組網雷達的集中式數據融合技術研究
2016-07-04 00:26:3291245部隊葫蘆島125000
電子測試 2016年9期
王 乾(91245部隊,葫蘆島,125000)
?
組網雷達的集中式數據融合技術研究
王 乾
(91245部隊,葫蘆島,125000)
摘要:組網雷達能夠從不同角度對海空域進行探測,獲取多方位的數據,利用數據融合處理能夠提高對目標的探測能力。集中式數據處理方法可分為點跡合并式和串行合并式,本文針對串行合并式的坐標顯示問題進行了仿真分析。
關鍵詞:組網雷達;數據融合;集中式;串行合并式
0 引言
雷達系統數據融合通常是在信息處理中心完成的,每部雷達將各自發現的目標坐標數據送往信息處理中心,進行數據融合,這就是所謂的集中式多雷達數據融合處理方式。每部雷達送來的航跡,通常稱為局部航跡,融合之后形成的航跡通常稱為全局航跡或系統航跡。根據不同的雷達網絡結構,融合又分點跡融合和航跡融合。有時融合系統的結構確定了信息處理的關系,甚至影響其系統的性能。一般集中式網絡結構采用點跡融合,分布式結構采用航跡融合,由于點跡融合利用的是各部雷達的原始點跡,性能略高于航跡融合。
集中式多雷達數據處理方法可分為兩類:點跡合并式和串行合并式。點跡合并又稱為數據壓縮的方法。串行合并又稱為點跡-航跡合并算法。
1 串行合并式
串行合并又稱為點跡-航跡合成式,它較點跡合并式簡單。它在實際中有著廣泛的應用。它是將多雷達數據組合成類似單雷達的探測點跡用于點跡-航跡的互聯。點跡數據流合成的原理圖1所示。

圖1 集中式雷達數據流合成圖
根據上圖不難看出,點跡-航跡合成式的一個顯著特點是合成后的數據流數據率加大,這意味著跟蹤精度的提高,尤其兩部雷達都受到干擾后檢測概率下降的情況下,每部雷達對目標都很難進行連續跟蹤,即跟蹤精度大大降低,采用上面的方法可以較好地解決檢測概率下降情況下提高跟蹤精度問題。本文對其中的坐標顯示問題進行了仿真分析。
