雷達目標動靜態(tài)多極化回波仿真分析*
2016-07-21 05:19:42李亭劉宇
現(xiàn)代防御技術 2016年2期
李亭,劉宇
(中國人民解放軍91336部隊,河北 秦皇島 066326)
?
仿真技術
雷達目標動靜態(tài)多極化回波仿真分析*
李亭,劉宇
(中國人民解放軍91336部隊,河北 秦皇島066326)
摘要:針對建立雷達目標動態(tài)多極化回波模型問題,提出了一種基于FEKO軟件的快速多極化動態(tài)RCS仿真方法。首先通過靜態(tài)目標多極化回波仿真得到全空域RCS數據,再根據預先設定的兩種航跡,經過坐標轉換得到雷達相對于飛機的實時方位和俯仰角,最后通過仿真得到HH,VH,VV和HV 4種極化方式的動態(tài)RCS序列。仿真結果可為目標隱身與反隱身技術研究提供參考。
關鍵詞:多極化;回波;坐標轉換;靜態(tài)目標;動態(tài)目標;雷達散射截面
0引言
雷達目標回波模型主要分動態(tài)和靜態(tài)2個方面,對動態(tài)模型的研究對作戰(zhàn)具有更高的實際應用價值。動態(tài)回波模型的獲取主要有外場實際測量和仿真計算2種方式。外場實際測量對環(huán)境和成本要求高,因此仿真計算成為獲取動目標回波數據的必然選擇[1-2]。大部分目標在不同姿態(tài)角下,對于不同極化方式的電磁波散射是不同的,并且對于大多數目標來說,經過目標散射之后,入射場的極化方式與散射場的極化方式有較大改變,這種現(xiàn)象稱之為退極化現(xiàn)象[3-5]。因此在對雷達目標回波信號進行仿真分析時需要分析不同極化方式下目標RCS的極化特性[6-7]。文獻[8]提出了利用雷達目標的運動航跡求解雷達動目標姿態(tài)角的方法并給出動態(tài)雷達目標RCS。文獻[9]仿真計算了典型隱身飛機在3個不同頻率下2種主極化的全向動態(tài)RCS特性。文獻[10]運用空氣動力學原理提出一種非合作目標動態(tài)RCS仿真方法,獲取了隱身攻擊機在4種典型航路下的動態(tài)RCS特性數據。
本文主要研究動目標的多極化回波模型。首先通過靜態(tài)目標仿真得到4種極化方式下的全空域RCS數據,再根據預先設定的2種航跡經過坐標變換得到雷達相對于飛機的實時方位和俯仰角,最后通過仿真得到4種極化方式下的動態(tài)RCS序列。
