一種VTS系統(tǒng)中CCTV對(duì)船舶跟蹤監(jiān)控方法
2016-07-01 08:43:34袁劍華邱明華
雷達(dá)與對(duì)抗 2016年2期
趙 航,李 棟,袁劍華,邱明華
(1.海軍駐南京地區(qū)雷達(dá)系統(tǒng)軍事代表室,南京 210003;2.中國(guó)船舶重工集團(tuán)公司第七二四研究所,南京 211153)
一種VTS系統(tǒng)中CCTV對(duì)船舶跟蹤監(jiān)控方法
趙航1,李棟2,袁劍華2,邱明華2
(1.海軍駐南京地區(qū)雷達(dá)系統(tǒng)軍事代表室,南京 210003;2.中國(guó)船舶重工集團(tuán)公司第七二四研究所,南京 211153)
摘要:VTS系統(tǒng)主要對(duì)港口水域內(nèi)的船舶進(jìn)行管理。對(duì)于重點(diǎn)船舶,當(dāng)船舶進(jìn)入通航管理的重點(diǎn)水域時(shí),不但要知道在哪兒,航速航向是多少,而且也需要對(duì)這類船舶進(jìn)行現(xiàn)場(chǎng)全程監(jiān)管,實(shí)現(xiàn)監(jiān)控?cái)z像機(jī)自動(dòng)全程跟蹤。本文提出一種綜合考慮水位、船舶位置、長(zhǎng)度、寬度、高度、吃水、航向、航速等多因素的CCTV對(duì)船舶跟蹤監(jiān)控方法。結(jié)果表明該方法可以實(shí)現(xiàn)CCTV對(duì)船舶的跟蹤監(jiān)控,并可以達(dá)到較好的監(jiān)控效果。
關(guān)鍵詞:VTS系統(tǒng);CCTV;跟蹤監(jiān)控
0引言
VTS系統(tǒng)(船舶交通導(dǎo)航系統(tǒng))包括雷達(dá)子系統(tǒng)、VHF子系統(tǒng)、AIS 子系統(tǒng)、CCTV子系統(tǒng)和數(shù)據(jù)庫(kù)子系統(tǒng)等。雷達(dá)子系統(tǒng)通過雷達(dá)掃描主動(dòng)對(duì)雷達(dá)所覆蓋區(qū)域的船舶位置和航行狀況進(jìn)行偵測(cè)。VHF子系統(tǒng)通過VHF通信系統(tǒng)對(duì)監(jiān)控區(qū)內(nèi)的重點(diǎn)船舶進(jìn)行人工標(biāo)識(shí)和跟蹤。AIS子系統(tǒng)通過安裝在船上的AIS船臺(tái)發(fā)出船舶的MMSI、經(jīng)緯度、航速、航向、船舶尺寸、船舶吃水等信息,由岸基AIS臺(tái)站接收船舶的AIS信息,實(shí)現(xiàn)對(duì)AIS船舶的跟蹤。CCTV子系統(tǒng)是以視頻攝錄為信息采集手段的直觀的現(xiàn)場(chǎng)監(jiān)管手段。雷達(dá)子系統(tǒng)對(duì)于一些特定的水域環(huán)境、特定的時(shí)段的監(jiān)控不便、監(jiān)控失效,而CCTV系統(tǒng)可以完成實(shí)時(shí)的監(jiān)控。因此,采用CCTV系統(tǒng)來進(jìn)行輔助監(jiān)控,彌補(bǔ)雷達(dá)監(jiān)控的不足[1-2]。數(shù)據(jù)庫(kù)子系統(tǒng)保存船舶的基本資料、船舶違章等信息。
對(duì)于重點(diǎn)船舶,如危險(xiǎn)品船舶、客輪、客滾輪和其他需要重點(diǎn)監(jiān)控的船舶,當(dāng)船舶進(jìn)入通航管理的重點(diǎn)水域時(shí),不但要知道在哪兒,航速航向是多少,而且也需要對(duì)這類船舶進(jìn)行現(xiàn)場(chǎng)全程監(jiān)管,實(shí)現(xiàn)監(jiān)控?cái)z像機(jī)自動(dòng)全程跟蹤,以確保這類船舶的航行安全。因此,實(shí)現(xiàn)CCTV對(duì)船舶跟蹤監(jiān)控是非常必要的[3]。
