0.6m連續式跨聲速風洞總壓控制策略設計
2016-07-05 12:53:35黎壯聲楊鵬程張永雙郭守春陳天毅
實驗流體力學 2016年4期
黎壯聲,楊鵬程,陳 旦,張永雙,郭守春,陳天毅
0.6m連續式跨聲速風洞總壓控制策略設計
黎壯聲,楊鵬程,陳 旦*,張永雙,郭守春,陳天毅
(中國空氣動力研究與發展中心,四川綿陽 621000)
總壓作為連續式風洞控制系統關鍵指標之一,其控制精度及快速性對提高風洞試驗效率、降低能耗具有重要意義。0.6m風洞為國內首座具備負壓試驗能力的連續式跨聲速風洞,其試驗工況多,壓力范圍廣,針對該風洞壓力特性,設計了總壓控制策略,根據不同的壓力工況確定不同的閥門組合控制方式;同時針對模糊PID對連續式跨聲速風洞寬壓力范圍、多調節工況下壓力控制適應性較差的問題,提出分段變參數加模糊PID相結合的控制算法,即先根據目標總壓確定不同分段區間下基本合理的基準P、I參數,再結合模糊控制算法對基準參數進行修正。風洞調試結果表明,總壓控制精度優于0.1%,控制策略能夠有效滿足不同工況的控制要求。
連續式跨聲速風洞;總壓;控制策略;分段變參數;模糊PID
0 引 言
0.6 m×0.6m連續式跨聲速風洞(以下簡稱0.6m風洞)為國內首座具備負壓實驗能力的連續式跨聲速風洞,試驗馬赫數范圍為0.2~1.6,壓力范圍為20~250kPa(絕對壓力),具有3個試驗段,該風洞通過閥門控制系統實現常壓、增壓和降壓運行,其中增壓、常壓運行通過調節進排氣系統實現,降壓運行通過調節抽真空系統實現。
風洞的總壓調節能力及精度是風洞的一個重要技術指標,對提高試驗效率和試驗數據精準度具有重要作用。目前,國內連續式跨聲速風洞數量較少,NF-6風洞作為國內首座連續式跨聲速風洞,其馬赫數范圍較窄,試驗工況相對較少[1-2]。目前國內外風洞對馬赫數控制方法描述較多,而對連續式風洞總壓控制及馬赫數和總壓的耦合關系描述較少[3-11]。暫沖式風洞壓力控制通過主調壓閥和引射器調壓閥等實現[9-11],而0.6m連續式風洞壓力主要通過進排氣和抽真空閥門/泵組合來實現,且總壓調節受馬赫數調節手段影響,可借鑒的內容較少。各種改進的模糊PID控制方法在風洞中尤其是馬赫數或風速控制的應用較多[12-13],文獻[13]對某暫沖式風洞主氣流壓力控制原理進行了簡單分析,并引入模糊控制概念,總壓控制精度達到0.5%,因此本文擬采用模糊PID來進行總壓控制,但其控制參數大幅跳動時容易導致控制器輸出跳動,進而導致壓力波動,因而需要結合0.6m連續式風洞壓力特性對控制算法進行優化。
0.6 m風洞閥門系統結構見圖1。
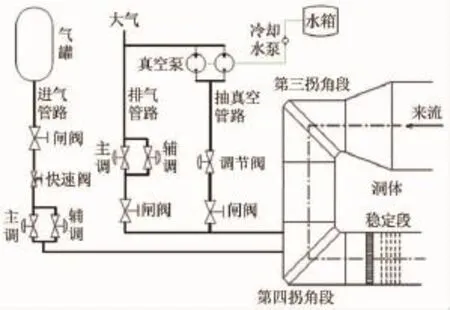
圖1 閥門系統結構示意圖Fig.1 Structure sketch of valve system
不同于現有其他風洞,該風洞壓力調節系統具有以下特性:
