固定翼無人機(jī)定點(diǎn)飛行最優(yōu)路徑選擇
2016-06-27 06:39:13梁爽
自動(dòng)化儀表 2016年5期
關(guān)鍵詞:模型
梁 爽
(大連大學(xué)電子信息工程學(xué)院,遼寧 大連 116622)
固定翼無人機(jī)定點(diǎn)飛行最優(yōu)路徑選擇
梁爽
(大連大學(xué)電子信息工程學(xué)院,遼寧 大連116622)
摘要:針對(duì)固定翼無人機(jī)路徑規(guī)劃復(fù)雜、航跡冗余、偏離度高等特點(diǎn),通過建立三維空間空氣動(dòng)力學(xué)模型,標(biāo)定預(yù)置坐標(biāo),根據(jù)常規(guī)氣動(dòng)布局下的空氣動(dòng)力學(xué)原理、PID算法、環(huán)境等因素對(duì)航跡網(wǎng)格點(diǎn)進(jìn)行管理。采用改進(jìn)的動(dòng)態(tài)規(guī)劃算法,對(duì)如何準(zhǔn)確、快速地計(jì)算出連貫預(yù)定坐標(biāo)的最佳路徑進(jìn)行了研究。飛控計(jì)算機(jī)通過動(dòng)態(tài)對(duì)比、狀態(tài)預(yù)測(cè)算法,對(duì)路徑進(jìn)行實(shí)時(shí)對(duì)比、矯正、重新規(guī)劃,使無人機(jī)能沿著貫穿預(yù)定坐標(biāo)的最佳路徑完成既定飛行任務(wù)。
關(guān)鍵詞:無人機(jī)固定翼航跡優(yōu)化最優(yōu)路徑預(yù)定坐標(biāo)空氣動(dòng)力學(xué)模型PID狀態(tài)預(yù)測(cè)動(dòng)態(tài)對(duì)比
0引言
無人機(jī)執(zhí)行任務(wù)時(shí),通常伴隨著復(fù)雜的航跡變化。能源限制使得滯空時(shí)間變得相對(duì)固定,最大限度地優(yōu)化航跡可以大幅度延長(zhǎng)執(zhí)行任務(wù)時(shí)間,所以無人機(jī),尤其是小型無人機(jī)對(duì)于航跡的優(yōu)化有著迫切的需求。隨著傳感器工藝的發(fā)展,傳感器愈發(fā)趨于多元化、小型化、高精化,使得對(duì)無人機(jī)飛行時(shí)的位置、姿態(tài)信息能夠精確掌握。同時(shí)中央處理器處理能力的提升,也為無人機(jī)最優(yōu)航跡的即時(shí)計(jì)算提供可能。飛行前,地面控制站給出空中預(yù)定坐標(biāo),并結(jié)合飛機(jī)的機(jī)動(dòng)能力、空氣動(dòng)力學(xué)模型計(jì)算最佳航跡[1]。在飛行過程中,隨著環(huán)境因素的改變,實(shí)際飛行路徑或存在誤差。通過動(dòng)態(tài)對(duì)比算法[2]、狀態(tài)預(yù)測(cè)算法對(duì)無人機(jī)航跡進(jìn)行實(shí)時(shí)調(diào)整,可大幅度精簡(jiǎn)無人機(jī)飛行路徑,延長(zhǎng)執(zhí)行任務(wù)時(shí)間。
1最佳路徑選定
1.1無人機(jī)模型
無人機(jī)的空氣動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)模型[3]如圖1所示。

圖1 無人機(jī)模型
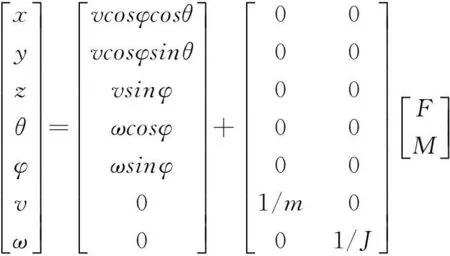
(1)
式中:(x,y,z)為慣性坐標(biāo)系下飛機(jī)的位置;θ為航向角;φ為俯仰角;v為速度;ω為角速度;m為質(zhì)量;J為轉(zhuǎn)動(dòng)慣量;F為控制力;M為控制力矩[4]。
1.2路徑描述
飛機(jī)與下一個(gè)參考點(diǎn)保持一個(gè)相對(duì)距離,飛機(jī)運(yùn)動(dòng)過程保持期望的路徑運(yùn)動(dòng)[5]。該路徑由參數(shù)ψ表示:Pd(ψ)=[ xd(ψ),yd(ψ),zd(ψ)]。路徑上每一點(diǎn)都有一個(gè)給定的速度vs(ψ),如圖2所示。
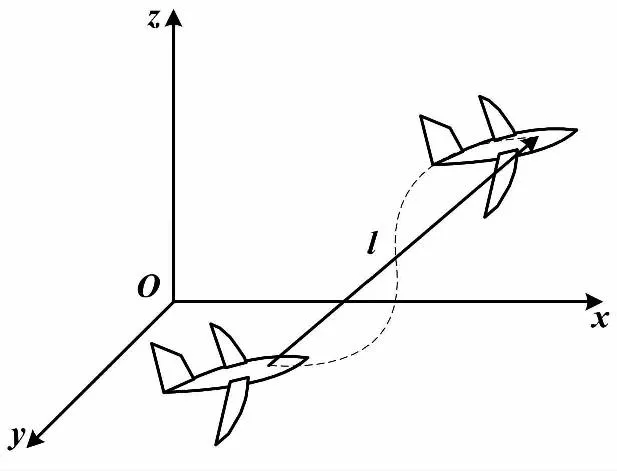
圖2 飛行路徑示意圖
無人機(jī)的期望路徑為:
Pd= Pd(ψ)+R[θd(ψ),φd(ψ)]l
(2)
式中:Pd(ψ)為飛機(jī)對(duì)ψ的信息;R[θd(ψ)φd(ψ)]為由無人機(jī)的體坐標(biāo)系到慣性坐標(biāo)系的轉(zhuǎn)換矩陣。
(3)