CCTV對(duì)船舶進(jìn)行跟蹤監(jiān)控,除了要保證被監(jiān)控船舶一直在監(jiān)控畫面中,還要保證算法能夠自適應(yīng)船舶的尺度變化[4]。本文提出一種VTS系統(tǒng)中綜合考慮水位、船舶位置、長(zhǎng)度、寬度、高度、吃水、航向、航速等多因素的CCTV對(duì)船舶跟蹤監(jiān)控方法,可以實(shí)現(xiàn)CCTV 對(duì)船舶的跟蹤監(jiān)控,并且保證在跟蹤監(jiān)控過程中不同大小、不同航向狀態(tài)的船舶在監(jiān)控畫面中所占的比例相同,達(dá)到較好的跟蹤監(jiān)控效果。
1原理
首先測(cè)量CCTV監(jiān)控點(diǎn)鏡頭的經(jīng)緯度和鏡頭距離水面的高度,從數(shù)據(jù)庫(kù)或AIS系統(tǒng)獲取被監(jiān)控船舶的高度、寬度和長(zhǎng)度信息,從AIS系統(tǒng)和雷達(dá)系統(tǒng)實(shí)時(shí)獲取被監(jiān)控船舶的經(jīng)緯度、航向、航速、吃水信息及數(shù)據(jù)生成時(shí)間。根據(jù)最新獲取的被監(jiān)控船舶的經(jīng)緯度、航向、航速及與數(shù)據(jù)生成時(shí)間,預(yù)測(cè)被監(jiān)控船舶當(dāng)前的經(jīng)緯度信息。根據(jù)預(yù)測(cè)得到的被監(jiān)控船舶當(dāng)前的經(jīng)緯度和監(jiān)控點(diǎn)鏡頭的經(jīng)緯度計(jì)算被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的水平偏轉(zhuǎn)角度及水平距離。根據(jù)被監(jiān)控船舶的高度和當(dāng)前時(shí)刻獲取的吃水信息計(jì)算被監(jiān)控船舶當(dāng)前的水面以上高度。再根據(jù)計(jì)算出的船舶當(dāng)前水面以上高度和監(jiān)控點(diǎn)鏡頭距離水面的高度、監(jiān)控點(diǎn)鏡頭在當(dāng)前方位的垂直偏轉(zhuǎn)角度、被監(jiān)控船舶到鏡頭的水平距離計(jì)算被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的垂直偏轉(zhuǎn)角度。根據(jù)被監(jiān)控船舶的長(zhǎng)度、寬度、航向及被監(jiān)控船舶當(dāng)前的水面以上高度、監(jiān)控點(diǎn)鏡頭到被監(jiān)控船舶的水平距離計(jì)算鏡頭監(jiān)控船舶需要的焦距值。最后控制云臺(tái)轉(zhuǎn)動(dòng)到上述計(jì)算出的水平偏轉(zhuǎn)角度和垂直偏轉(zhuǎn)角度,并通過云臺(tái)調(diào)節(jié)鏡頭至計(jì)算出的焦距值。重復(fù)上述步驟,實(shí)現(xiàn)CCTV對(duì)船舶的跟蹤監(jiān)控。該算法原理如圖1。
2工程實(shí)現(xiàn)
在VTS系統(tǒng)中,CCTV對(duì)船舶的跟蹤監(jiān)控通過以下多個(gè)步驟實(shí)現(xiàn):
(1) 鏡頭經(jīng)緯度和高度測(cè)量
通過儀器測(cè)量監(jiān)控點(diǎn)鏡頭的經(jīng)緯度和距離水面的高度,從海事服務(wù)網(wǎng)下載港口的潮汐表信息。從潮汐表中查詢測(cè)量時(shí)刻的潮位信息,以該潮位信息和測(cè)量的高度信息作為基準(zhǔn)潮位信息和基準(zhǔn)高度信息。
(2) 船舶高度、寬度、長(zhǎng)度等信息獲取
從船舶交通導(dǎo)航系統(tǒng)中的AIS系統(tǒng)獲取或通過MMSI、船名等從數(shù)據(jù)庫(kù)系統(tǒng)中查詢被監(jiān)控船舶的船舶高度、寬度和長(zhǎng)度信息。
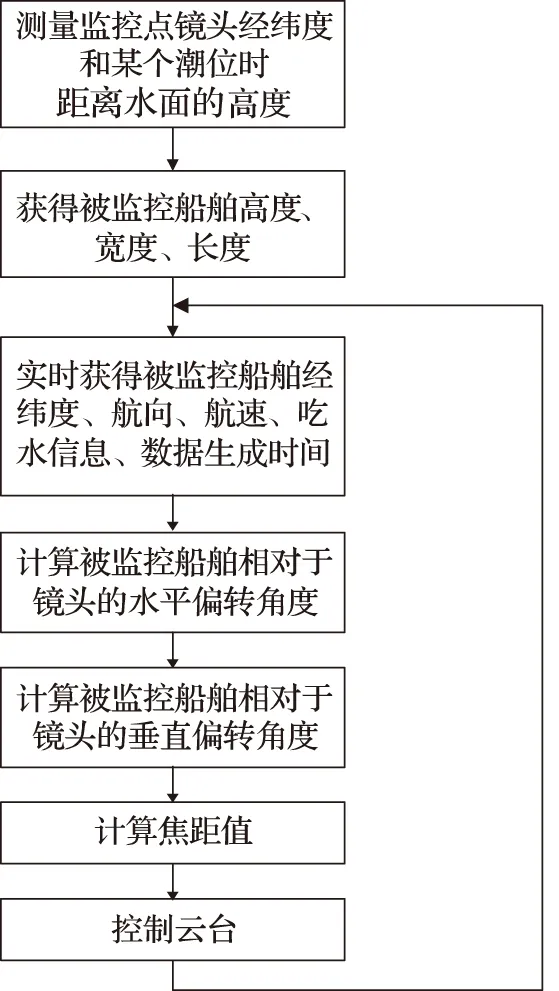
圖1 CCTV對(duì)船舶跟蹤監(jiān)控原理圖
(3) 船舶經(jīng)緯度等信息獲取
實(shí)時(shí)從船舶交通導(dǎo)航系統(tǒng)中的AIS系統(tǒng)或雷達(dá)系統(tǒng)中獲取被監(jiān)控船舶的經(jīng)緯度、航向、航速、轉(zhuǎn)向率及數(shù)據(jù)生成時(shí)間信息,從AIS系統(tǒng)或數(shù)據(jù)庫(kù)系統(tǒng)獲取船舶吃水信息。
