基于汽車縱向主動安全的控制方式研究
2016-07-20 23:50:14張文康潘文章
科技傳播 2016年11期
關鍵詞:汽車
張文康+潘文章
摘 要 本文主要針對汽車的安全性能,從縱向主動安全控制方式,高效快速的測量物體之間的距離,提高汽車的安全性能。文章首先介紹基于汽車縱向主動安全的控制方式——汽車主動安全避撞系統(tǒng)的相關概念,在此基礎上,分析了其在汽車信息感知、處理以及安全判斷等的作用。希望通過本文分析,為相關領域進行汽車安全研究提供借鑒。
關鍵詞 汽車;縱向主動安全;控制方式
中圖分類號 U46 文獻標識碼 A 文章編號 1674-6708(2016)164-0193-01
隨著汽車行業(yè)競爭的不斷增加,作為推動汽車工業(yè)發(fā)展的重要保障,對汽車控制技術進行理論與方法創(chuàng)新具有極為重要的現(xiàn)實作用。汽車安全性作為最基本的性能至關重要,作為主動安全控制的重要方式,縱向主動控制模式可以高效快速的測量物體之間的距離,可以為駕駛人員提供有效的信息,可以有效避免汽車碰撞事故的產生,因此極為重要。現(xiàn)今,汽車的安全裝置包括2種,即主動安全裝置和被動安全裝置。其中主動安全裝置主要基于汽車本身,為降低事故發(fā)生,主動采取措施的配置;被動安全裝置指的是當事故發(fā)生之后,為避免人員的傷亡以及財物的受損等,汽車本身采取的措施。在縱向主動安全控制中,最為成熟的技術為汽車主動安全避撞控制技術,本文主要針對汽車主動安全避撞控制技術研究基于汽車縱向主動安全的控制方式。
1 汽車主動安全避撞技術
汽車主動安全避撞技術作為最為成熟的主動安全技術,可以自動檢測可能與汽車產生碰撞的車輛、行人等障礙物,并及時發(fā)出報警措施。其組成包括車用測距傳感器、氣節(jié)門位置傳感器、路況檢測傳感器等。
1.1 行車信息感知以及處理
行車信息感知以及處理主要基于汽車上各種傳感器,包括車用測距傳感器、氣節(jié)門位置傳感器等,對車輛的運行進行實時監(jiān)測,并對必要信息進行處理,進而獲得可靠、有效以及準確的形成數據。對于汽車主動安全避撞控制系統(tǒng)所包含的車間距離測量傳感器,屬于主動避撞系統(tǒng)所獨有的。目前,國內外對于汽車縱向主動安全控制方式的研究,主要集中在對車間距離測量傳感器的研究和對測量信息的處理方面。
依據實現(xiàn)方式的不同,可將車間距離傳感器分為2種,即以機器視覺為實現(xiàn)方式的車間距離測量研究;以車載雷達系統(tǒng)為實現(xiàn)模式的車間距離測量研究。其中前者主要基于視覺信號,獲得車間的距離值,其中視覺信號具有以下優(yōu)勢,即探測范圍極寬、目標信息的完整性較好等,尤其是基于道路以及分道線的探測,具有不可比擬的優(yōu)越性,但此種模式存在極大的缺陷,表現(xiàn)在運算量巨大,對數據測量的實時性較低;攝像頭影響極大,且對于車間距離的測量,精度極低。
以車載雷達系統(tǒng)作為實現(xiàn)方式的車間距離測量,主要利用微波以及激光雷達的方式,經過處理雷達信號,獲得所需的車間距離以及相對速度等。同以機器視覺為實現(xiàn)方式的車間距離相比,雷達測量具有好的實時性、準確性,這使得國內外很多研究人員選擇器作為車輛距離獲得的主要模式。通過介質的區(qū)別,可將其分為激光雷達以及微波雷達2種,其中同激光雷達相比,微波雷達的運行更加可靠,更不易受外界環(huán)境的干擾,但此種模式具有極高的成本以及結構極其復雜。