(1)總壓調節手段多,包含9臺閥門和3臺泵,不同的壓力工況采用不同的閥門組合進行控制。
(2)壓力控制范圍廣,從絕對壓力20kPa至250kPa,涉及常壓、增壓、負壓3種不同的工況,且試驗過程中可連續變總壓、連續變馬赫數和連續變迎角[]。
(3)壓力控制精度要求高,設計指標為0.2%(常壓和增壓)[15]。
(4)作為大型連續式風洞的引導性風洞,風洞運行過程中迎角、二喉道、壓縮機轉速、駐室抽氣流量等隨時需要調節,這些因素都對總壓有較大影響,從而導致壓力場波動較大,需要總壓控制策略具備很強的適應能力[14-15]。
本文主要研究內容為:分析0.6m連續式風洞的壓力控制特性,摸索多試驗工況、寬壓力調節范圍下具有較好適應性的壓力控制策略,并結合控制對象特性通過對模糊PID算法分段變參數的方式進行改進,并實施該風洞的壓力控制,為風洞控制策略優化及試驗效率的提高奠定基礎,同時為后續的大型風洞建設積累經驗。
1 風洞總壓和馬赫數耦合特性
連續式跨聲速風洞主要通過調節進氣/排氣/抽真空閥門的開度來實現總壓的調節,由于總壓和馬赫數在調節時相互耦合,致使調節難度加大,且調節時間較長,經過分析,總壓和馬赫數調節手段的耦合關系如圖2所示。
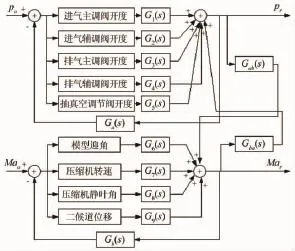
圖2 總壓、馬赫數耦合關系Fig.2 The coupling relation between total pressure and Mach number
其中,G1(s)至G9(s)分別為每種控制量的傳遞函數,Gab(s)為總壓對馬赫數的影響函數,Gba(s)為馬赫數對總壓的影響函數,Ga(s)為總壓控制傳遞函數,Gb(s)為馬赫數控制傳遞函數。
為提高總壓控制精度并減少調節穩定時間,理論上需要對總壓和馬赫數進行解耦控制,但目前總壓和馬赫數的解耦算法在工程應用中較少,更多是通過控制策略的優化并盡可能減少耦合的方式,因此,本系統設計時將多種馬赫數調節手段調節時對總壓的影響作為總壓控制的擾動對待,同時風洞馬赫數控制策略設計時減少總壓和馬赫數的耦合。0.6m風洞總壓控制主要通過調節相應的調節閥開度實現,因此需首先建立調節閥開度和風洞總壓的關系。對于可壓縮流體,理想情況下,流量Q和壓力之間關系為[16]:

其中,β為縮流處截面等效直徑與管道截面等效直徑之比;E為與流速有關的系數;A為縮流處截面積;ρ為密度;Q為體積流量;p1為入口靜壓;p2為出口靜壓,近似等于大氣壓;ε為流體膨脹系數。
同時,對于拋物線特性[17]的調節閥,在理想情況下其流量和閥門開度之間滿足下式:

其中,Qmax為流經閥門的最大流量,R為閥門的可調比,為流經閥門的最大流量和最小流量的比值,國內調節閥R一般取為30或50,l/L為閥門開度的百分比。
由式(1)和(2)可得調節閥開度和靜壓的關系,而風洞總壓由靜壓和動壓組成,進而得到調節閥開度和風洞總壓之間的關系:
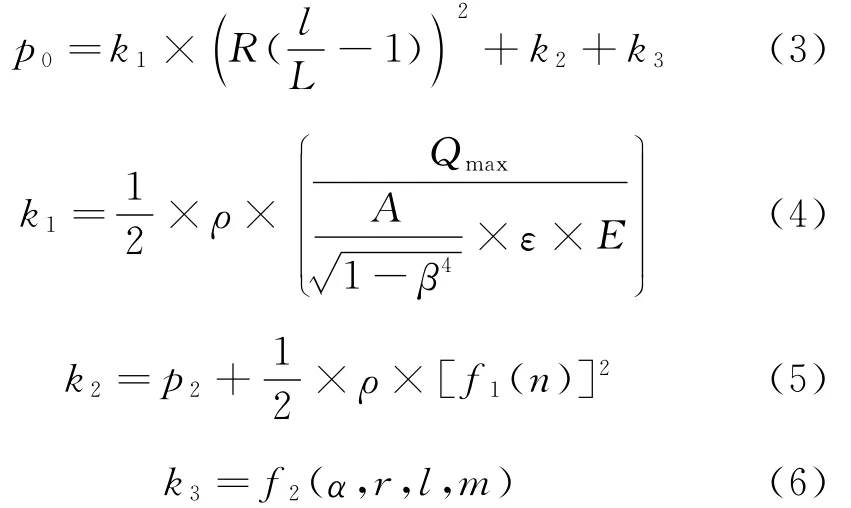
其中,p0為總壓,f1(n)為風速和壓縮機轉速的函數關系,考慮到穩定段氣流速度較低,可忽略不計,f2(α,r,l,m)為馬赫數調節對總壓的影響量,a為迎角變化梯度,r為壓縮機靜葉角,l為二喉道位移,m為駐室抽氣量。
由此可見,連續式風洞總壓影響因素包括:馬赫數調節方式、氣流介質密度(由風洞內總壓和總溫確定)、調節閥開度、氣源壓力等,本文重點對氣源壓力、閥門開度、壓縮機轉速和目標總壓進行考慮以設計總壓控制策略。
2 總壓控制策略
為保證總壓控制精度并確保風洞運行安全,考慮到PID算法具有結構簡單、穩定性好、工作可靠、調整方便的優點,但同時存在自適應能力差的缺點,因此擬采用模糊PID算法,其對壓力波動有較強適應性,但由于該連續式風洞壓力范圍較廣,且不同目標壓力區間下壓力特性不同,若單純采用模糊PID進行控制,可能導致不同壓力工況參數匹配度較差,從而帶來震蕩或超調,因此該連續式風洞總壓控制的核心算法采用分段變參數加模糊PID控制。
結合該連續式跨聲速風洞壓力變化規律,以及連續式風洞運行時壓縮機充氣密封系統將向風洞洞體內漏氣的特性,為節省氣源耗氣量,確定該風洞總壓控制策略為:
(1)當工況為常壓(控制壓力目標在大氣壓至105kPa)時,由于壓縮機充氣密封往洞體漏氣,因此僅利用排氣調節閥進行總壓控制;
(2)當工況為增壓(控制壓力目標大于105kPa)時,通過預置進氣閥開度和調節排氣閥進行總壓控制;
(3)當工況為負壓(控制壓力目標低于94kPa)時,開啟真空泵,通過預置進氣調節閥開度、開啟真空泵和調節抽真空調節閥進行總壓控制;
(4)當壓縮機轉速大幅上升或下降時,壓力會大幅波動,通過計算目標轉速和當前轉速誤差以及轉速誤差變化率,對參與調節的閥門采用分段限幅跟隨調節的方式,以減少積分飽和和超調,同時為減少總壓和馬赫數耦合,變馬赫數時采用多階梯升壓縮機轉速的控制方式。
(5)壓力調節過程中,進氣閥預置開度與氣源壓力和目標壓力滿足調試確定的函數關系,排氣主調閥進行壓力粗調(0.2%以上),待壓力穩定后由排氣輔調閥精調(0.2%以下至0.04%)。
3 分段變參數加模糊變參數PID算法
3.1模糊PID控制算法
模糊PID控制算法以常規PID控制為基礎,系統首先計算被控量的誤差e和誤差變化率ec作為二維模糊控制器的輸入變量,然后通過模糊化、模糊控制規則推理、解模糊得到KP,KI和KD的修正量,在控制過程中在線實時整定PID各參數,其原理已經非常成熟,這里不再累述。
3.2分段變參數加模糊變參數PI算法