(4) 水平偏轉(zhuǎn)計(jì)算
提取最新獲取的被監(jiān)控船舶的經(jīng)緯度、航向、航速、轉(zhuǎn)向率及與數(shù)據(jù)生成時(shí)間,預(yù)測(cè)得到被監(jiān)控船舶當(dāng)前位置的經(jīng)緯度;由被監(jiān)控船舶當(dāng)前位置的經(jīng)緯度和監(jiān)控點(diǎn)鏡頭的經(jīng)緯度計(jì)算被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的水平偏轉(zhuǎn)角度及水平距離。
(5) 垂直偏轉(zhuǎn)計(jì)算
垂直偏轉(zhuǎn)包括兩部分,一部分是船舶當(dāng)前位置相對(duì)于鏡頭的垂直偏轉(zhuǎn),一部分是在具體工程實(shí)施過程中由于云臺(tái)和鏡頭安裝不水平等原因造成的鏡頭在該水平角度的垂直偏轉(zhuǎn)。
?船舶相對(duì)于鏡頭的垂直偏轉(zhuǎn)
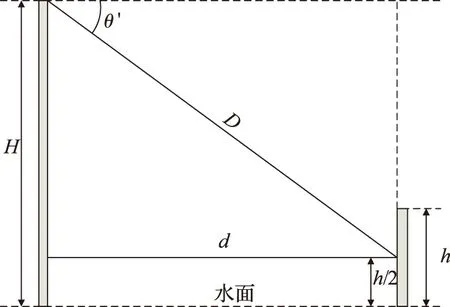
從港口潮汐表中查詢當(dāng)前時(shí)刻港口的潮位信息。根據(jù)當(dāng)前的潮位信息、基準(zhǔn)潮位信息和基準(zhǔn)高度信息計(jì)算出當(dāng)前時(shí)間段監(jiān)控點(diǎn)鏡頭距離水面的高度。再根據(jù)被監(jiān)控船舶當(dāng)前的水面以上高度和監(jiān)控點(diǎn)鏡頭距離水面的高度、被監(jiān)控船舶到鏡頭的水平距離計(jì)算被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的垂直偏轉(zhuǎn)角度。計(jì)算方法是:設(shè)監(jiān)控點(diǎn)鏡頭距離水面的高度為H,被監(jiān)控船舶當(dāng)前的水面以上高度為h(被監(jiān)控船舶的高度減去船舶當(dāng)前吃水),被監(jiān)控船舶到監(jiān)控點(diǎn)鏡頭的水平距離為d,并設(shè)定系數(shù)n,如圖2所示。被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的垂直偏轉(zhuǎn)角度θ的計(jì)算公式為

(1)
(2)
式中,垂直偏轉(zhuǎn)角度θ取反表示是向下偏轉(zhuǎn)。由h/n控制鏡頭的監(jiān)控畫面中心指向船舶垂直方向的部分,n可取0 當(dāng)系數(shù)n取值為2時(shí),被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的垂直偏轉(zhuǎn)角度θ的計(jì)算公式為 (3) 在此狀態(tài)下,監(jiān)控點(diǎn)鏡頭的監(jiān)控畫面中心指向船舶垂直方向中心,具有較好的監(jiān)控效果。 圖2 垂直偏轉(zhuǎn)角度計(jì)算示意圖 ?鏡頭在該水平角度的垂直偏轉(zhuǎn) 垂直偏轉(zhuǎn)主要是由于云臺(tái)不水平造成的。當(dāng)鏡頭轉(zhuǎn)動(dòng)到不同的水平角度時(shí),該偏轉(zhuǎn)值不同。設(shè)鏡頭在該水平角度的垂直偏轉(zhuǎn)為β,則β的計(jì)算公式為 (4) 式中,β1表示由于云臺(tái)不水平造成的鏡頭在轉(zhuǎn)動(dòng)過程中相對(duì)于水平面的最大夾角,γ0表示當(dāng)鏡頭轉(zhuǎn)動(dòng)到與水平面夾角為0時(shí)的水平角度,γ表示鏡頭轉(zhuǎn)動(dòng)過程中實(shí)時(shí)的水平角度。β1和γ0都是未知參數(shù)。在實(shí)際工程實(shí)施中,監(jiān)控2個(gè)不同位置的目標(biāo),調(diào)整到最佳監(jiān)控效果時(shí)查看對(duì)應(yīng)的2個(gè)β和γ值,解方程就可以求出β1和γ0值。 