一種基于服務器平臺的雷達解模糊工程設計方法
2016-06-30 13:09:21陸逸
科技視界 2016年15期
陸逸
【摘 要】針對PD雷達解模糊,給出了一種基于國產化服務器平臺的解模糊設計方法。在傳統(tǒng)解模糊算法的基礎上作了一些改進,提高了算法效率。給出了解模糊模塊的軟件實現(xiàn)流程圖,實際工程應用驗證了算法的可行性。
【關鍵詞】脈沖多普勒雷達;解模糊;國產服務器平臺
0 引言
雷達裝備作為承擔重要任務的國防武器裝備,其核心及重要部件國產化是大勢所趨。服務器平臺擁有存儲內存大,計算內核多等優(yōu)點,在這種平臺下利用成熟的軟件設計理念進行雷達軟件化設計也變得方便可行。軟件化雷達可以通過軟件快速開發(fā)雷達系統(tǒng),并靈活地實現(xiàn)系統(tǒng)資源配置、功能擴展和性能提升,以滿足實際應用需求。本文重點介紹在多核多線程并行處理軟件化雷達架構下解模糊模塊的工程設計。
脈沖多普勒(PD)技術具有良好的雜波抑制性能,在雷達上尤其在機載雷達上得到了越來越廣泛的應用。解模糊技術是PD 雷達的關鍵技術,采用合理而快速的算法對保證目標的檢測概率和降低虛警率都有重要意義。對于中重頻PD雷達,既有距離模糊又有速度模糊問題。下面本文重點闡述解距離模糊和解速度模糊的算法設計。
1 解距離模糊
1.1 基本原理
解距離模糊指雷達用多個重頻探測目標,得到多個探測距離,在這些模糊距離中通過算法獲取一個真實距離。假設有N種重復周期進行距離測量,它們的距離單元數(shù)分別為R1,…,Rn,目標對應的各個視在距離單元分別為r1,…,rn,。若測量沒有誤差, 則目標所在的真實距離單元為:
R=K1×R1+r1=…=Kn×Rn+rn(1)
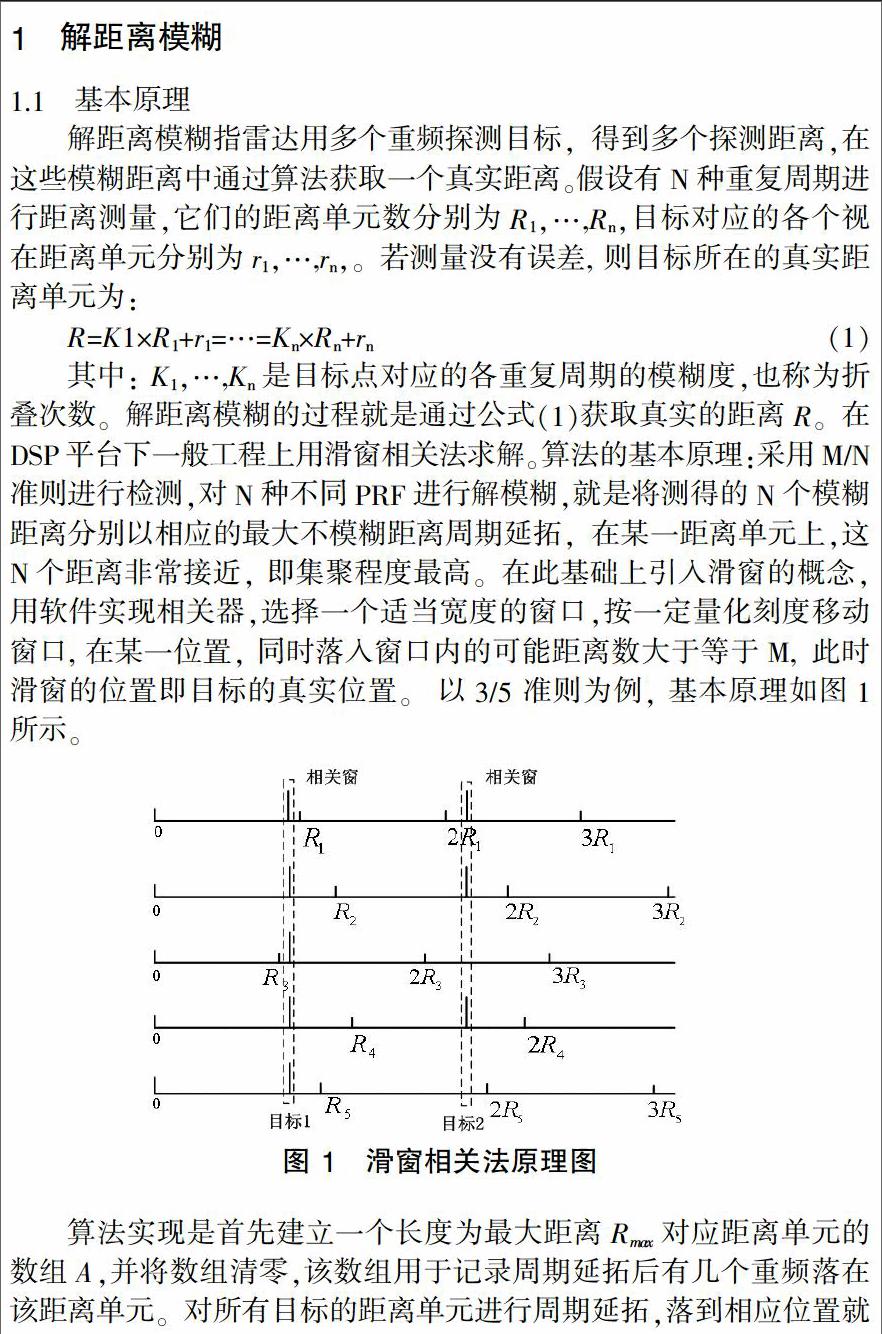
其中: K1,…,Kn是目標點對應的各重復周期的模糊度,也稱為折疊次數(shù)。解距離模糊的過程就是通過公式(1)獲取真實的距離R。在DSP平臺下一般工程上用滑窗相關法求解。算法的基本原理:采用M/N準則進行檢測,對N種不同PRF進行解模糊,就是將測得的N個模糊距離分別以相應的最大不模糊距離周期延拓,在某一距離單元上,這 N個距離非常接近, 即集聚程度最高。在此基礎上引入滑窗的概念,用軟件實現(xiàn)相關器,選擇一個適當寬度的窗口,按一定量化刻度移動窗口, 在某一位置, 同時落入窗口內的可能距離數(shù)大于等于M,此時滑窗的位置即目標的真實位置。 以3/5 準則為例, 基本原理如圖1 所示。