1靜態(tài)目標多極化回波仿真
RCS是表征雷達目標對于照射電磁波散射能力的一個物理量,定義為單位立體角內目標朝接收方向散射的功率與從給定方向入射于該目標的平面波功率密度之比的4π倍[11-12]。即

(1)
由于雷達一般采用高頻波段,因此人們關心的是飛機目標在光學區(qū)的散射特性。目前,許多成熟的電磁計算軟件都是基于高頻近似方法進行計算的,計算方便快捷且結果準確,因此,本文采用電磁仿真軟件FEKO來計算飛機的全空域靜態(tài)RCS,如圖1所示。由于計算頻率較高,選擇FEKO中的物理光學法(PO)來求解靜態(tài)RCS。

圖1 飛機全空域求解Fig.1 All space solving of the plane
首先通過3D繪圖軟件SolidWorks繪制某型飛機的1∶1模型,保存為x_t格式導入FEKO中,在進行電磁仿真計算時,方位角范圍取0~360°,俯仰角范圍取0~180°,掃描間隔為1°,1 GBZ下得到的HH,HV,VV,VH 4種極化方式的全空域RCS如圖2所示。
2動態(tài)目標多極化回波仿真
動態(tài)仿真區(qū)別于靜態(tài)仿真的機理主要包括:考慮雷達視線在飛機坐標系中的時變姿態(tài)角;飛機在飛行過程中姿態(tài)的變換;由與空中氣流變化和自身工作帶來的機身振動[13]。圖3為動態(tài)仿真流程圖。
首先根據設定的航跡解算飛機在雷達坐標系中的實時位置坐標,其次在解算雷達視線在飛機坐標系中時變姿態(tài)角時考慮飛機自身姿態(tài)的變換,并加入飛機自身的隨機抖動模型,最后通過讀取靜態(tài)全方位RCS數據庫中相應數據得到實時動態(tài)RCS序列。
2.1坐標系變換
(1) 雷達坐標系
在雷達坐標系中,雷達位于坐標原點,取正東方向為x軸,正北方向為y軸,z軸按右手定則確定[14]。雷達與目標之間方位角φ、俯仰角θ和目標距離R關系如圖4所示。
(2) 飛機坐標系
在飛機坐標系中,平移雷達坐標系使原點移至飛機目標的質心位置,取平行于機身軸線且指向前方為x′軸,即機頭方向,右翼方向為y′軸,z′軸按右手定則確定。目標與雷達之間方位角φ′、俯仰角θ′和目標距離R′關系如圖5所示。
