一種GPS單歷元整周模糊度固定方法
2016-06-27 01:24:43鄭衍寧徐琪堯王勝利
導航定位學報 2016年2期
劉 會,鄭衍寧,徐琪堯,王勝利
(1.山東科技大學 測繪科學與工程學院,山東 青島 266590;2.山東科技大學 海洋工程研究院,山東 青島 266000)
一種GPS單歷元整周模糊度固定方法
劉會1,鄭衍寧1,徐琪堯1,王勝利2
(1.山東科技大學 測繪科學與工程學院,山東青島266590;2.山東科技大學 海洋工程研究院,山東青島266000)
摘要:傳統的LAMBDA算法一般需要利用多個歷元的觀測數據,所需觀測時間相對較長;同時確定模糊度的過程中需要對周跳進行探測和修復,以決定是否繼續搜索確定模糊度,或是開始下一輪搜索。提出一種標準相位-偽碼組合(MW組合)解算單歷元模糊度的方法:在寬巷模糊度搜索的基礎上,通過確定寬巷模糊度候選集合,直接取整求解L1載波模糊度;并將L1固定解代入雙差觀測方程中進行最小二乘解算,依據單位權中誤差確定最優的寬巷模糊度組合,實現單歷元整周模糊度快速固定。結果表明,采用MW組合的單歷元模糊度固定法的模糊度固定成功率可達到94.77%。該方法避免了模糊度解算中的秩虧問題,無需進行周跳探測,可用于動態實時定位。
關鍵詞:模糊度固定;MW組合;單歷元解算;整周模糊度搜索
0引言