算法實現(xiàn)是首先建立一個長度為最大距離Rmax對應距離單元的數(shù)組A,并將數(shù)組清零,該數(shù)組用于記錄周期延拓后有幾個重頻落在該距離單元。對所有目標的距離單元進行周期延拓,落到相應位置就將數(shù)組內計數(shù)加1,如果在N個重頻中相應位置計數(shù)大于等于M則取出該距離單元作為解算結果。同時將多重頻數(shù)據(jù)與下一個波位的數(shù)據(jù)進行滑窗處理。
該算法需對相關數(shù)組進行清零和滑窗位操作,且需要對每個目標進行周期擴延,當目標數(shù)量多,雷達量程大的情況下計算量較大。為減少計算量,本文提出一種求余檢測法。
1.2 求余檢測法
求余檢測法采用與滑窗相關法相反的思維方式:將真實距離單元映射到每個重頻上,然后判斷該距離單元是否為過門限目標,如滿足M / N的檢測準則就輸出當前真實距離單元。得益于服務器較大的存儲內存,我們可以將信號處理CFAR的結果完整的傳輸?shù)胶蠖耍谧鼋饽:\算時只需要移動指針就可獲取某距離單元的信息,包括過門限標志。求余檢測法的步驟:
(a)將第i個距離單元對折疊距離進行求余計算:
r1=mod(Ri,R1)
…(2)
rn=mod(Rn,Rn)
其中,Ri是當前遍歷的距離單元,R1是第一個重頻對應的折疊距離。獲取距離單元號r1。Rn是第N個重頻對應的折疊距離。獲取距離單元號rn。
(b)將當前重頻數(shù)據(jù)的初始指針加上r1,判斷對應的幅度是否過門限,如是過門限數(shù)據(jù)則將計數(shù)加1,重復(a)步驟遍歷N個重頻。
(c)判斷當前計數(shù)器是否大于等于M,如果大于等于M,則輸出當前距離單元。繼續(xù)回到步驟(a)遍歷完所有距離單元。
2 解速度模糊
解速度模糊的原理與距離模糊類似,假設有N個重頻測量速度,它們的頻道數(shù)為F1,…,F(xiàn)n,頻道寬度分別為P1,…,Pn,目標對應的各視在頻道號為f1,…,fn。目標的真實多普勒頻移為:
F=K1×F1×P1+f1×P1
=…
=Kn×Fn×Pn+fn×Pn(3)
