基于VNH2SP30全橋驅動器的直流電機控制系統設計
2016-07-04 00:26:22劉青峰王清亮四川壓電與聲光技術研究所重慶400060
電子測試 2016年9期
劉青峰,王清亮,劉 立(四川壓電與聲光技術研究所,重慶,400060)
?
基于VNH2SP30全橋驅動器的直流電機控制系統設計
劉青峰,王清亮,劉 立
(四川壓電與聲光技術研究所,重慶,400060)
摘要:采用VNH2SP30全橋驅動器設計了高集成度的PWM控制的電機控制系統,設計了電機電流檢測電路,并對檢測電路進行了Spice仿真分析,對電機控制系統進行了試驗,結果表明所設計的控制系統性能穩定,具有調速和方向控制、電流反饋控制的功能。
關鍵詞:VNH2SP30;全橋驅動器;電機控制
0 引言
有刷直流電機采用永磁體建立磁場,不需要勵磁電流,電機中省去了勵磁回路,具有啟動轉矩大、制動及時、控制電路相對簡單等特點,在伺服系統中永磁直流電機得到廣泛應用。本文設計了以VNH2SP30全橋驅動器為功率變換器件的直流電機控制系統,實現對直流電機轉速和轉矩的PWM控制,采用電機電流檢測電路判斷電機是否堵轉,給出了所設計的硬件電路,并進行了控制實驗,實驗結果表明所設計的控制系統具有良好的性能與實用。
1 系統組成與功能
有刷直流電機控制系統組成框圖如圖1,微控制器采用C8051F023混合信號單片機,具有10位SAR ADC用于電機電流數據采集,單片機生成PWM和電機方向控制指令。電機驅動器采用ST公司高集成度的VNH2SP30全橋驅動器,具有欠壓、過壓、過熱保護功能,具有電機電流比例感應輸出功能方便電流檢測,具有自身故障診斷功能,在單片機的控制下實現直流電機的加減速、正反轉、停轉。電流檢測電路將驅動器敏感到的電流放大到合適的電平輸入給ADC,單片機采集到ADC數據后對電機進行閉環控制。
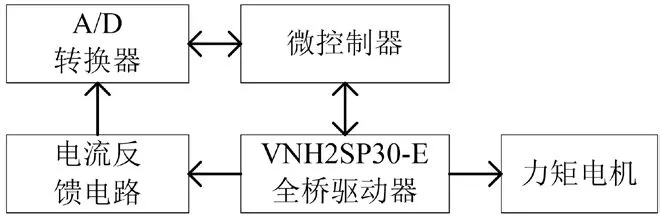
圖1 電機控制系統組成
2 系統硬件電路設計
2.1 電機驅動電路設計
采用VNH2SP30全橋驅動器設計的電機驅動電路如圖2。單片機輸出的指令信號控制電機驅動器驅動直流電機。電源電壓VCC為12V。INA與INB通過控制驅動器內部H橋功率MOSFET導通或截止來實現電機正轉與反轉。PWM控制信號頻率可達20KHz,通過改變占空比來控制電機的轉矩與轉速。ENA和ENB為驅動器的故障診斷輸出信號,驅動器正常工作時輸出高電平,驅動器異常時:過熱、輸出端與電源端或地短路時輸出低電平,當出現異常時,單片機通過監測ENA和ENB可以進行故障分析和定位。Q1為N溝道MOSFET,其柵極通過電阻R1連接至電源端,當加正向電壓時Q1導通,驅動器上電工作;在電源加反時Q1截止,起到保護驅動器的作用。OUTA 和OUTB 為驅動輸出端, 連接有刷直流電機的兩個驅動端, 輸出電流驅動電機工作。
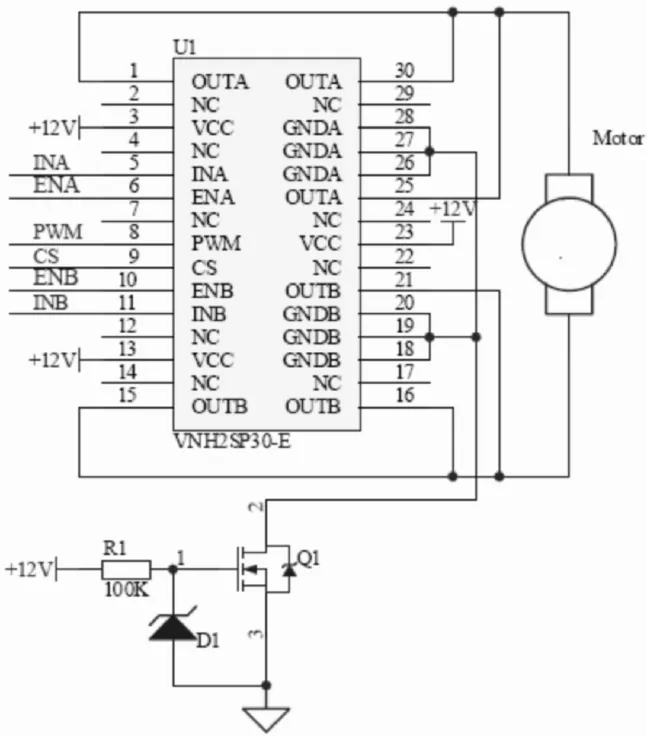
圖2 VNH2SP30-E電機驅動電路
2.2 電流檢測電路設計