設(x,y,z)為雷達坐標系中任意點的坐標,(xt,yt,zt)為飛機在雷達坐標系下的坐標,(xr,yr,zr)為雷達在飛機坐標系下的坐標,則(xt,yt,zt)與(xr,yr,zr)的關系如下式所示。

(2)
式中:C為從雷達坐標系到飛機坐標系的變換矩陣。
(3)
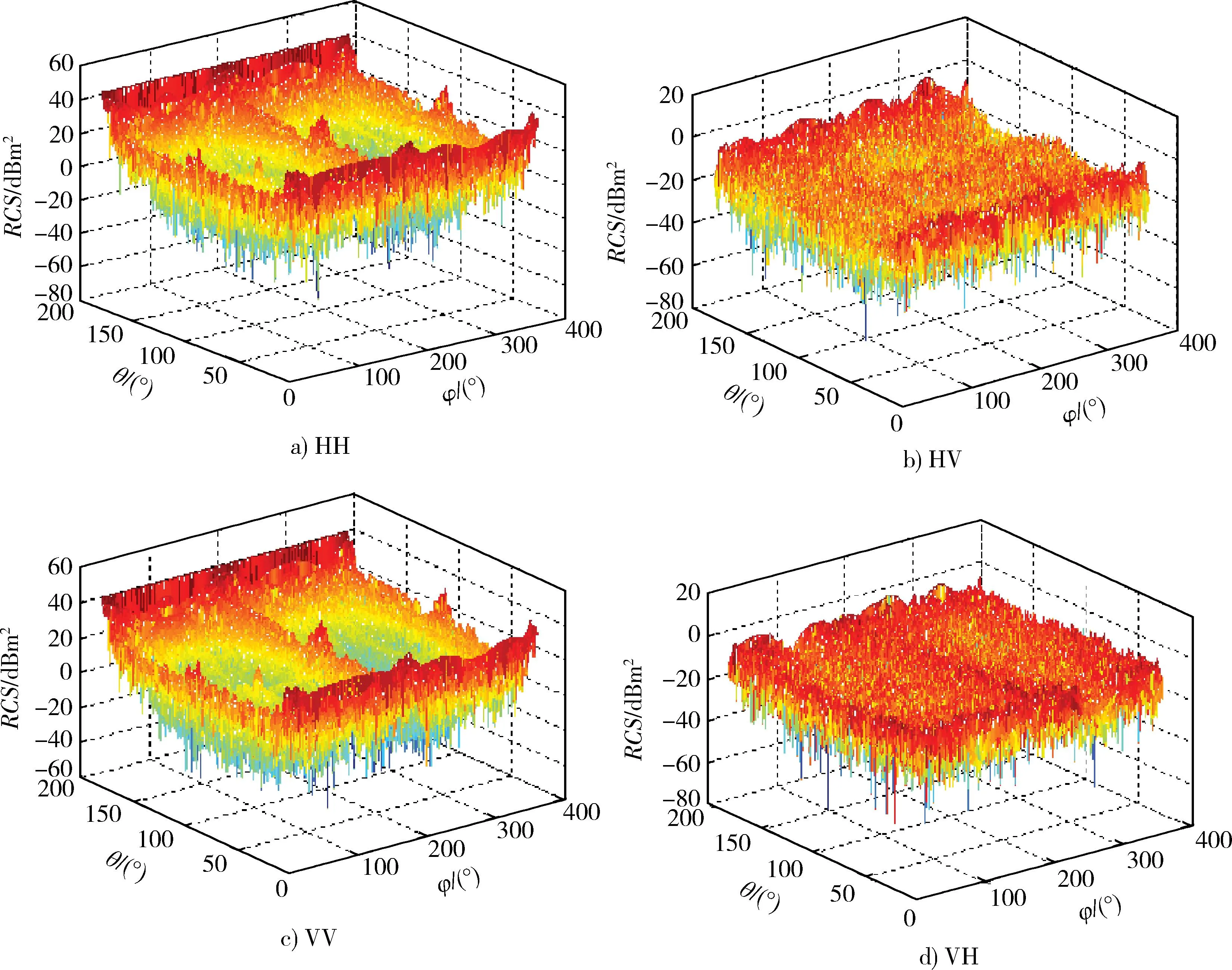
圖2 飛機全空域靜態(tài)RCSFig.2 All space static RCS of the plane
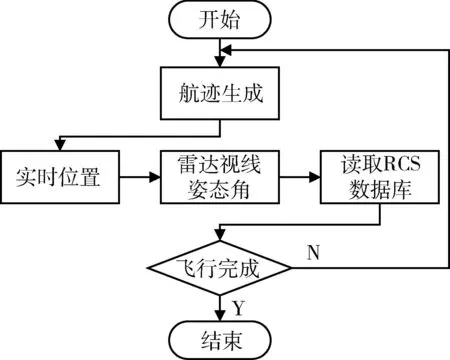
圖3 動態(tài)仿真流程圖Fig.3 Flow chart of dynamic simulation
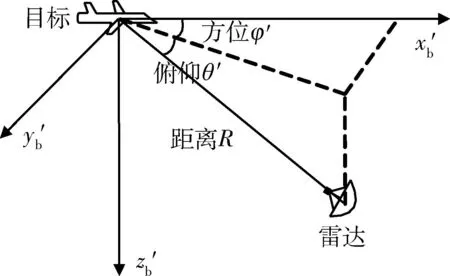
圖5 飛機坐標系Fig.5 Plane coordinate system
式中:θ,φ,η分別表示飛機質心在雷達坐標系下的俯仰角、方位角和滾轉角,如圖6所示。
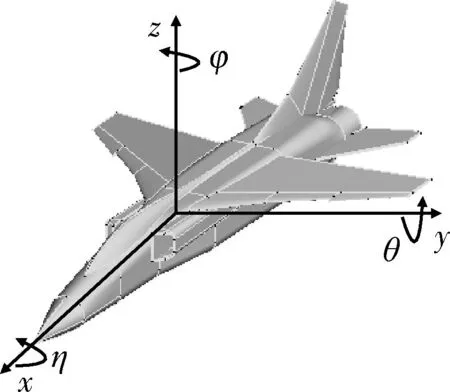
圖6 飛機姿態(tài)角Fig.6 Attitude angle of plane
2.2航跡設定
本文設定2種典型動態(tài)航跡,第1種為直線俯沖飛行,如圖7a)所示,在雷達坐標系中(0,20,2)km位置處勻速飛往(20,0,1)km點處,速度為v=100 m/s;第2種為側站盤旋飛行,如圖7b)所示,在以距離雷達20 km,1 km高空處為圓心,半徑r=10 km、速度v=100 m/s做勻速盤旋飛行,假設飛機的俯仰角θ=5°,滾轉角η=30°,箭頭指向代表飛機航向。
2.3隨機擾動模型
飛機在實際飛行過程中,由于氣流的不確定性、背景噪聲、 雷達自身抖動以及飛機的性能等多方面的原因,將會引起飛機的抖動,引起抖動的原因比較復雜,飛機的抖動是一個隨機過程。飛機飛行環(huán)境對目標造成的擾動主要影響是會造成目標姿態(tài)的擾動,從而在目標的回波中產生附加的調制頻譜分量,隨機擾動對在飛機自身坐標系中的目標的影響主要有目標的俯仰角和偏航角的抖動[15]。引入一種飛行抖動模型:
(4)
式中:φt,θt分別為t時刻在飛機坐標系中的俯仰角和偏航角的擾動量;rand1(t+1),rand2(t+1)分別為在[-1,1]上的正態(tài)分布;ρ=e(-Δt/T),T為飛機目