為了檢驗(yàn)期望路徑的準(zhǔn)確性,通過給定若干個(gè)坐標(biāo)點(diǎn),根據(jù)上述公式計(jì)算出期望路徑,并與軟件仿真路徑作對(duì)比,如圖3所示。
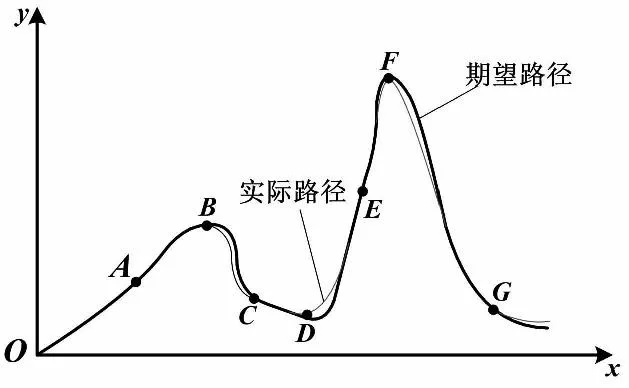
圖3 實(shí)驗(yàn)仿真圖
由圖3可以看出,通過計(jì)算得到的期望路徑,基本與軟件仿真路徑相重合,表明了本文建立的模型以及路徑跟蹤算法的有效性。
2硬件結(jié)構(gòu)
硬件系統(tǒng)主要包括無人機(jī)地面控制站、無人機(jī)平臺(tái)、飛控系統(tǒng)、傳感器、動(dòng)力系統(tǒng)、伺服系統(tǒng)、任務(wù)載荷[7],硬件結(jié)構(gòu)如圖4所示。

圖4 硬件結(jié)構(gòu)圖
無人機(jī)平臺(tái)起飛前,由地面控制站根據(jù)預(yù)置坐標(biāo)計(jì)算初始最優(yōu)路徑,并將預(yù)置坐標(biāo)、初始最佳路徑、任務(wù)數(shù)據(jù)發(fā)送至位于無人機(jī)平臺(tái)上的飛控系統(tǒng)。無人機(jī)升空后,飛控系統(tǒng)讀取傳感器數(shù)據(jù),確定無人機(jī)位置、姿態(tài),并通過控制動(dòng)力系統(tǒng)、伺服系統(tǒng),實(shí)現(xiàn)對(duì)最佳路徑的跟蹤。當(dāng)飛機(jī)大幅度偏離最佳路徑時(shí),飛控計(jì)算機(jī)對(duì)已通過的預(yù)置坐標(biāo)比對(duì),并基于當(dāng)前位置計(jì)算出貫穿剩余預(yù)置坐標(biāo)的最優(yōu)路徑[8]。
3軟件結(jié)構(gòu)
通過軟件控制,實(shí)現(xiàn)對(duì)無人機(jī)空中最優(yōu)路徑的跟蹤與重新計(jì)算。軟件系統(tǒng)包括地面控制站軟件與無人機(jī)平臺(tái)軟件。地面控制站軟件流程如圖5所示。

圖5 地面控制站軟件流程圖
啟動(dòng)地面控制站后,操控員輸入任務(wù)指令和預(yù)置坐標(biāo),地面控制站自動(dòng)計(jì)算出初始最優(yōu)路徑;控制站向無人機(jī)發(fā)送自檢命令,如果無人機(jī)自檢未通過,則地面控制站顯示故障位置后結(jié)束任務(wù)規(guī)劃操作;自檢通過后,控制站向無人機(jī)發(fā)送任務(wù)指令、預(yù)置坐標(biāo)、初始最優(yōu)路徑。若未發(fā)送成功,將再次發(fā)送自檢指令;發(fā)送成功后,控制站發(fā)送起飛指令,無人機(jī)升空,任務(wù)規(guī)劃完成。無人機(jī)平臺(tái)軟件流程如圖6所示。