通常電機電流檢測采用大功率電阻或霍爾傳感器串聯在電機回路中對電流進行檢測。VNH2SP30全橋電機驅動器的SC為與輸出電流成比例的感應電流輸出,電機電流與感應電流比例系數K約為11000。電流檢測電路如圖3所示,R1為采樣電阻。由于系統采用單電源+3.3V供電,選用的運算放大器為軌到軌輸出放大器,將第一級運算放大器的同相輸入端加上1.65V的偏置電壓,第一級放大倍數為-1倍,C2和R2組成低通濾波網絡濾除高頻噪聲。第二級采用輸出電阻低的電壓跟隨器電路用于驅動ADC。ADC采用單片機自身的10位SAR ADC用于電流數據采集。所用的電機額定電壓為12V,當電機正常運行時驅動電流為1.2A,CS腳輸出比例電流約為0.12mA;當電機堵轉時,電機驅動電流為5.8A,CS腳輸出比例電流約為0.58mA,通過A/D采樣監測到電機電流, 可以判斷電機是否處于堵轉。

圖3 電機電流監測電路
ADC采樣到的電壓值Vo與電機電流Io關系如下:
3 硬件仿真
為確定電流檢測電路參數是否合適,對電流檢測電路用PSpice進行了仿真。仿真條件為:電機正常運行時CS腳輸出比例電流為0.12mA,電機堵轉時CS腳輸出比例電流為0.58mA。仿真結果如下圖5,電機正轉時的波形為圖中下部的曲線,電機反轉時的波形為圖中上部的曲線,中間直線為1/2電源電壓值1.65V。從仿真結果可以看出,電流檢測電路輸出的電壓值在電源與地范圍內,沒有失真。
4 試驗結果
對所設計的電機控制系統進行加電測試,控制系統具有以下功能:
(1) PWM控制:微控制器輸出PWM控制信號,設定頻率為10KHz,通過調節占空比為0~100%,來控制電機的轉速和轉矩。
(2) 電機正反轉控制:INA=1,INB=0時電機正轉;INA=0,INB=1時電機反轉。
(3) 電機電流檢測:電機電流經過檢測電路轉化為電壓值輸入給ADC采樣,電機正轉、堵轉、反轉、堵轉工作過程的電流經檢測電路放大后的電壓信號如圖5,可以通過判斷電壓值的大小即電機電流的大小來判斷電機是否處于堵轉工作狀態。
在使用VNH2SP30驅動器時,需要注意以下方面:
(1) 驅動器的散熱問題。盡管驅動器有極低的導通電阻,如果散熱處理不當,在電流較大時驅動芯片也會發燙,建議參考數據手冊在電路板的頂層和底層加銅片進行散熱。
(2) 在電機啟動時,盡量使PWM的占空比較小,以免驅動芯片過流。
(3) 在電機啟動、堵轉、停止時會有較大的電流傳導干擾,有時甚至會造成單片機復位,可以通過合理的接地技術來減小干擾,也可以在單片機與驅動器、電機之間用光電隔離的方案來消除傳導性干擾。
(4) 驅動器的電源與地之間需要加一個大的去耦電容,10A的負載電流要求加500uF的電容,來為電機啟動和停止時儲存能量。
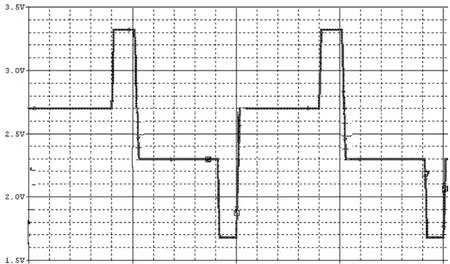
圖5 電機正轉、堵轉、反轉、堵轉工作過程的電壓信號
5 結論
基于VNH2SP30全橋驅動器的直流電機驅動系統,集成度高,具有欠壓、過壓、過熱、短路等保護功能,PWM調速方便、電機正反轉控制靈活,具有電機電流反饋控制功能,有良好的應用價值。
參考文獻
[1] (日)晶體管技術編輯部編,馬杰譯.小型直流電機控制電路設計[M].北京︰科學出版社,2012.