標的擾動周期,Δt為采樣間隔;σφ,σθ分別為方位角和俯仰角的擾動方差。
2.4姿態(tài)角解算
假設飛機在雷達坐標系中的位置為(xr,yr,zr),則經過坐標變換即可得到雷達在飛機坐標系中相應的位置(xb′,yb′,zb′),即為雷達視線坐標,因此實時視線姿態(tài)角θ(t)和φ(t)為
(5)
根據如圖7所示設定的2種航跡,加上隨機擾動模型的影響,飛機直線俯沖飛行航跡與側站盤旋飛行航跡的視線姿態(tài)角隨時間變化曲線分別如圖8,9所示。
2.5仿真計算
圖10,11分別為直線俯沖航跡和側站盤旋航跡相應的多極化動態(tài)RCS變化曲線,從圖中可以看出,由于飛機姿態(tài)角隨時間動態(tài)變化,相應的4種極化方式動態(tài)RCS均具有較大起伏。一般主極化RCS要大于交叉極化,但也存在某時刻交叉極化RCS值較大的現(xiàn)象。表1,2分別為直線俯沖航跡和側站盤旋航跡4種極化方式的動態(tài)RCS數據統(tǒng)計特征參數對比,從表中可以看出,在2種航跡下主極化的動態(tài)起伏均比交叉極化的變化更加劇烈,且主極化的RCS值平均要比交叉極化大10 dB以上,同時,通過對比2種主極化方式還可以看出水平極化的RCS平均值要大于垂直極化。
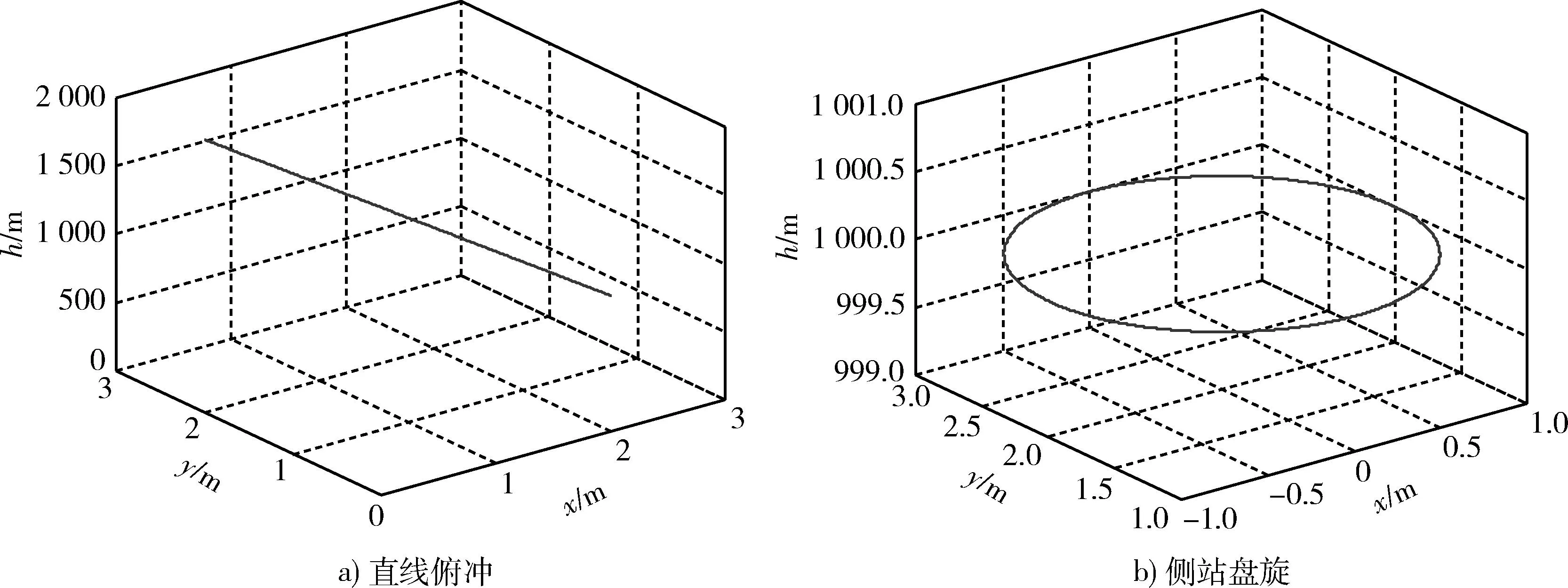
圖7 飛行航跡示意圖Fig.7 The schematic of flight track
圖8 直線俯沖時視線姿態(tài)角動態(tài)曲線Fig.8 Dynamic attitude angle curve by straight diving
圖9 側站盤旋時視線姿態(tài)角動態(tài)曲線Fig.9 Dynamic attitude angle curve by side hovering
圖10 直線俯沖多極化動態(tài)RCS仿真結果Fig.10 Dynamic multi-polarization RCS results by straight diving
圖11 側站盤旋多極化動態(tài)RCS仿真結果Fig.11 Dynamic multi-polarization RCS results by side hovering