圖6 無人機(jī)平臺(tái)軟件流程圖
無人機(jī)系統(tǒng)上電,收到地面控制站的自檢指令后開始自檢;若未通過,則上傳故障位置。通過自檢后,無人機(jī)接收任務(wù)指令、預(yù)置坐標(biāo)、最優(yōu)路徑。若接收失敗,則上傳失敗標(biāo)志;若接收成功,無人機(jī)平臺(tái)在接收到地面控制站的起飛命令后升空?qǐng)?zhí)行任務(wù)。起飛后,無人機(jī)通過姿態(tài)控制跟蹤最優(yōu)路徑。若偏離最優(yōu)路徑,則基于當(dāng)前位置計(jì)算出貫穿剩余預(yù)置坐標(biāo)的最優(yōu)路徑。到達(dá)任務(wù)區(qū)域后,無人機(jī)平臺(tái)打開任務(wù)系統(tǒng),在任務(wù)執(zhí)行完畢后,無人機(jī)返航。
4結(jié)束語
本文提出的無人機(jī)固定翼無人機(jī)空中定點(diǎn)飛行最優(yōu)路徑選擇方法,通過快速建立三維空間中空氣動(dòng)力學(xué)模型、標(biāo)定預(yù)置坐標(biāo),并根據(jù)費(fèi)馬原理和改進(jìn)的動(dòng)態(tài)規(guī)劃方法,計(jì)算出執(zhí)行任務(wù)的最優(yōu)路徑,能夠有效延長(zhǎng)執(zhí)行任務(wù)時(shí)間。同時(shí),本文還論證了無人機(jī)對(duì)最優(yōu)路徑的跟蹤問題,最大程度地降低飛行過程中由于突發(fā)情況產(chǎn)生的對(duì)于最優(yōu)路徑的重新計(jì)算,降低飛控計(jì)算機(jī)的計(jì)算量,提高實(shí)際飛行路徑與最優(yōu)路徑的契合度。文中沒有考慮到由于不可抗力導(dǎo)致無人機(jī)偏離最優(yōu)路徑時(shí),飛控對(duì)路徑進(jìn)行重新繪制的問題,這也是下一步需要研究的方向。
參考文獻(xiàn)
[1] 張建中,陳世軍,余大祥.最短路徑射線追蹤方法及其改進(jìn)[J].地球物理學(xué)進(jìn)展,2003(18):146-150.
[2] 廖慧芬,邵小兵.動(dòng)態(tài)規(guī)劃算法的原理及應(yīng)用[J].中國(guó)科技信息,2005(21):42-42.
[3] 榮輝,李冬,殷堂春.基于Matlab無人機(jī)數(shù)學(xué)模型仿真分析與研究[J].科學(xué)技術(shù)與工程,2008(8):1510-1512.
[4] Martins W S,Del Cuvillo J B,Useche F J,et al.A Multithreaded Parallel Implementation Of A Dynamic Programming Algorithm For Sequence Comparison[C]// In Pacific Symposium on Biocomputing,2001:311-322.
[5] Nordbruch S,Galbas R,Ruehle A.Method and control device for highlighting an expected movement path of a vehicle: US,US20130054089 A1[P].2013.
[6] 張燕,徐德民.移動(dòng)機(jī)器人路徑跟蹤控制方法研究[J].機(jī)電一體化,2008(6):48-51.
[7] 譚和林,夏道軍,趙婉.小無人機(jī)系統(tǒng)總體技術(shù)探析[J].科技風(fēng),2013(16):12-12.
[8] Wang Sheng,Li Lemin.An enhanced algorithm for multiple constraints optimal path calculation[C]// Communications,Circuits and Systems,2004.
Selection of the Optimal Path for Established Flight Mission of Fixed-wing UAV
Abstract:For the features of fixed-wing UAV,e.g.,complex path planning,redundant flight track,and high degree of deviation,through setting up the aerodynamics model of three-dimensional space,calibrating the preset coordinates,and according to the factors of aerodynamic principle,PID algorithm,and environment under conventional aerodynamic layout,the flight track grid points are managed.With the improved dynamic planning algorithm,the method for accurately and quickly calculating the optimal path of coherence predetermined coordinates is researched.The paths are compared,corrected and re-planned in real time by flight control computer through dynamic contrast and state prediction algorithms,thus the UAV can accomplish the established flight mission along the optimal path with predetermined coordinates.
Keywords:Unmanned-aerial-vehicle(UAV)Fixed-wingFlight track optimizationOptimal pathPredetermined coordinateAerodynamic modelsPIDState predictionDynamic contrast
中圖分類號(hào):TH86;TP27
文獻(xiàn)標(biāo)志碼:A
DOI:10.16086/j.cnki.issn1000-0380.201605004
修改稿收到日期:2016-02-18。
作者梁爽(1992-),女,現(xiàn)為大連大學(xué)電子信息工程專業(yè)在讀本科生;主要從事自動(dòng)控制、通信技術(shù)方向的研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19