[2] 李艷文.基于VNH2SP30-E的電動車窗設計[J].汽車工程,2008,第30卷第4期:360-363.
[3]林家泉.一種小型直流電機控制系統硬件設計方案[J].自動化與儀表,2014,第11期:73-76.
[4] 侯清鋒.基于VNH3SP30的大電流直流電機驅動器的設計[J].微計算機信息,2007,第23卷第10-1期:92-94.
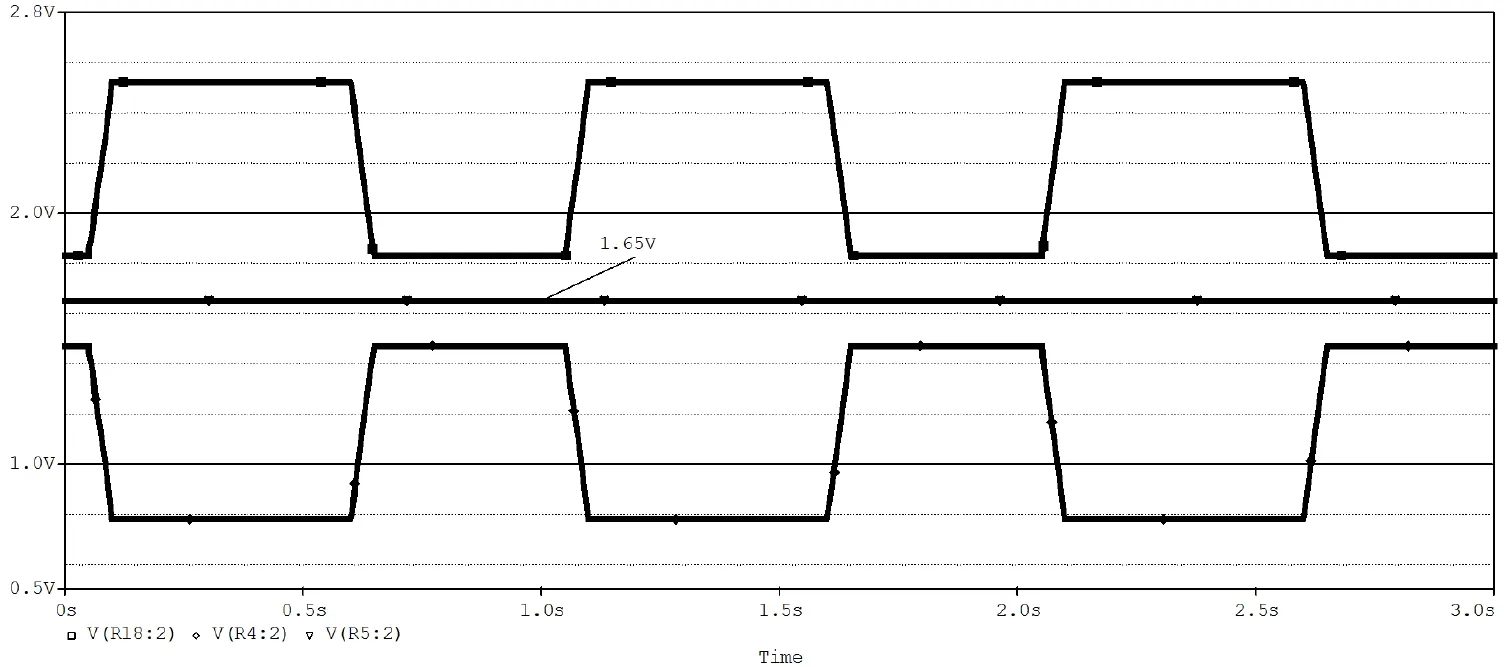
圖4 電機正轉、反轉電流檢測仿真結果
Design of DC motor control systems based on VNH2SP30 H-bridge motor driver
Liu qingfeng,Wang qingliang,Liu li
(Sichuan Institute of Piezoelectric & Acousto-optic Technology,Chongqing,400060,China)
Abstract:By using full bridge power driver VNH2SP30,it was designed a high integration motor control system controlled by PWM.The motor current detection circuit was also designed.The Spice was used to simulate and analyze the detection circuit.The motor control system was tested,and the experiment results showed that the system was stable,and had the function of speed and direction control,current feedback control.
Keywords:VNH2SP30; full bridge driver; motor control