綜合考慮以上兩部分,垂直偏轉(zhuǎn)的計(jì)算公式為 (5) 在上述公式中,使用的水平角度值都是以正北方向?yàn)閰⒖?°,順時(shí)針方向?yàn)檎慕嵌戎怠T婆_(tái)有自己的坐標(biāo)系。通常情況下,云臺(tái)的0°與正北方向不一致,但之間的夾角很容易測(cè)試計(jì)算出來。實(shí)際工程實(shí)施中,通過旋轉(zhuǎn)實(shí)現(xiàn)坐標(biāo)轉(zhuǎn)換。 (6) 焦距值計(jì)算 根據(jù)所獲得的被監(jiān)控船舶的長(zhǎng)度、寬度、航向及被監(jiān)控船舶當(dāng)前的水面以上高度、監(jiān)控點(diǎn)鏡頭到被監(jiān)控船舶的水平距離計(jì)算獲得鏡頭監(jiān)控船舶需要的焦距值。計(jì)算方法是:首先計(jì)算船舶在鏡頭中的切向投影長(zhǎng)度,設(shè)步驟(4)中計(jì)算出的被監(jiān)控船舶相對(duì)于監(jiān)控點(diǎn)鏡頭的水平偏轉(zhuǎn)角度為γ′,船舶的航向?yàn)棣?船舶船長(zhǎng)為l,則船舶在鏡頭中的切向投影長(zhǎng)度為 (6) 當(dāng)被監(jiān)控船舶航向不同時(shí),被監(jiān)控船舶在監(jiān)控點(diǎn)鏡頭中的投影長(zhǎng)度有所不同。被監(jiān)控船舶正常航行時(shí),船身的方向與航向是一致的。當(dāng)被監(jiān)控船舶沿監(jiān)控點(diǎn)鏡頭的切向方向行駛時(shí),被監(jiān)控船舶在監(jiān)控點(diǎn)鏡頭中的投影長(zhǎng)度為船舶長(zhǎng)度。當(dāng)被監(jiān)控船舶沿鏡頭徑向方向行駛時(shí),被監(jiān)控船舶在監(jiān)控點(diǎn)鏡頭中的投影長(zhǎng)度為船舶寬度。設(shè)船寬為w,被監(jiān)控船舶在鏡頭中的投影長(zhǎng)度L的計(jì)算公式如下: (7) 設(shè)鏡頭當(dāng)前距離水面的高度為H,船舶當(dāng)前水面以上高度為h,船舶到鏡頭的水平距離為d,并設(shè)定系數(shù)n,則船舶到鏡頭的實(shí)際距離D的表達(dá)式為 (8) 式中系數(shù)n可取0 根據(jù)被監(jiān)控船舶在監(jiān)控點(diǎn)鏡頭中的實(shí)際投影長(zhǎng)度L和被監(jiān)控船舶當(dāng)前的水面以上高度h,分別計(jì)算兩個(gè)焦距值f1和f2: f1=vD/L (9) f2=uD/h (10) 式中,v表示圖像的寬度,即被監(jiān)控船舶在ccd靶面上成像寬度;u表示圖像的高度,即被監(jiān)控船舶在ccd靶面上成像高度。 為了保證在監(jiān)控點(diǎn)鏡頭的監(jiān)控圖像中可以看到完整的船舶圖像,實(shí)際的焦距值取兩個(gè)焦距值中的較小值。雷達(dá)、AIS系統(tǒng)在探測(cè)船舶位置時(shí)都有誤差。根據(jù)航向、航速、轉(zhuǎn)向率及與數(shù)據(jù)生成時(shí)間預(yù)測(cè)被監(jiān)控船舶當(dāng)前位置時(shí)也會(huì)有誤差,而且云臺(tái)有指示和控制精度誤差。所以,在計(jì)算焦距時(shí)增加一個(gè)可配置參數(shù)p,在實(shí)際工程實(shí)施中,通過多次測(cè)試為該參數(shù)設(shè)置一個(gè)較優(yōu)值,焦距f的表達(dá)式為 f=min(f1,f2)-p (11) (7) 云臺(tái)控制 控制云臺(tái)轉(zhuǎn)動(dòng)到步驟(4)計(jì)算出的水平偏轉(zhuǎn)角度和步驟(5)計(jì)算出的垂直偏轉(zhuǎn)角度,并通過云臺(tái)調(diào)節(jié)鏡頭至步驟(6)計(jì)算出的焦距值。 重復(fù)上述步驟,實(shí)現(xiàn)CCTV監(jiān)控點(diǎn)鏡頭對(duì)船舶的跟蹤監(jiān)控。 