由于風洞總壓控制范圍較寬,在不同的壓力區間,風洞的總壓特性不同,尤其當總壓較高時(p0≥200kPa),風洞排氣調節閥開度增大后總壓下降明顯,同時目前調節閥存在響應時間及執行速度較慢的問題,當壓力快速變化時閥門的調節速度跟不上“節奏”,因此若不根據壓力控制范圍對控制參數進行調整,而仍使用常壓時的基準調節參數,必然導致PID算法適應性差,產生較大的超調。因此,以模糊自適應PID為基礎,增加目標總壓作為輸入變量,首先根據目標總壓進行分段,基于不同的總壓控制目標結合簡單PI調試規律初步確定PI參數基準值,爾后由模糊算法進行變參數控制,以提高不同試驗狀態的自適應能力,原理框圖見圖3。
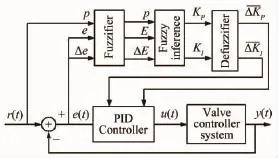
圖3 分段變參數加模糊PID控制框圖Fig.3 Block diagram of valve control system using segmented parameter and fuzzy PID
3.3模糊控制參數及規則表
閥門控制系統中,將計算出的目標壓力、實際壓力和給定壓力的誤差e和誤差變化率ec作為模糊控制器的輸入變量,PI控制器的2個參數KP、KI的修正量ΔKP、ΔKI作為輸出變量。誤差e基本論域取[-0.75,0.75],其偏差變化率ec的基本論域取[-0.5,0.5],輸出變量ΔKP、ΔKI基本論域分別取為[-0.5,0.5]、[-1.5,1.5],E、EC、ΔKP、ΔKI分別是輸入變量e、ec、輸出變量ΔKP、ΔKI所對應的模糊語言變量。E、EC、ΔKP、ΔKI都分別取7個模糊子集,其中NB、NM、NS、ZO、PS、PM、PB分別代表負大、負中、負小、零(又分成正零ZP、負零ZN)、正小、正中、正大。模糊語言變量選擇三角隸屬函數。
調試過程先摸索出不同壓力區間段的大體P、I參數,同時為防止控制輸出突跳,將控制參數進行擬合處理后再作為模塊控制的輸入,見式7。
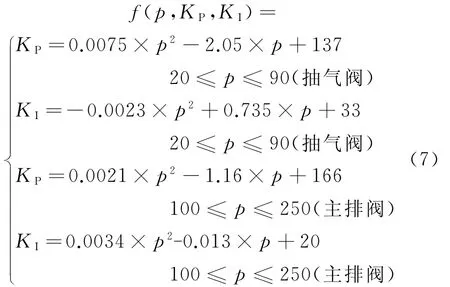
式中KP、KI為分段后基準比例系數和積分系數,p為目標壓力。根據不同目標壓力分段,能有效縮小適合當前目標壓力的基準P、I值范圍,基準P、I波動范圍縮小,也就縮小了最終的P、I參數波動的絕對值,進而避免了控制參數大幅跳動的問題。
表1給出了結合風洞壓力特性的分段變參數模糊PID控制規則表。
PID的實時控制參數是在基準P、I參數的基礎加上模糊算法得到的P、I參數增量。
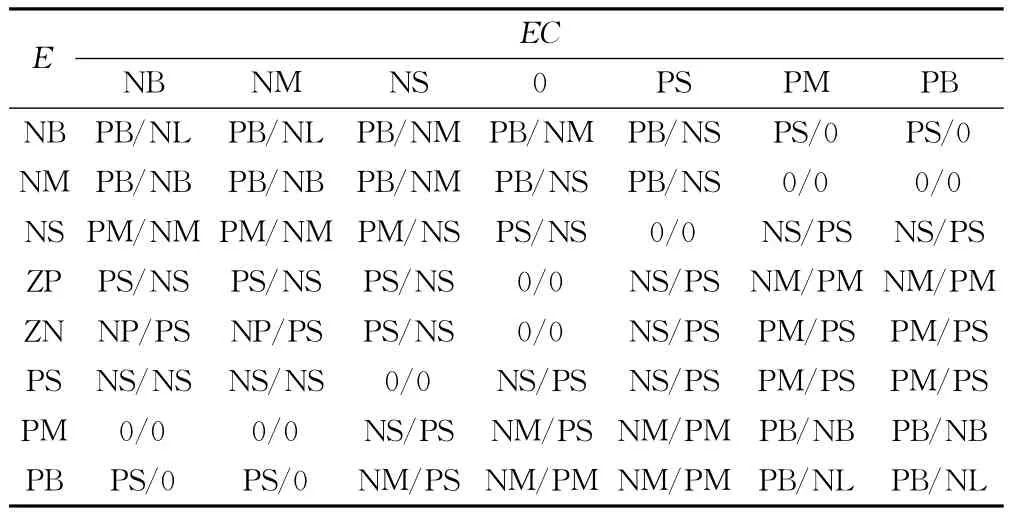
表1 閥門控制系統ΔKP、ΔKI參數Table 1 ΔKP、ΔKIparameter of valve control system
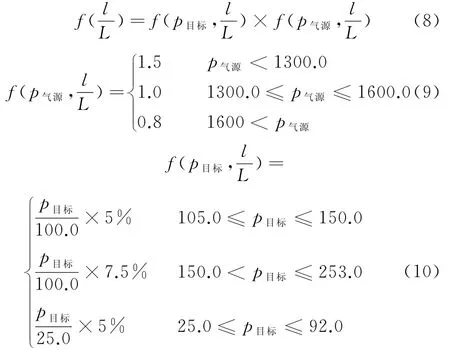
3.4進氣閥門開度預置
由于連續式風洞有大量用于氣密封的空氣往洞內泄露,因此常壓時采用氣密封漏氣加排氣閥調節的方式(進氣閥關閉);而在增壓時尤其高目標壓力段,當壓力欠壓時,若僅通過氣密封漏氣的方式進行補氣則速度過慢,需通過進氣閥門對風洞進行補氣,調試時為盡量減少氣源壓力波動對總壓控制的影響,結合閥門性能曲線,減少氣源消耗,進氣閥以一個相對固定的進氣量往風洞灌氣,進氣閥預置開度與氣源壓力和目標壓力滿足下列函數關系:
4 軟件流程設計
程序設計時首先基于模塊化編程方法,將閥門和泵進行組合以實現不同壓力工況控制,風洞運行時,根據工況命令調用不同的模塊,以滿足多種工況下閥門開關組合的控制邏輯需求,并通過壓力控制模塊實現閉環控制,壓力閉環由閥門系統PLC 315實現,風洞主控系統和閥門控制系統通過Profinet工業以太網進行通信,閥門控制系統軟件流程見圖4。
5 試驗驗證
為測試控制算法性能,對變總壓、變馬赫數、變迎角等不同工況均進行了調試,迎角范圍為-4°~14°,圖5和6列舉了不同工況下的典型測試結果,其中圖5為風洞在常壓和增壓工況下變馬赫數變迎角調試結果,圖6為負壓20kPa變馬赫數變迎角試驗結果。
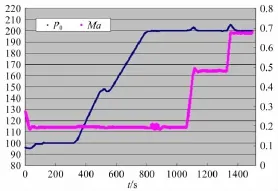
圖5 變馬赫數變迎角調試結果Fig.5 The debug result with varying Mach numbers and attack angles
由圖5和6可見,趨于穩態后,常壓100kPa時,總壓最大值100.071,最小值99.923,平均值100.002,[18]計算控制精度為0.079%,增壓200kPa時,總壓最大值200.152,最小值199.83,平均值200.01,控制精度為0.09%;負壓20kPa時,總壓最大值20.028,最小值19.972,平均值19.998,控制精度為0.15%;具體測試結果見文獻[19]。因此,總壓控制精度在常壓增壓工況時優于0.1%,在負壓工況時優于0.2%,達到國軍標先進指標[20],圖中馬赫數上升過程的超調主要由于調節閥的響應速度較慢導致。

圖6 20kPa變馬赫數變迎角調試結果Fig.6 The debug result with varying Mach numbers and attack angles at the pressure of 20kPa
6 結 論
經過試驗驗證,可以得出以下結論:
(1)利用分段變參數加模糊PID控制方法實現了0.6m風洞總壓精確控制,總壓控制精度優于設計指標要求,該控制方法對較寬壓力范圍或調節閥性能比較敏感的風洞壓力控制是有效的;
(2)如果進一步提高各調節閥的控制精度及響應速度,總壓控制精度和穩定速度將進一步提升;
(3)本文在0.6m風洞探討的風洞總壓控制策略可為后續大型風洞及其他連續式風洞的壓力控制方法提供參考。
下一步還將重點對總壓和馬赫數之間,不同馬赫數調節手段與總壓控制之間的耦合關系等方面展開更深入的研究。
[1]張永雙,陳旦,陳嬌.NF-6連續式跨聲速風洞馬赫數控制方式比較與研究[J].實驗流體力學,2013,27(2):95-99.