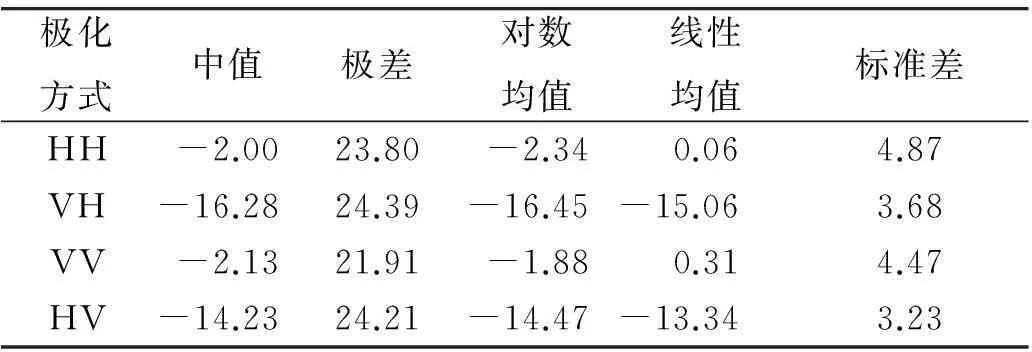
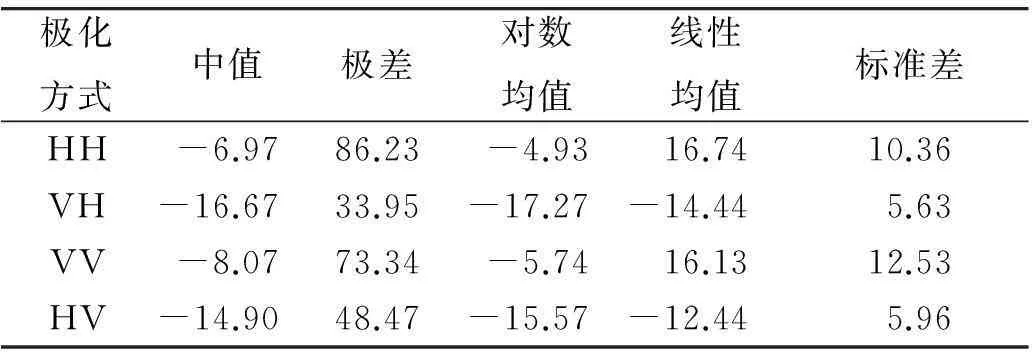
表2 側站盤旋動態(tài)RCS數據統(tǒng)計特征參數對比
3結束語
本文仿真方法為快速獲得動態(tài)目標多極化回波模型提供了可行途徑,首先通過靜態(tài)目標多極化回波模型仿真得到4種極化方式下的RCS數據,再根據預先設定的兩種航跡通過坐標變換得到雷達相對于飛機實時的方位和俯仰角度,并加入了隨機抖動模型,使仿真更加貼近實際,最后通過仿真得到4種極化方式下的動態(tài)RCS序列。對動目標多極化特性研究具有重要意義,可為目標隱身與反隱身技術研究提供參考。
參考文獻:
[1]劉璇. 基于無源雷達的動目標回波仿真與定位研究[D]. 大連: 大連理工大學, 2013.
LIU Xuan. The Study on the Moving Target Echo Simulation and Localization in Passive Radar System [D]. Dalian: Dalian University of Technology, 2013.
[2]胡明春. 雷達目標電磁散射特性仿真與測量[J]. 現(xiàn)代雷達, 2012, 34(10): 1-5.
HU Ming-chun. Simulation and Measurement of Radar Target Electromagnetic Scattering [J]. Modern Radar, 2012, 34(10):1-5.
[3]黃培康,殷紅成,許小劍. 雷達目標特性[M]. 北京: 電子工業(yè)出版社, 2005:224-235.
HUANG Pei-kang, YIN Hong-cheng, XU Xiao-jian. Radar Target Characteristics [M]. Beijing: Electronics Industry Press, 2005:224-235.
[4]莊亞強,張晨新,周超,等. 飛機動態(tài)RCS序列的仿真研究[J]. 電光與控制, 2014, 21(7):103-106.