3結(jié)束語 本文提出了一種船舶交通導(dǎo)航系統(tǒng)中CCTV對(duì)船舶跟蹤監(jiān)控方法,重點(diǎn)在于在監(jiān)控過程中綜合考慮了潮位、船舶的經(jīng)緯度、航向、航速、船舶長(zhǎng)度、寬度、高度、吃水等信息,實(shí)現(xiàn)了CCTV對(duì)船舶的跟蹤監(jiān)控,并且在跟蹤監(jiān)控過程中不同大小、不同航向的船舶在監(jiān)控畫面中所占的比例相同。目前,采用上述方法的CCTV對(duì)船舶跟蹤監(jiān)控系統(tǒng)已經(jīng)在多個(gè)海事交通管理系統(tǒng)中得到應(yīng)用,并取得了較好的跟蹤監(jiān)控效果。 參考文獻(xiàn): [1]龔瑞卿.AIS、CCTV、VTS整合功能擴(kuò)展[J].中國(guó)水運(yùn),2005(10):44-45. [2]郭寶云.CCTV系統(tǒng)目標(biāo)定位與跟蹤技術(shù)改進(jìn)方法的研究[D].大連海事大學(xué),2012. [3]肖飛.目標(biāo)聯(lián)動(dòng)CCTV系統(tǒng)主控中心軟件的研究[D].大連海事大學(xué),2008. [4]騰飛,劉清,朱琳.一種快速魯棒的內(nèi)河CCTV系統(tǒng)船舶跟蹤算法[J].武漢理工大學(xué)學(xué)報(bào),2014(5):80-85. A ship tracking and monitoring method with CCTV in VTS system ZHAO Hang1, LI Dong2, YUAN Jian-hua2, QIU Ming-hua2 (1. Military Representative Office of Radar System of the PLA Navy in Nanjing, Nanjing 210003;2. No.724 Research Institute of CSIC, Nanjing 211153) Abstract:The VTS system is mainly in charge of the vessel management within the port waters. For key ships, when they enter the key waters of navigation management, it is required that their positions, speed and heading should be known and superintended on site all the time, realizing automatic tracking and monitoring with cameras. A ship tracking and monitoring method with the CCTV is proposed, taking the water level, ship's position, length, width, height, draft, heading, speed and other factors into consideration. The results indicate that this method can realize ship tracking and monitoring with the CCTV with good monitoring effect. Keywords:VTS system; CCTV; tracking and monitoring 收稿日期:2016-03-28;修回日期:2016-04-03 作者簡(jiǎn)介:趙航(1989-),男,助理工程師,研究方向:雷達(dá)工程;李棟(1985-),男,工程師,碩士,研究方向:雷達(dá)數(shù)據(jù)處理;袁劍華(1984-),男,工程師,碩士,研究方向:雷達(dá)綜合識(shí)別;邱明華(1984-),女,工程師,碩士,研究方向:科技情報(bào)研究。 中圖分類號(hào):U666 文獻(xiàn)標(biāo)志碼:A 文章編號(hào):1009-0401(2016)02-0012-03