在高精度全球定位系統(global positioning system,GPS)載波相位精確定位中,利用載波相位觀測值的實時動態差分法(real-time kinematic,RTK)定位技術能夠達到cm級的定位精度,快速固定模糊度對提高衛星定位作業的效率尤為重要[1]。目前,國內外對模糊度求解的研究中應用最廣泛的是最小二乘相關平差(least squares ambiguity decorrelation adjustment,LAMBDA)方法[2],準確解算整周模糊度時一般需要利用多個歷元的觀測數據,并且需要對周跳進行探測和修復。傳統的多歷元方式理論已非常成熟,近年來國內外許多學者對單歷元整周模糊度解算進行了研究,并取得了一定成果。比如:針對單頻單歷元組成的法方程嚴重病態性,應用Tikhonov正則化方法獲取可信的浮點解法[3];根據雙頻相位數據的內在關系和統計特性,以L2整周模糊度為橫軸、以L1整周模糊度為縱軸,構建雙頻相位雙差整周模糊度誤差帶的DUFCOM法[4];先確定寬巷模糊度再確定L1/L2模糊度法[5];對雙差觀測方程系數矩陣進行奇異值分解,選取正則化矩陣并利用均方誤差矩陣替代協方差陣進行LAMBDA求解法[6];以及其他的一些基于LAMBDA的算法[7-13]。
本文將采用MW組合(Melbourne-Wubbena)的單歷元模糊度固定方法,通過搜索寬巷模糊度實現單歷元載波雙差定位。此方法不必考慮周跳,減少了確定模糊度的時間;無需初始化且對周跳和衛星失鎖不敏感。
1單歷元模糊度固定方法