Zhang Y S,Chen D,Chen J.Comparison and research on the Mach number control methods for the NF-6continuous transonic wind tunnel[J].Journal of Experiments in Fluid Mechanics,2013,27(2):95-99.
[2]郝禮書,喬志德,張永雙,等.NF-6風洞馬赫數閉環控制系統設計研究[J].實驗流體力學,2010,24(4):85-88.
Hao L S,Qiao Z D,Zhang Y S,et al.Design research on the Mach number closed-loop control system in the NF-6wind tunnel[J].Journal of Experiments in Fluid Mechanics,2010,24(4):85-88.
[3]Jonathan R Potts1,Ian Lunnon,William J Crowther.Development of a transonic wind tunnel test bed for MEMS flow control actuators and sensors[R].AIAA-2009-319,2009.
[4]Nhan Nguyen,Mark Ardema.Adjoint method and predictive control for 1-D flow in NASA ames 11-foot transonic wind tunnel[R].AIAA-2006-1433,2006.
[5]Edward J Mickle,Capt Carmen Evans.Restoration of AEDC′s 16-ft transonic propulsion test capability[R].AIAA-2005-7614,2005.
[6]Tirres C,Baxter L E.AEDC test facility planning“toward new horizons”to today[R].AIAA-2004-2731,2004.
[7]廖達雄,陳吉明,彭強,等.連續式跨聲速風洞設計關鍵技術[J].實驗流體力學,2011,25(4):74-78.
Liao D X,Chen J M,Peng Q,et al.Key design techniques of the low noise continuous transonic wind tunnel[J].Journal of Experiments in Fluid Mechanics,2011,25(4):74-78.
[8]連曉飛.基于遺傳算法優化BP網絡的風洞馬赫數控制研究[D].沈陽:東北大學,2011.
Lian X F.Wind tunnel mach number control based on genetic algorithm optimized bp-neural network[D].Shenyang:Northeastern University,2011.
[9]高川,周波,蔣婧妍,等.基于labview的大型超聲速風洞總壓測控系統設計與應用[J].測控技術,2014,33(8):84-87.
Gao C,Zhou B,Jiang J Y,et al.Design and implementation of total pressure measurement and control system of large-scare supersonic wind tunnel based on LabVIEW[J].Measurement&Control Technology,2014,33(8):84-87.
[10]芮偉,易凡,杜寧,等.2.4m跨聲速風洞顫振試驗流場控制技術研究[J].實驗流體力學,2012,26(6):83-86.
Rui W,Yi F,Du N,et al.Study on flow field control technique of flutter test in 2.4mtransonic wind tunnel[J].Journal of Experiments in Fluid Mechanics,2012,26(6):83-86.
[11]褚衛華,湯更生,王帆.2m×2m超聲速風洞流場控制策略研究與實現[J].實驗流體力學,2012,26(5):98-102.
Chu W H,Tang G S,Wang F.Research and realization on the control strategies of the 2m×2msupersonic wind tunnel[J].Journal of Experiments in Fluid Mechanics,2012,26(5):98-102.
[12]李可,劉旺開,王浚.專家_模糊PID在低速風洞風速控制系統中的應用[J].北京航空航天大學學報,2007,33(12):1387-1390.
Li K,Liu W K,Wang J.Parameters self-tuning fuzzy-PID combined with expert control on wind velocity control system of wind tunnels at home[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(12):1387-1390.
[13]楊海濱,張偉,羅承友,等.模糊控制在風洞主氣流壓力自動調節系統中的應用[J].兵工自動化,2015,34(4):39-43.
Yang H B,Zhang W,Luo C Y,et al.Application of fuzzy control in wind tunnel main airflow pressure auto-adjust system[J].Ordnance Industry Automation,2015,34(4):39-43.
[14]張永雙.某型連續式跨聲速風洞測控系統初步設計方案[R].中國空氣動力研究與發展中心,2008.