通過雷達獲得的車輛運動信息,基于測量原理的限制,所獲得的目標信息含有很多測量噪聲,因此,需要進行處理。目前采用最多的處理方式為卡爾曼濾波原理,但從原理分析,如果車輛相對于自車來講,具有恒定的相對速度或者是相對加速度,則采用卡爾曼濾波可以得到準確實時的車輛信息。但在實際中,汽車的速度以及加速度會經常發(fā)生變化,采用卡爾曼濾波則難以獲得準確、實時的車輛信息。因此,在基于汽車縱向主動安全的應用中,要注意。
1.2 行車的安全判斷
汽車縱向安全距離模型分為前向與后向2部分,其中兩者之間的判斷存在極大差別,因此,要分別考慮前向模型與后向模型2種。如圖1所示,為汽車以及其他車輛之間的相對位置形勢圖。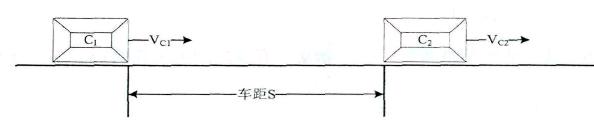
其中C1以及C2分別表示同向行駛的兩輛車,T時刻,兩車之間距離為S,兩車之間的相對行駛關系如表1所示。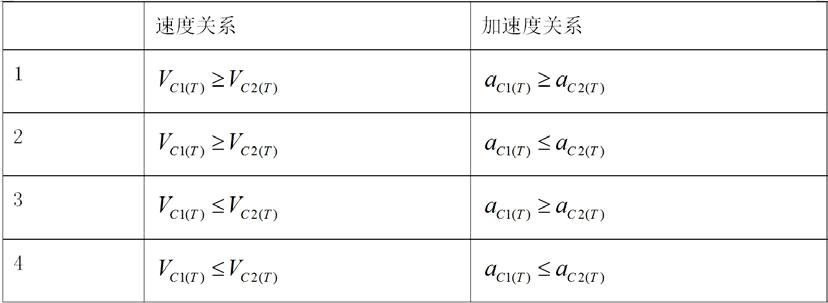
1.2.1 前向的安全距離模型
基于前向的安全距離模型主要包括2種警戒方式,即一般提醒報警以及緊急危險報警。
汽車在制動停止后,兩汽車之間應保持一個相對安全的距離s d,這一間距的選取要合理,否則會影響系統(tǒng)的虛警率,目前,國內外相關資料定義的相對安全距離為2m~5m,為進一步加強虛警率的降低,同時還可以確保汽車的安全,在基于汽車的前向安全距離模型中,一般選取mds2=。
對于汽車,其在運動過程中,本身的車速1 V可以通過車載速度傳感器獲得,兩車的相對速度1 2CV可以通過公式(1)表示: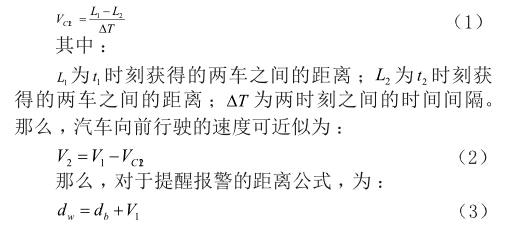
其中,wd表示一般的提醒報警距離;b d表示緊急危險情況下的報警距離。
1.2.2 后向的安全距離模型
汽車追尾事故的發(fā)生一般會引起連環(huán)反應,為了保證汽車在行駛當中具有足夠的安全,則需要研究汽車的后向安全距離模型。當汽車在緊急制動條件下,后方車輛還處于加速條件,這種情況極其危險。本文基于后向的安全距離模型構建,主要基于2種狀態(tài),即:車輛相對速度為負值條件,汽車的危險系數極低,此時不報警;
隨著汽車縱向主動控制系統(tǒng)的日趨復雜以及要求的越來越高,基于現(xiàn)代信息技術、傳感技術作為基礎的汽車縱向主動安全控制技術的要求越來越高,在車輛行駛過程中,對汽車縱向主動安全控制的人性化要求越來越強。在此基礎上,對基于汽車縱向主動安全的控制方式研究具有極強的現(xiàn)實意義。本文基于汽車縱向主動安全的控制方式——汽車主動安全避撞系統(tǒng)的相關概念,在此基礎上,分析了其在汽車信息感知、處理以及安全判斷等的作用。希望通過本文分析,為相關領域進行汽車安全研究提供借鑒。
參考文獻
[1]王建強,劉剛,李克強,等.復雜路況下汽車主動避撞報警技術研究[J].公路交通科技,2005,22(4):132-135.
[2]趙政春,陸綺榮,蔣冬初.汽車障礙物檢測系統(tǒng)的設計[J].計算機測量與控制,2007,15(4):432-434.
[3]唐文,李紹文.汽車主動避撞系統(tǒng)的改進方法與討論[J].汽車電子,2009,25(11-12):203-205.
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優(yōu)秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50