ZHUANG Ya-qiang, ZHANG Chen-xin, ZHOU Chao, et al.Simulation of Dynamic RCS Series of Aircraft [J]. Electronics Optics &Control, 2014, 21(7):103-106.
[5]吳小坡,時家明,莫正攀,等. 雙基地雷達對隱身目標探測區(qū)域的計算[J]. 現(xiàn)代防御技術, 2012, 40(4):123-127.
WU Xiao-po, SHI Jia-ming, MO Zheng-pan, et al. Caculation of Detection Coverage of Bistatic Radar Against Stealth Target [J]. Modern Defence Technology, 2012, 40(4): 123-127.
[6]戴崇,徐振海,曹學軍,等. 隱身目標多極化回波起伏模型研究[J]. 現(xiàn)代雷達, 2014, 36(10):83-87.
DAI Chong, XU Zhen-hai, CAO Xue-jun, et al.A Stu-dy on Fluctuating Model of Stealthy Target’s Multi-Polarization Echoes [J]. Modern Radar, 2014, 36(10):83-87.
[7]XU Xiao-jian, HUANG Pei-kang. A New RCS Statical Model of Radar Targets [J]. IEEE Transactions on AES, 1997, 33(2):710-714.
[8]陳俊吉,黃劍偉,許家棟,等. 動態(tài)雷達目標電磁散射中姿態(tài)角的計算[J]. 彈箭與制導學報, 2010, 30(6):183-185.
CHEN Jun-ji, HUANG Jian-wei,XU Jia-dong,et al.Caculation of Attitude Angle in Dynamic Radar Targets Electromagnetic Scattering [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2010, 30(6):183-185.
