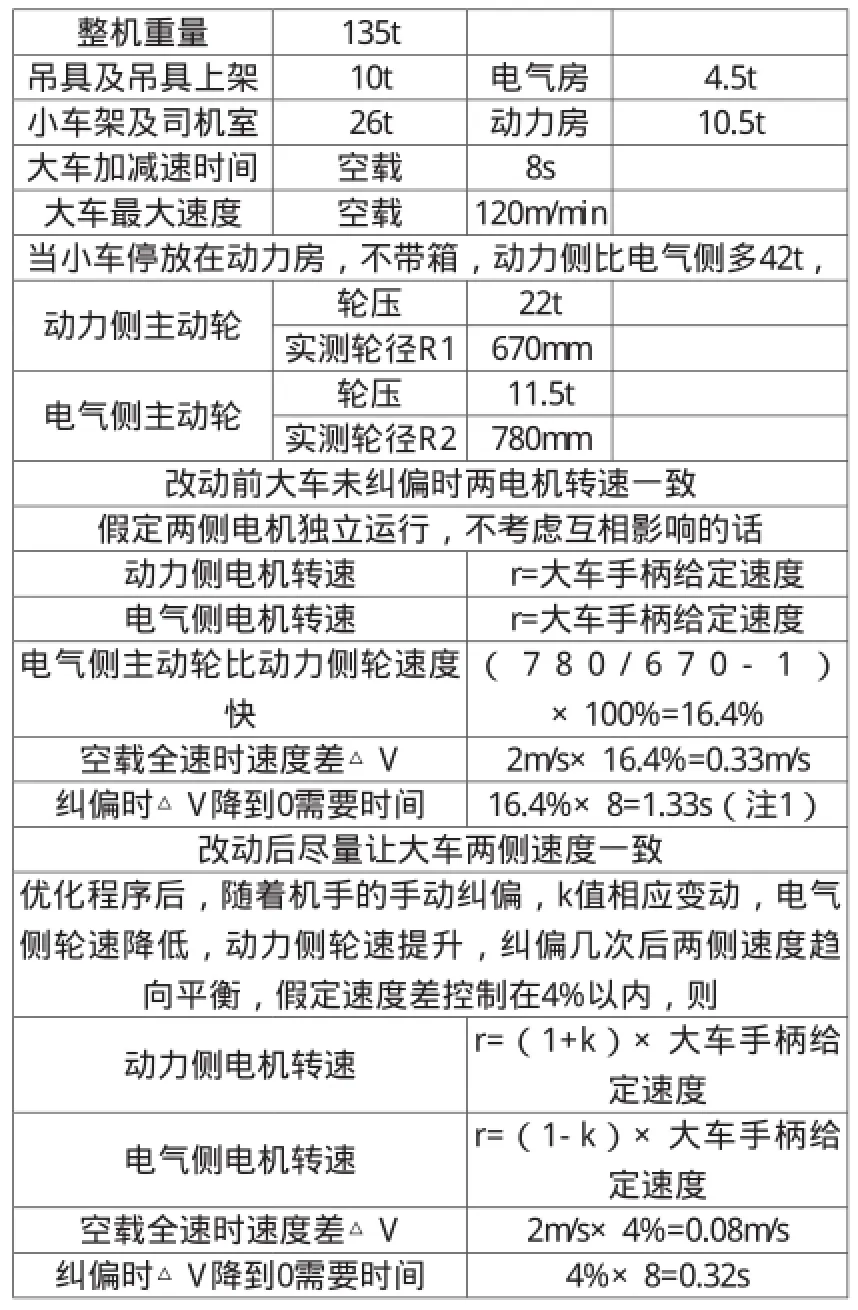
表1
四、大車正常行走及糾偏時的優化方案
1 從上文分析來看,當大車正常運行時,如能將兩側速度差△V盡量減小,則可解決大車易跑偏、糾偏不力和響應慢的問題。而減少△V有三種方法。一是減小輪徑差,可通過調整小車位置到輪徑大的一側來實現,但調整幅度固定,且有時受到視線影響,操作不便;二是放慢大車速度,但此方法不會改變大車運行軌跡,斜率不變;三是改變電機轉速,使之與輪徑比成反比,輪徑大的一側電機速度慢,另一側變快,這點可以通過程序編程來實現自動調整。當大車運行時,不能讓程序輸出同樣的速度值給電機,而是讓大車速度快的一側電機速度值變小,另一側變大。具體作法:設定一系數k,初始值為0,電機1速度=(1+k)×手柄給定速度;電機2速度= (1-k)×手柄給定速度,當大車糾偏手柄每動作一次,k視手柄動作方向增加或減少0.005,兩大車電機轉速就會一大一小,大車速度差△V也跟著減小,在多次糾偏大車兩側速度趨向一致后,手柄往兩側動作的機率相同,k趨向一穩定值,△V會在零值附近變動,大車不易跑偏,同時因速度差變小,當糾偏動作時,速度扭轉所需加減速時間也跟著減少,響應速度變快,大車就能快速向指定方向偏轉。
2 針對高速或低速糾偏效果差的問題,可以在糾偏程序段中修改程序。有兩種方法:一是直接給定電機速度,設定全速時電機一個等于最高速度,另一個等于最高速度/1.5。慢速糾偏類似,其它速度段不變;另一種是降低全速時的電機速度,使電機全速糾偏時電機速度值仍能繼續提升。
3 在修改程序中要注意細節,完善程序。如限制K值的取值范圍在-0.2~0.2之間,考慮大車全速時電機速度調整值(1+k)×手柄給定速度超過最大速度帶來的影響,必要時降低全速時的手柄給定速度。要注意優化方案1改變的是大車正常行走時的電機速度,方案2修改的是大車糾偏時電機的速度,二者不可混淆。
4 為防止K值出現較大變動,還要提醒司機在操作中注意操作習慣,不要頻繁的點動糾偏,影響K值,進而影響到大車速度的給定值,導致兩側速度失衡。
五、案例說明
下面以現場實測的輪胎輪徑為例,計算其對大車速度及糾偏的各種影響,見表1。
從案例中可以看到,大車兩側速度差原為0.33m/s,優化后變成0.08m/s;響應時間從1.33s縮小到0.32s,響應距離從2.66m減少到0.64m。
六、實際成效
為了驗證本方案的可行性,我們對我司2#RTG進行了程序修改。經過測試,取得了令人滿意的效果,全速糾偏問題得到徹底解決,糾偏靈敏度明顯提高,沒有再反映糾偏不力、糾不正的問題。而軌道跑偏問題,由于在正常情況下,輪徑差距并不會太大,同時司機糾偏后輪胎角度與軌道方向仍存在一定夾角,軌道跑偏不可避免,故司機感覺改善效果不明顯。
結語
目前場橋的自動糾偏技術已比較成熟,能實現自動控制和調整,無須司機手動糾偏,但投資費用大,改造周期長。而本方案無須增加任何硬件,僅對程序進行修改,零費用投入,也無須司機額外操作,即可自動調整大車兩邊速度,提高糾偏效果,是一種可行性極高的半自動糾偏方法,對改善操作性能、降低工作強度、提高設備安全具有重要作用。
參考文獻
[1]劉俊偉.集裝箱場橋自動取電小車控制改造[J].集裝箱化,2011,22(4):32-33.
中圖分類號:TP391
文獻標識碼:A