首先將單歷元中2臺接收機觀測多顆衛星所得到的P1碼偽距、P2碼偽距、L1載波相位、L1載波相位4個觀測值以及L1、L2載波的波長、頻率分別進行線性MW組合,求出寬巷模糊度的浮點解;根據寬巷模糊度浮點解的中誤差,確定每個寬巷模糊度的整數解取值范圍;將每個寬巷模糊度的可能取值進行排列組合;對于每1種可能正確的寬巷模糊度整數解組合求雙差后,計算其對應的L1模糊度浮點解,并對其進行上下取整,固定L1模糊度;將L1模糊度代入載波雙差觀測方程,利用間接平差方法進行單歷元最小二乘求解;最終在所有寬巷模糊度組合所求出的若干組解中找到單位權中誤差最小的一組解及其對應的寬巷模糊度組合。至此,單歷元模糊度固定完成。圖1為實現基于MW組合的單歷元模糊度固定流程圖。
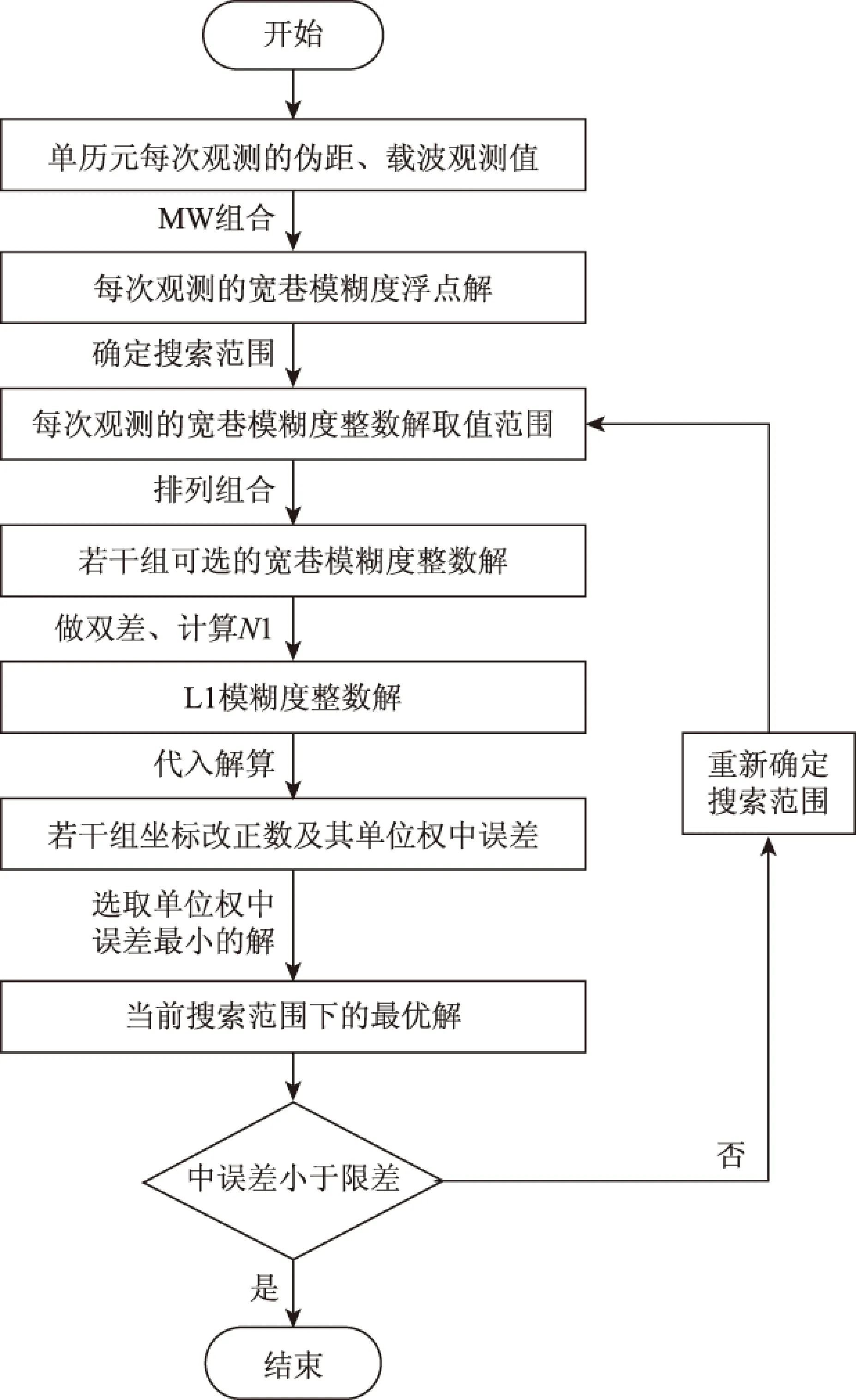
圖1 單歷元模糊度固定運算流程示意圖
1.1雙差定位原理
整周模糊度的求解通常和雙差組合相結合。雙差組合的優點是接收機間和衛星間依次求差可以消除衛星鐘差、接收機鐘差及星歷誤差的影響,并且減少對流層和電離層折射等的影響,尤其當基線較短時效果更加明顯。線性化的偽距雙差觀測方程可表達為[14]
(1)
線性化的載波雙差觀測方程可概括為

(2)
1.2MW組合
將線性化的偽距雙差觀測方程式(1)與載波雙差觀測方程式(2)相減可得[15]

(3)
式(3)除以λj,并對j=1和j=2進行差分處理,得到

(4)