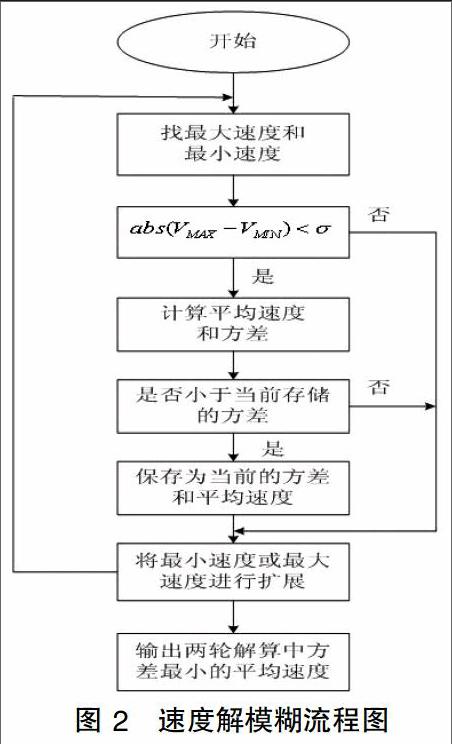
其中,K1,…,Kn,為目標點對應的各重頻的模糊度。多普勒頻率與速度可以通過公式相互轉換。在解速度模糊之前PD雷達先進行MTD 檢測,之后進行CFAR 處理,處理后得到目標點的信息,其中包括視在距離單元號和頻道號,過門限標志等信息。在解模糊之前先進行頻道選大,中重頻率的PD雷達存在距離和速度雙重模糊,解距離模糊完成后記錄下速度信息, 程序便轉入解速度模糊。本文采取循環(huán)擴展最小方差選取法求解真實速度,其流程圖如圖2所示。
首先距離解模糊后獲取了參與速度解模糊的重頻速度信息,找出最大速度和最小速度求其差的絕對值,如果它們的差小于誤差范圍則認為這組速度無模糊或者己解出速度,其中的值根據(jù)實際情況設置,本工程設置為5m/s;如果兩者的差大于,就將最小速度加上其折疊速度,然后繼續(xù)上述過程直到所有速度都在誤差范圍內則求出這組速度的平均速度和方差。這個過程為正向擴展,循環(huán)擴展速度直到速度到達雷達測量的最大正向速度,本輪解模糊結束。然后再進行反向擴展,即將最大速度減去折疊速度,直到雷達的最大負向速度為止。將兩輪解速度模糊中方差最小的那組速度的平均速度作為最終解速度的結果。
3 結束語
本文針對中重頻雷達距離解模糊和速度解模糊,采用了一種新的設計思路,并在國產化服務器平臺上實現(xiàn)。服務器平臺較大的運行內存和多核多線程并行處理的程序設計提供了強大的處理能力,能夠滿足雷達信號實時處理的應用需求。本文的設計方法改進了傳統(tǒng)的解模糊算法,其中距離解模糊方法只與雷達處理的量程有關而與過門限的目標數(shù)量無關,提高了解算效率。經(jīng)過實際工程驗證,本文的設計達到了良好的解模糊效果。
【參考文獻】
[1]曾濤,龍騰.一種脈沖多普勒雷達解模糊新算法[J].電子學報,2000.12:443-451.
[2]張代忠,洪一,邱煒.脈沖多普勒雷達中的解模糊算法及實現(xiàn)[J].雷達科學與技術,2004,10:Vol2,No5.
[3]雷火明,林強,陶雪峰,黃文韜.一種解模糊算法在地面PD體制雷達中的應用[J].空軍雷達學院學報,2009.8:Vol23,No4.
[4]劉慶云,曹菲.兩種解模糊方法解模糊能力比較[J].制導與引信,2012.12:Vol33, No4.
[責任編輯:王偉平]