Zhang Y S.The design scheme of measurement and control system for one type of continuous transonic wind tunnel[R].China Aerodynamics Research and Development Center,2008.
[15]陳旦.某型連續式跨聲速風洞閥門控制系統技術設計[R].中國空氣動力研究與發展中心,2012.
Chen D.The technological design of measurement and control system for one type of continuous transonic wind tunnel[R].China Aerodynamics Research and Development Center,2012.
[16]安延濤.大型壓力調節閥的動態分析及故障檢測研究[D].山東:山東大學,2012.
An Y T.Dynamic analysis and fault detection of large pressure control valve[D].Shandong:Shan dong University,2012.
[17]明賜東.調節閥計算選型使用[M].成都:成都科技大學出版社,1999.
Ming C D.Adjusting valve calculation lectotype use[M].Chengdu:Chengdu University of Science &Technology publishing house,1999.
[18]國防科工委.GJB 1179-91.高速風洞和低速風洞流場品質規范[S].北京,1992.
State Commission of Science and Technology for National Defense Industry.GJB 1179-91.Specification for flow quality of high and low speed wind tunnels[S].Beijing,1992.
[19]陳吉明,柳新民,張永雙.某型連續式跨聲速風洞設計技術總結[R].中國空氣動力研究與發展中心,2015.
Chen J M,Liu X M,Zhang Y S.The summarization of design for one type of continuous transonic wind tunnel[R].China Aerodynamics Research and Development Center,2015.
[20]總裝備部.GJB 5221-2004.風洞控制系統設計及檢定準則[S].北京,2004.
General Armament Department.GJB 5221-2004.Design and calibration criteria of control systems for wind tunnels[S].Beijing,2004.
The design of total pressure control strategy for 0.6mcontinuous transonic wind tunnel
Li Zhuangsheng,Yang Pengcheng,Chen Dan*,Zhang Yongshuang,Guo Shouchun,Chen Tianyi
(China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China)
The total pressure is one of the key indicators of the continuous tunnel control system,the control precision and speed of which are very important to improve the efficiency of wind tunnel test and reduce energy consumption.The 0.6mwind tunnel is the first domestic continuous transonic wind tunnel with the negative pressure test ability,which can provide lots of test conditions covering wide total pressures.Based on its pressure condition,the total pressure control strategy is designed,and the different control ways of valve combination are ascertained depending on the different pressure conditions.Meanwhile,the control algorithm of segmented parameters combining with the fuzzy PID is proposed,to improve the poor adaptability of fuzzy PID to the wide pressure range and multi-adjustment condition in continuous transonic wind tunnels.In our algorithm,the reasonable benchmark parameters P and I under the different segmentation interval due to the target total pressure should been determined firstly.Then it would been modified by fuzzy control algorithm.The result shows that the total pressure control accuracy is better than 0.1%,and the control strategy can adapt to the control requirement of different working conditions.
continuous transonic wind tunnel;total pressure;control strategy;segmented variable parameter;fuzzy PID
V211.74
:A

(編輯:李金勇)
1672-9897(2016)04-0087-06
10.11729/syltlx20150129
2015-11-04;
2016-03-25
*通信作者E-mail:cd0606@163.com
Li Z S,Yang P C,Chen D,et al.The design of total pressure control strategy for 0.6mcontinuous transonic wind tunnel.Journal of Experiments in Fluid Mechanics,2016,30(4):87-92.黎壯聲,楊鵬程,陳旦,等.0.6m連續式跨聲速風洞總壓控制策略設計.實驗流體力學,2016,30(4):87-92.
黎壯聲(1975-),男,廣西玉林人,高級工程師。研究方向:風洞控制。通信地址:四川省綿陽市二環路南段6號403信箱(621000)。E-mail:livdug@163.com。
猜你喜歡
儀器儀表用戶(2022年10期)2022-09-29 04:36:58
儀器儀表用戶(2022年9期)2022-08-30 05:39:48
流程工業(2022年3期)2022-06-23 09:41:08
儀器儀表用戶(2022年4期)2022-04-01 03:17:02
煤氣與熱力(2021年3期)2021-06-09 06:16:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
石油化工自動化(2018年5期)2018-11-14 02:34:26
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26