其中:ΦW=Φ1-Φ2、 NW=N1-N2分別稱為寬巷觀測量和模糊度;c為光速;A1為電離層參數;λ1和λ2分別為L1和L2載波波長;f1和f2分別為L1和L2載波頻率。這里省略了誤差項,進而推理可得

(5)
1.3寬巷模糊度搜索
假設有m臺接收機、n顆共視衛星,則每個歷元發生了m·n次觀測,每次觀測均能求出一個寬巷模糊度浮點解和它對應的搜索范圍為

(6)
式中Pi代指第i臺接收機。然后將這m·n個搜索范圍中的模糊度取值排列組合,獲得tm×n組可能的寬巷模糊度整數解,其中t表示每一個寬巷模糊度有t種可能的整數取值。將不同衛星的模糊度進行組合為

(7)式中:i=1,2,3,…,m;j=1,2,3,…,t。實驗中利用MW組合所得的浮點解進行上下取整,令t=2,即可包含絕大多數寬巷模糊度的真值解。則會產生2m×n種組合:對于其中任一組合,按照雙差觀測方程對寬巷模糊度求雙差,會產生n-1個雙差的寬巷模糊度。
1.4基頻模糊度固定與坐標計算
寬巷模糊度的計算方法為[15]
NW=N1-N2。
(8)
式中:NW為寬巷模糊度;N1和N2分別為L1和L2載波觀測值的模糊度。然后通過式(9)求

(9)
其中Φ1為L1載波觀測值。
(10)
將雙差所得的N1代入載波雙差觀測方程構成ν=Bx-l的形式組建B陣和L陣,運用間接平差原理進行最小二乘求解,將各組合所計算出的單位權中誤差進行比較,找到單位權中誤差中最小的解。如果經過計算篩選所得的觀測值單位權中誤差滿足限差要求,則模糊度固定基本成功。
2實驗與結果分析