2 目標運動模型的建立
多雷達數據融合數學模型的實現是建立在目標運動的狀態方程上的,在直角坐標系統某一坐標方向上,目標運動的數學模型可用下列差分方程來描述,

(2.1)、(2.2)式可用狀態方程表示為
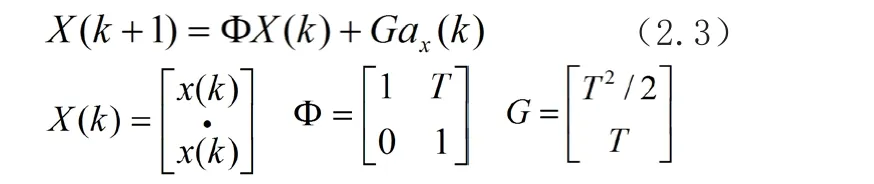
初始條件X(0)假定是高斯隨機變量,均值為mx(0),方差為px(0),以上只考慮了坐標系統的一個坐標方向,如考慮多維情況,如平面坐標系統,則系統的狀態方程為
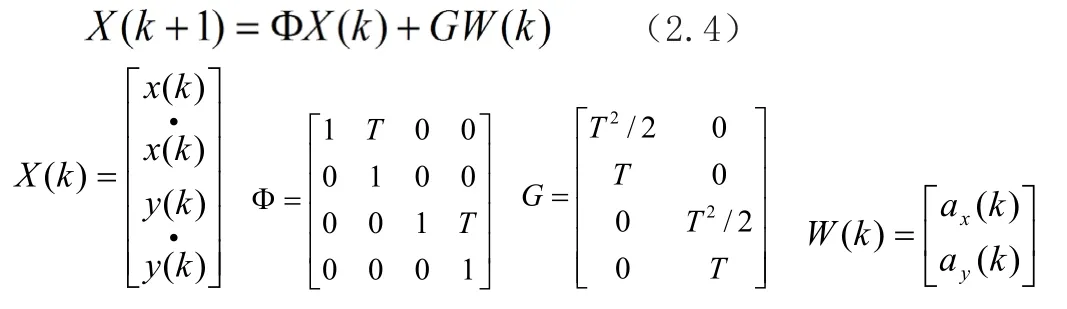
W(k)是高斯隨機序列,均值為零,方差陣為Q,一種簡單的情況是Q=I ,這意味著兩個坐標方向上加速度相互獨立,且有相同的方差,方程也很容易擴展到三維情況,這時狀態變量是六維的矢量。
以三部雷達為例,先看雷達1航跡的建立
雷達1的掃描周期:T
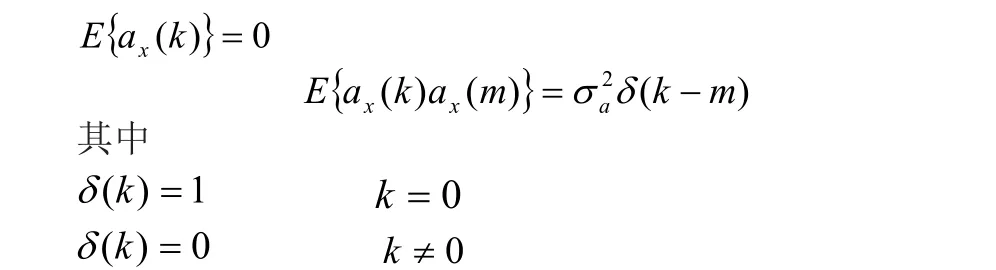
在實際情況下雷達對目標的探測是存在量測噪聲的,這就不得不引入量測方程
Z(k)=H(k)X(k)+V(k)
這里,Z(k )∈Rm是傳感器在k 時刻的觀測向量,觀測噪聲V(k )∈Rm是具有零均值的和正定協方差矩陣R(k)的高斯分布測量噪聲向量,即

再根據式(2.4)就可以建立雷達1的航跡,
其余兩部雷達航跡的建立方法如上。
串行合并式就是將多部雷達在同一時刻探測目標的數據放在一起,方法如圖1所示。 至此,我們利用上述公式建立了集中式多雷達數據融合的數學模型。
3 仿真測試分析
3.1 仿真環境設定
3.1.1 設雷達1與輻射源目標初始距離為x1= 1 000 m , y1= 1 500 m ,測距誤差和測角誤差為,采樣周期;雷達2與輻射源目標初始距離為,,測距誤差和測角誤差為,采樣周期,設目標作勻加速直線運動。目標初始速度為。蒙特卡洛實驗次數串行合并式中N=10,點跡合并式中N=100。
