某鏈?zhǔn)轿淦骶彌_裝置的動力學(xué)仿真研究
2016-07-05 08:27:07符立華臺州科技職業(yè)學(xué)院浙江臺州318020
科技傳播 2016年12期
符立華臺州科技職業(yè)學(xué)院,浙江臺州 318020
?
某鏈?zhǔn)轿淦骶彌_裝置的動力學(xué)仿真研究
符立華
臺州科技職業(yè)學(xué)院,浙江臺州318020
摘要運(yùn)用多剛體動力學(xué)相關(guān)的理論和虛擬樣機(jī)建模技術(shù),在ADAMS軟件中建立某型號鏈?zhǔn)脚趽舭l(fā)循環(huán)過程的多剛體動力學(xué)仿真模型,對比分析緩沖裝置關(guān)鍵參數(shù)對整個武器系統(tǒng)工作特性的影響規(guī)律,并得到一個比較合理的結(jié)構(gòu)參數(shù)設(shè)計(jì)方案,一定程度上減小了該鏈?zhǔn)轿淦鞯暮笞秃笞灰啤?/p>
關(guān)鍵詞鏈?zhǔn)脚冢粍恿W(xué)仿真;后坐力;后坐位移
動力學(xué)仿真技術(shù)現(xiàn)在已成為機(jī)械系統(tǒng)分析、研究、設(shè)計(jì)中不可缺少的重要手段,在降低系統(tǒng)的研制成本、縮短產(chǎn)品試驗(yàn)周期方面起著越來越重要的作用。ADAMS軟件是美國MSC公司開發(fā)的,它通過特定的方式創(chuàng)建完全參數(shù)化的幾何模型,對建立的虛擬幾何模型進(jìn)行靜力學(xué)、動力學(xué)及運(yùn)動學(xué)分析,最后輸出位移、速度、加速度和反作用力等曲線[1]。
ADAMS仿真軟件能夠非常有效的縮短武器系統(tǒng)的研發(fā)周期,對于制造費(fèi)用和實(shí)驗(yàn)費(fèi)用都非常昂貴的鏈?zhǔn)脚冢珹DAMS仿真研究的優(yōu)點(diǎn)更加的突出。
1 建立動力學(xué)仿真模型
該鏈?zhǔn)脚谂谏砭彌_方式采用的是環(huán)形彈簧緩沖。由于環(huán)形彈簧的數(shù)量比較多,而且是非常復(fù)雜的圓錐面之間的相互接觸,假如對每個面之間的相互接觸都進(jìn)行定義,勢必會大大降低ADAMS軟件仿真分析的速度,同時由于環(huán)形彈簧在卸載時和加載時工作特點(diǎn)的不同,它們的剛度也是不一樣的,因此,在用ADAMS軟件進(jìn)行仿真的時侯,有必要對該彈簧的工作過程進(jìn)行一定的簡化。環(huán)形彈簧在加載和卸載時的軸向變形與受力之間的關(guān)系可以近似用線性關(guān)系進(jìn)行表達(dá),環(huán)形彈簧在加載時和卸載時的剛度k1、k2可用式(1)表示:

式中:n表示環(huán)形簧圓錐接觸面的對數(shù);A1表示彈簧外圓環(huán)的橫截面積;A2表示彈簧內(nèi)圓環(huán)的橫截面積;E表示彈簧材料的楊氏模量;R01表示彈簧外圓環(huán)截面的半徑;R02表示內(nèi)圓環(huán)截面的半徑;ρ表示摩擦角;β表示圓錐角。
根據(jù)本仿真研究的鏈?zhǔn)脚诘墓ぷ魈匦裕詈筮x定彈簧的摩擦角為14°,圓錐角為9°。再把選定的參數(shù)通過公式(1)進(jìn)行計(jì)算可得K1=4K2。
施加完載荷、驅(qū)動、約束并且對鏈?zhǔn)脚谂诠苓M(jìn)行必要的處理后,建立的ADAMS動力學(xué)仿真模型如圖1所示。
2 結(jié)果分析
2.1槍身后坐運(yùn)動特性
射擊過程中該鏈?zhǔn)脚诘暮笞灰魄€和后坐力特性曲線如圖2所示。