每個寬巷模糊度的搜索范圍越大,其所有可能的組合就越多,整體呈指數增長。由于偽距P1和P2的觀測噪聲是0.3 m,載波L1、L2的觀測噪聲是0.003 m,結合MW組合公式和誤差傳播定律公式,可知MW組合計算出的寬巷模糊度的中誤差約為0.248 m。由于在概率統計中,偶然誤差絕對值小于3倍中誤差的概率為99.7%,而對于MW組合計算的寬巷模糊度,3倍中誤差約為0.744 m,略小于寬巷組合的波長。加之寬巷模糊度的真值為整數,故寬巷模糊度的真值有很大概率存在于寬巷模糊度浮點解的前后2個整數中。因而將利用MW組合所得的浮點解進行上下取整,即可包含絕大多數寬巷模糊度的真值解。
以2011-03-27 8—9時安徽淮南安徽理工大學master站和rover站的2臺NovAtel型接收機對G25、G22、G31、G14、G09、G18、G12等7顆衛星的觀測數據來為例,采樣間隔為1 s,2臺接收機之間的距離是31.68 m。表1是基站和移動站對7顆衛星的觀測記錄中1個歷元的雙差寬巷模糊度浮點解,上下取整所得的整數解以及由此所得的雙差寬巷模糊度、雙差L1載波模糊度。
表2為觀測數據中模糊度固定成功的例子,表3為觀測數據中模糊度未固定成功的例子,可看出未成功固定模糊度時其中誤差會明顯大于成功固定時,可利用這一特點判斷某一歷元是否成功固定。
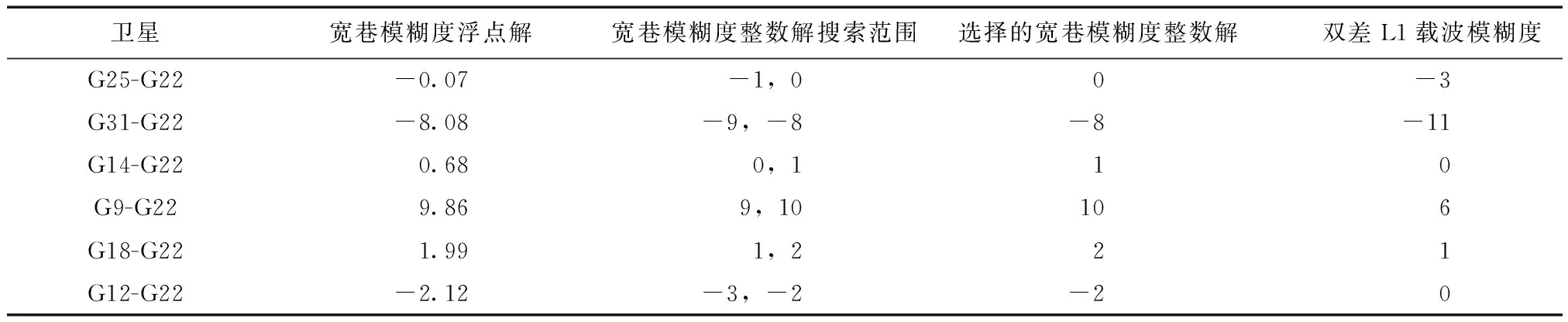
表1 模糊度搜索舉例
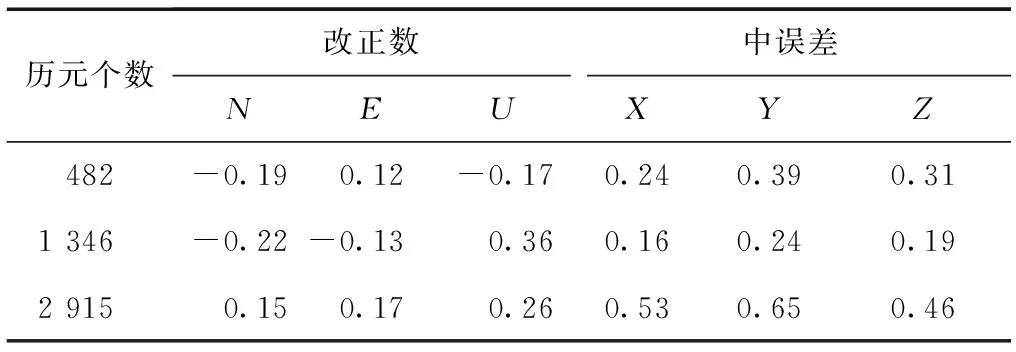