3.1.2 仿真在兩種坐標系下顯示。然后再進行比較。
3.1.3 在實際條件下引起誤差的因素有多種,一般都設定誤差屬于高斯分布,在仿真中,假設狀態誤差和量測誤差都服從高斯分布。
3.2 串行合并式下各種情況的比較
在串行合并式中,采用不同坐標相同周期、采用相同坐標不同周期的顯示以及在不同坐標下進行插值,然后對其進行比較。
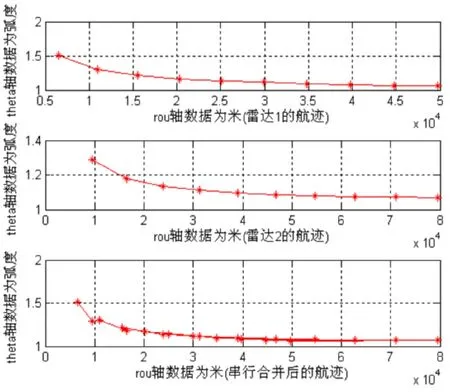
圖2 極坐標下顯示(周期不同)的仿真圖
在相同坐標下(周期相同與不同):
測試一:在極坐標系下顯示(周期不同)
測試二:在極坐標系下顯示(周期相同)

圖3 極坐標下顯示(周期相同)的仿真圖
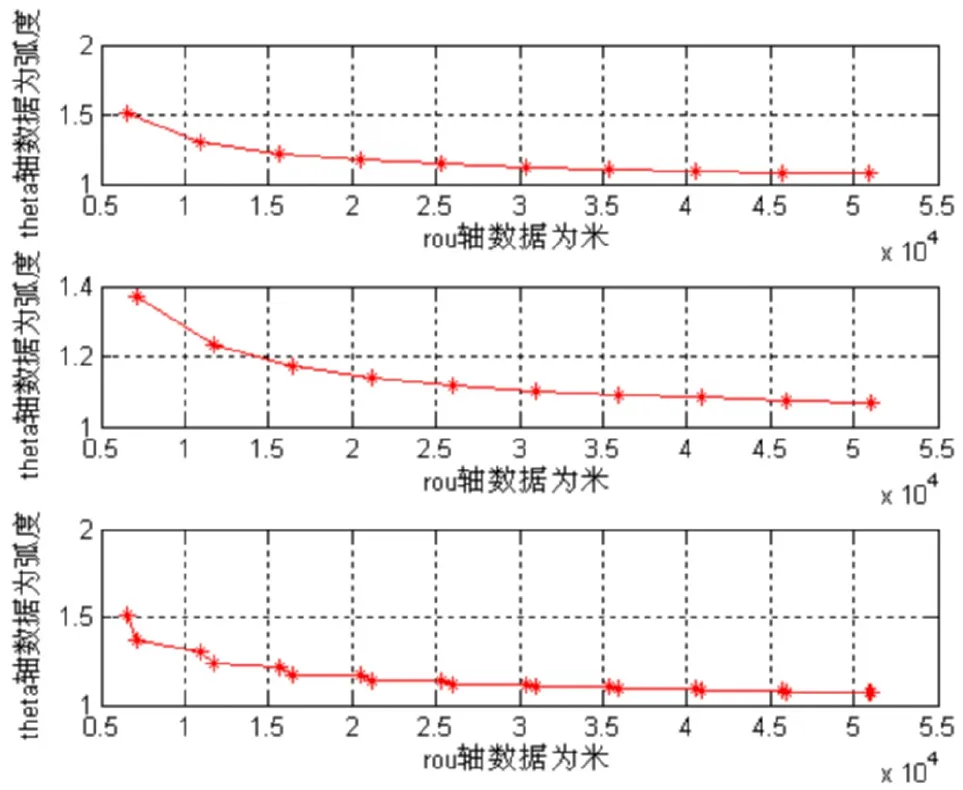
圖4 極坐標下顯示的仿真圖
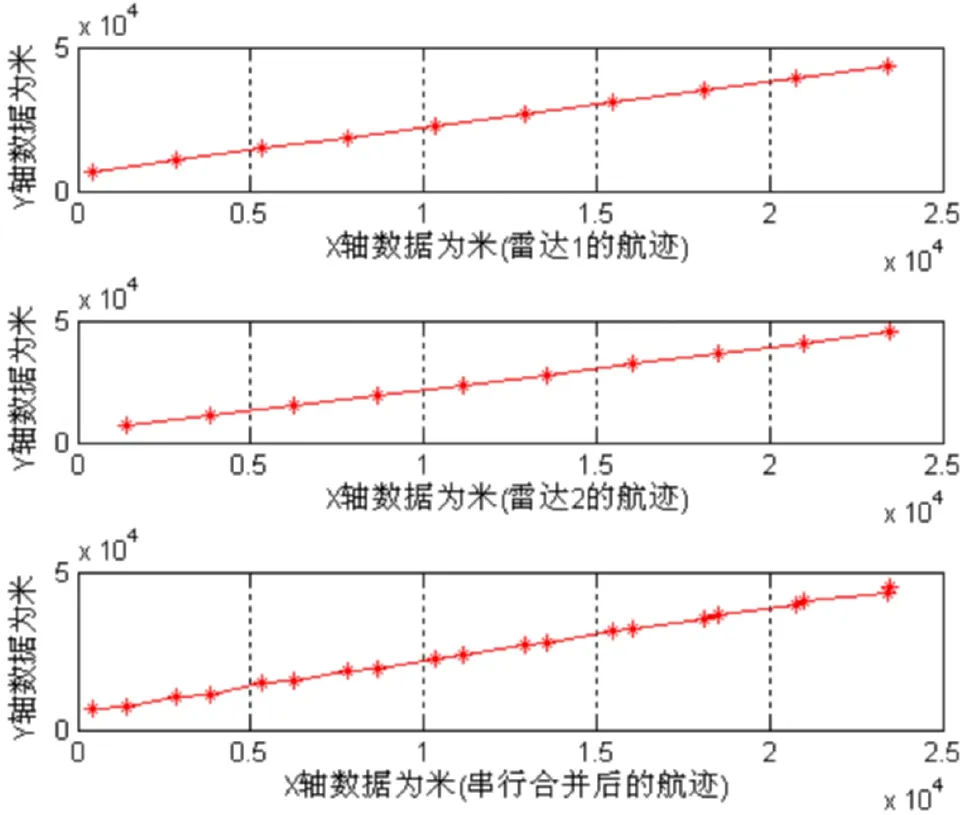
圖5 直角坐標下的仿真圖
比較測試一和測試二仿真圖我們可以看出周期的異同對串行合并航跡的影響。當兩部雷達(開機時間不同)掃描周期不同時,有可能在相同時刻探測到同一目標,合并后航跡圖上點的個數就小于兩部雷達航跡圖上點數之和,這樣探測精度就會降低,效果不是很好。而掃描周期相同時,則不會出現上述情況,跟蹤精度會提高。
采用不同坐標顯示:
測試一:在極坐標下顯示
測試二:在直角坐標下顯示
比較測試一和測試二仿真圖我們可以看出:在直角坐標下顯示,由于圖中數值較大不利于和初值進行比較,不夠直觀。而在極坐標下顯示,數值相對較小,易于和初值進行比較。所以用極坐標顯示效果比較好。
4 總結
本文主要是在集中式系統結構下研究組網雷達的數據融合算法,并通過仿真評估不同算法的效能:比較分析了串行合并式的仿真圖用何種坐標顯示較好。由于時間有限,本論文對許多其它情況沒有進行討論,例如在確定測角誤差不變的情況下,改變測距誤差的大小;或者在保持測距誤差不變的情況下,改變測角誤差的大小等情況的比較。
集中式多雷達數據融合技術已經在軍事領域得到廣泛應用,我相信隨著微電子、計算機等科學技術的不斷進步,集中式多雷達數據融合技術必將得到大力發展。
參考文獻
[1]劉福聲,羅鵬飛.統計信號處理[M].國防科技大學出版社,1999:190-195.
[2]楊萬海等.多傳感器數據融合及其應用[M].西安:西安電子科技大學出版社,2004:23-43.
[2]張威.MATLAB基礎與編程入門[M].西安:西安電子科技大學出版社,2004:2.
Research on centralized data fusion technology of Networking Radar
Wang Qian
(Unit 91245 of PLA,Huludao,125000)
Abstract:Radar network can from different angles of sea airspace detection,access to a range of data,using data fusion to improve the target detection ability.Centralized data processing method can be divided into tracks merge type and serial combined,this paper aiming at the problem of displaying the serial combination of coordinates were simulation analysis.
Keywords:Networking Radar;data fusion;centralized;serial combination