[9]莊亞強,張晨新,張小寬,等. 典型隱身飛機動態(tài)RCS仿真機統(tǒng)計分析[J]. 微波學報, 2014, 30(5):17-21.
ZHUANG Ya-qiang, ZHANG Chen-xin, ZHANG Xiao-kuan, et al.Statistical Analysis and Simulation of Typical Stealth Aircraft Dynamic RCS [J]. Journal of Microwaves, 2014, 30(5):17-21.
[10]戴崇,徐振海,肖順平. 非合作目標動態(tài)RCS仿真方法[J]. 航空學報, 2014, 35(5):1374-1384.
DAI Chong, XU Zhen-hai, XIAO Shun-ping. Simulation Method of Dynamic RCS for Non-Cooperative Targets [J]. Chinese Journal of Aeronautics, 2014, 35(5):1374-1384.
[11]戴崇,徐振海,肖順平. 雷達目標動靜態(tài)RCS特性差異分析[J]. 信號處理, 2013, 29(9):1256-1263.
DAI Chong, XU Zhen-hai, XIAO Shun-ping. Analysis for Differences Between Dynamic and Static RCS Characteristics of Radar Target [J]. Journal of Signal Processing, 2013, 29(9):1256-1263.
[12]周超,張小寬,張敬偉,等. 典型隱身飛機動態(tài)RCS時間序列研究[J]. 空軍工程大學學報, 2013, 14(3):15-18.
ZHOU Chao, ZHANG Xiao-kuan, ZHANG Jing-wei, et al.Analysis of Dynamic RCS Time Series of Typical Stealth Aircraft [J]. Journal of Air Force Engineering University, 2013, 14(3):15-18.
[13]吳永鵬,雷振亞,山團彪. 目標姿態(tài)對RCS動態(tài)測量影響的研究[J]. 電子科技, 2011, 24(4):51-54.
WU Yong-peng, LEI Zhen-ya, SHAN Tuan-biao. Study of the Effect of Target Pose on RCS Dynamic Measurement [J]. Electronic Sci. & Tech., 2011, 24(4):51-54.
[14]張居鳳,馮德軍,王雪松,等. 雷達目標動態(tài)RCS仿真研究[J]. 系統(tǒng)仿真學報, 2005, 17(4):834-837.
ZHANG Ju-feng, FENG De-jun, WANG Xue-song, et al.Simulation of Dynamic RCS Data of Radar Targets[J]. Journal of System Simulation, 2005, 17(4):834-837.
[15]羅宏. 動態(tài)雷達目標的建模與識別研究[D]. 北京:航天總公司第二研究院, 1999.
LUO Hong. Studies on the Modeling and Recognition of Moving Radar Targets [D]. Beijing: Second Research Institute of CASIC, 1999.
Analysis of Dynamic and Static Multi-Polarization Echoes Simulation of Radar Target
LI Ting, LIU Yu
(PLA,No.91336 Troop,Hebei Qinhuangdao 066326,China)
Abstract:Aiming at the problem of building the model of dynamic and static multi-polarization echoes of radar target, a method of simulating dynamic multi-polarization RCS by FEKO is proposed. Firstly, RCS data of total space is obtained through static multi-polarization echoes simulation. Secondly, plane’s attitude angel is obtained through coordinate transformation by the two certain tracks in advance. Lastly, the dynamic RCS of HH, VH, VV and HV four polar types are calculated by simulation. The simulation results can provide a support on studying the technology of stealth and anti-stealth.
Key words:multi-polarization; echoes; coordinate transformation; static target; dynamic target; radar cross section
*收稿日期:2015-04-06;修回日期:2015-07-07
作者簡介:李亭(1989-),男,江蘇江都人。碩士,助工,主要從事目標特性研究。
通信地址:066326河北省秦皇島市杜莊鎮(zhèn)754信箱E-mail:liting89720@126.com
doi:10.3969/j.issn.1009-086x.2016.02.035
中圖分類號:TN955;TP391.9
文獻標志碼:A
文章編號:1009-086X(2016)-02-0222-07