圖1 鏈?zhǔn)脚趧恿W(xué)仿真模型

圖2 后坐位移、后坐力特性曲線
對圖2的曲線進(jìn)行分析可以得到,第一發(fā)子彈的后坐位移和后坐力比后面四發(fā)子彈要小一些,這是因?yàn)閷ο到y(tǒng)進(jìn)行仿真時的開始位置和后面每發(fā)彈的循環(huán)開始位置是不同的,并且此時武器系統(tǒng)還沒有達(dá)到穩(wěn)定的狀態(tài),不是本文研究的重點(diǎn),因此,對第一發(fā)子彈引起的后坐位移和后坐力不作對比分析。在t=0.12 s 時,單邊后坐力大小是5 086N,這是第一次出現(xiàn)極大值,此時整個武器系統(tǒng)搭載的平臺受到的后坐力大小是10 172N;在t=0.15 s 時,前沖的單邊作用力為1 675N,此時整個武器系統(tǒng)搭載的平臺受到的前沖力大小是3 350N。在t=1.12 s 時,系統(tǒng)的后坐位移為20.45mm,這是第一次出現(xiàn)后坐極大值,在t=0.14 s時,系統(tǒng)的前沖位移為13.38mm,這是第一次出現(xiàn)前沖極大值。
該鏈?zhǔn)脚诓捎铆h(huán)形彈簧緩沖器作為緩沖裝置。對本文研究鏈?zhǔn)轿淦骱笞秃笞灰朴绊懽畲蟮沫h(huán)形彈簧結(jié)構(gòu)參數(shù)有直線剛度K、預(yù)壓力P、加載剛度和卸載剛度之比C,本文通過控制變量法,對這些參數(shù)進(jìn)行了大量的對比分析。
3 改進(jìn)方案結(jié)果分析
為了進(jìn)行有效的對比分析,文中采用控制變量法的方法。文章中所有的對比分析數(shù)據(jù)都是在射擊速度為600發(fā)/分鐘,仿真時間為0.5s的射擊工況下對比各個參數(shù)對鏈?zhǔn)轿淦骱笞秃笞灰频挠绊懱匦浴N恼略诮?jīng)過大量ADAMS動力學(xué)仿真以后,對每一個仿真得到的曲線進(jìn)行對比分析,最后選定一組最優(yōu)環(huán)形彈簧結(jié)構(gòu)參數(shù),此時鏈?zhǔn)轿淦鞯暮笞闆r的得到了明顯的改善。最后確定的最優(yōu)結(jié)構(gòu)參數(shù)是:環(huán)形彈簧加載時的彈簧剛度K1為170N/mm;卸載時的彈簧剛度K2為28.3N/mm;彈簧預(yù)壓力P為500N。對采用最優(yōu)環(huán)形彈簧的系統(tǒng)進(jìn)行仿真,得到的后坐力和后坐位移仿真結(jié)果如圖3所示。
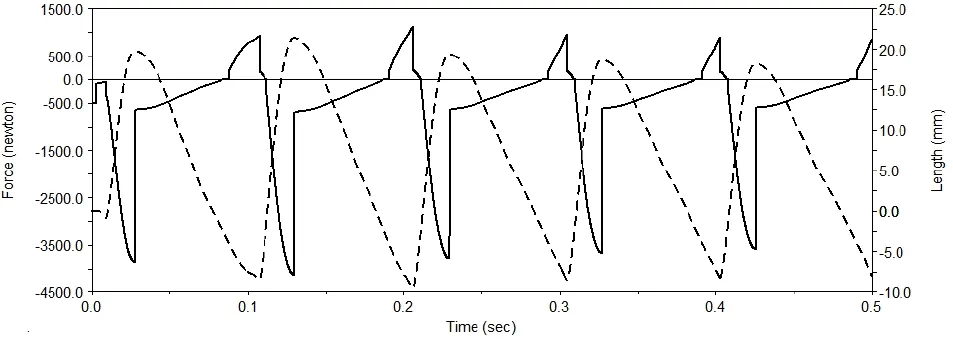
圖3 最優(yōu)方案后坐位移、后坐力特性曲線
分析圖3的曲線可以得到,在系統(tǒng)達(dá)到穩(wěn)定后,鏈?zhǔn)轿淦鞯膯芜吅笞ψ畲笾禐? 900N,前沖的最大位移為9.53mm,后坐的最大位移為21.35mm,。而采用最初方案時,在系統(tǒng)達(dá)到穩(wěn)定后,鏈?zhǔn)轿淦鞯膯芜吅笞ψ畲笾禐?0 158N,前沖的最大位移為13.38mm,后坐的最大位移為20.45mm。對比這兩個方案的結(jié)果可以得出,采用改進(jìn)方案后,系統(tǒng)單邊最大后坐力減小了2 258N,后坐位移最大值增加了0.92mm,前沖位移最大值降低了3.84mm。可以看出,最大后坐力得到了明顯的降低,雖然后坐位移最大值有所增加,但仿真結(jié)果顯示,這個后坐位移仍然能夠滿足武器系統(tǒng)的設(shè)計(jì)要求。同時鏈?zhǔn)轿淦鞯那昂罂傮w位移值降低了2.92mm,這在一定程度上能夠提高鏈?zhǔn)轿淦鞯纳鋼舴€(wěn)定性。
4 結(jié)論
本文是基于ADAMS的鏈?zhǔn)脚谶\(yùn)動機(jī)構(gòu)及緩沖裝置進(jìn)行了動力學(xué)仿真,對研究該鏈?zhǔn)脚诰彌_裝置對后坐力和后坐位移影響規(guī)律有很大的參考價值,并提出了一個相對合理的緩沖裝置參數(shù)方案,很大程度上縮短了該鏈?zhǔn)脚诘难邪l(fā)周期。
參考文獻(xiàn)
[1]郭衛(wèi)東.虛擬樣機(jī)技術(shù)與ADAMS應(yīng)用實(shí)例教程[M].北京:北京航空航天大學(xué)出版社,2008.
[2]何志強(qiáng),黃守仁,李載弘.航空自動武器設(shè)計(jì)手冊[M].北京:國防工業(yè)出版利,1990.
[3]張英會.彈簧[M].北京:機(jī)械工業(yè)出版社,1982:280-310.
[4]曾晉春,楊國來,王曉峰.某火炮自動機(jī)虛擬樣機(jī)建模與仿真[J].火炮發(fā)射與控制學(xué)報,2008(1):42-45.
[5]王寶元,梁世瑞,周發(fā)明.火炮自動機(jī)平面運(yùn)動凸輪機(jī)構(gòu)多體系統(tǒng)運(yùn)動分析[J].火炮發(fā)射與控制學(xué)報,2000(3):13-15.
中圖分類號TP39
文獻(xiàn)標(biāo)識碼A
文章編號1674-6708(2016)165-0225-02
作者簡介:符立華,臺州科技職業(yè)學(xué)院。