表2 模糊度固定成功的歷元的坐標改正數和中誤差 cm
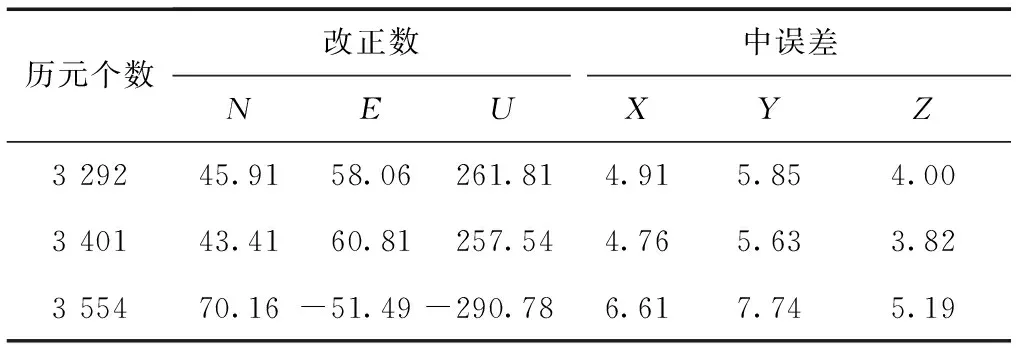
表3 模糊度固定不成功的歷元的坐標改正數和中誤差 cm
圖2、3為剔除了模糊度未成功固定的歷元之后,所得的X、Y、Z方向的改正數的中誤差以及點位中誤差的解算效果圖。
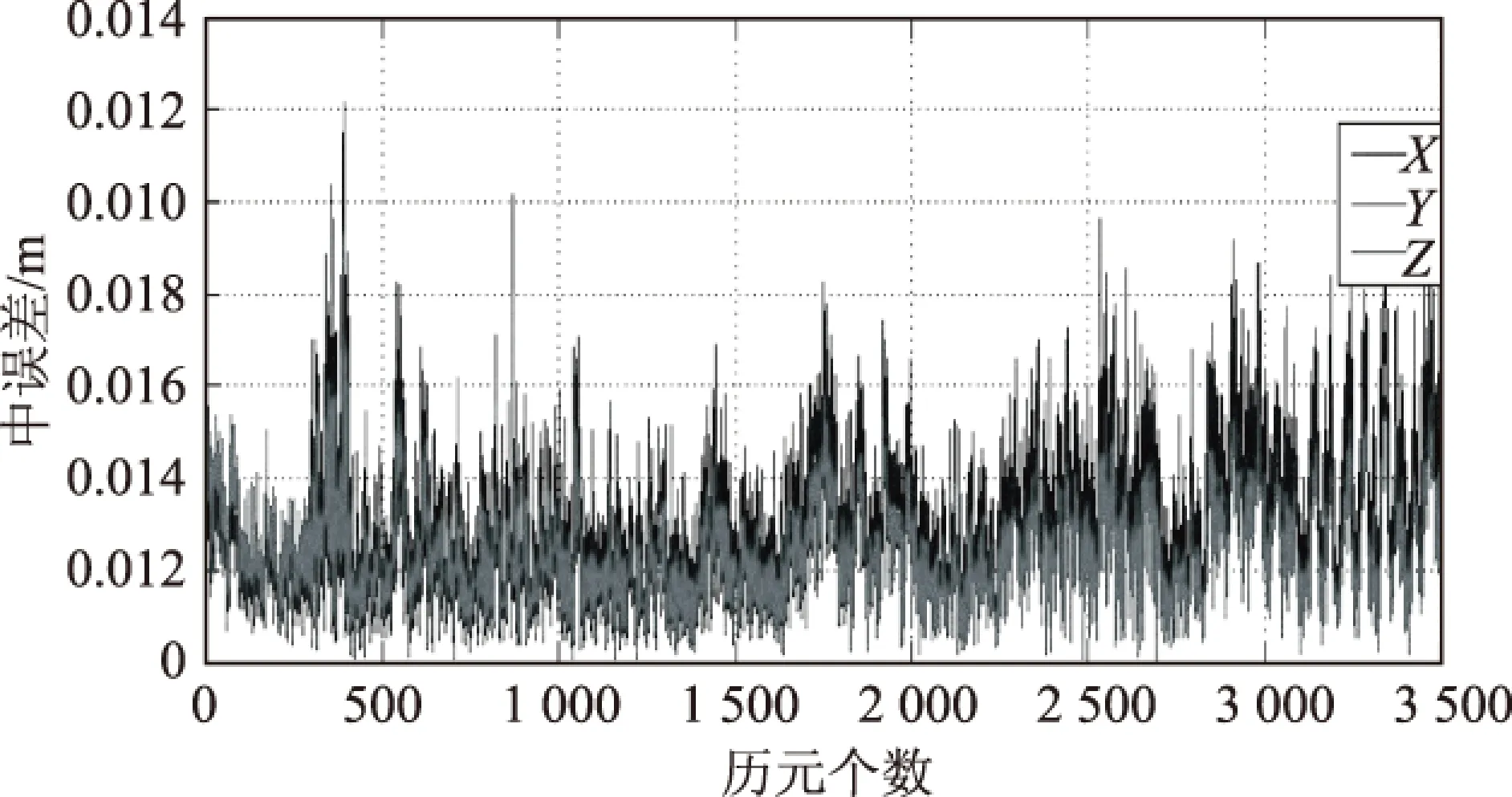
圖2 X、Y、Z方向的改正數中誤差
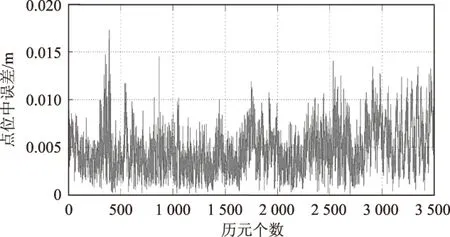
圖3 改正數點位中誤差
圖4為剔除了模糊度未成功固定的歷元之后,所得的N、E、U方向的改正數的解算效果圖。
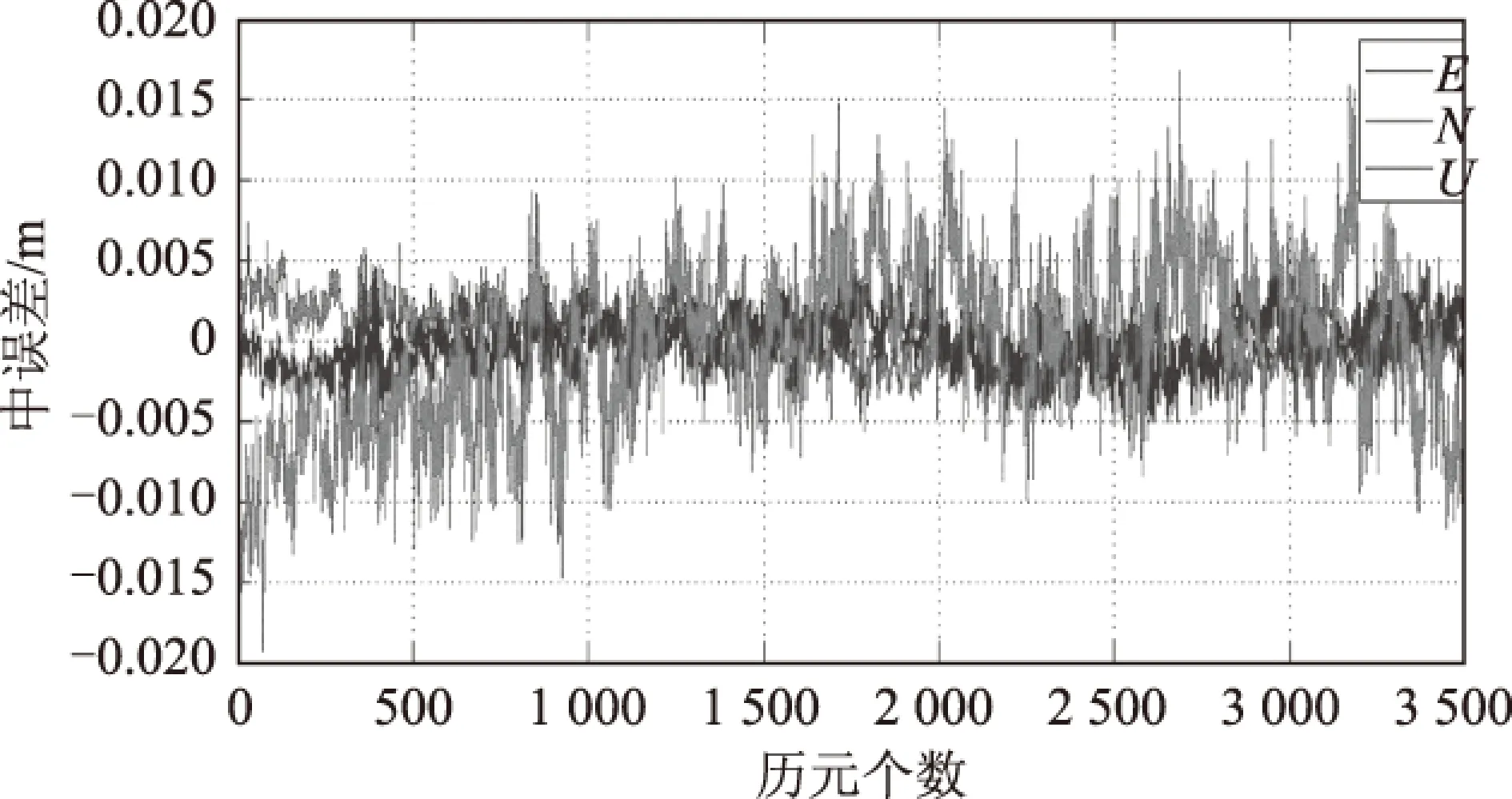
圖4 N、E、U方向坐標改正數
經實驗檢驗可得:3 599個歷元中只有20個歷元由于搜索范圍沒有包含正確的模糊度組合而未能固定成功;其余歷元全部搜索到了正確的模糊度組合,固定成功率約為99.44%。由表2和圖2中模糊度固定成功的3個方向的改正數中誤差結果可知運用MW組合解算的X、Y、Z3方向改正數中誤差均小于0.015 m。圖3所示點位中誤差集中在8 mm以內;而表3表明在模糊度固定失敗的情況下,3方向中誤差一般均超過0.03 m;圖4表明,水平方向坐標改正數偏差均小于0.01 m,豎直方向坐標改正數偏差均小于0.02 m,豎直方向定位精度略遜于水平方向;另外可以看出豎直方向改正數整體呈現一種系統性的波動,是由多路徑效應、天線相位中心變化引入的系統誤差。
為驗證MW組合及N1單歷元的模糊度解算方法對模糊度固定效率和成功率的影響,我們對表4所示的幾個短基線觀測站2013-07-13的觀測數據進行了測試。
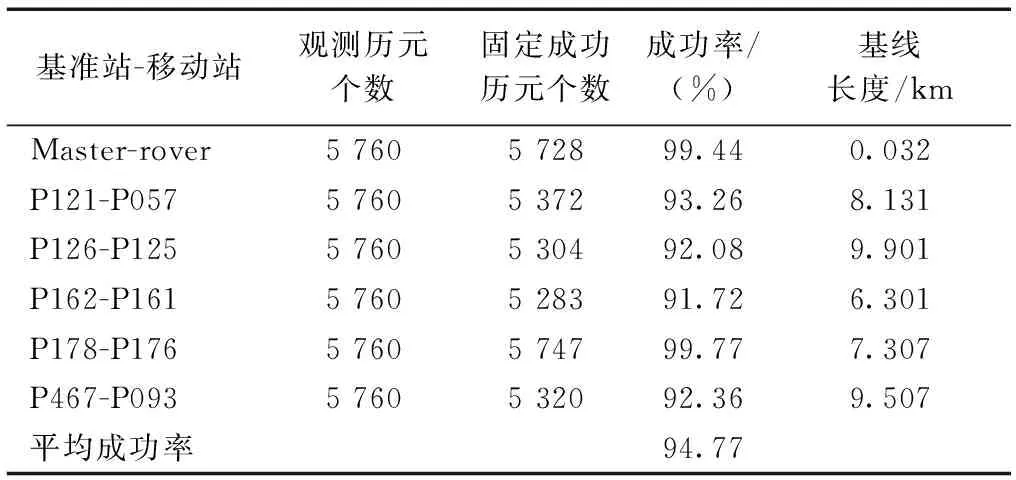
表4 測站成功率統計
3結束語
模糊度解的可靠性對GPS精密定位是至關重要的。本文在基于載波相位觀測值的RTK定位技術的基礎上,使用MW組合計算寬巷模糊度;且由于只采用了單個歷元的觀測信息,故無需進行周跳探測,其定位精度亦能達到cm級。仿真結果表明:進行單歷元載波雙差定位的模糊度固定成功率較高,固定成功率可達99.44%;運用MW組合及L1模糊度固定成功的X、Y、Z3方向改正數中誤差均小于0.015 m,點位中誤差集中在8 mm以內,水平方向坐標改正數偏差均小于0.01 m,豎直方向坐標改正數偏差均小于0.02 m,豎直方向定位精度略遜于水平方向。它能夠在比較短的時間內確定觀測值的模糊度,從而達到較好的定位精度,在實時動態相對定位等領域有很大用途。
參考文獻
[1]楊永平,蘭孝奇,夏開旺.GPS相位平滑偽距差分定位技術的試驗研究[J].工程勘察,2006(2:) 52-56.
[2]祝會忠,高星偉,徐愛功,等.網絡RTK流動站整周模糊度的單歷元解算[J].測繪學報,2010,35(2):78-79.
[3]李慕清,劉正華,夏傳甲,等.GPS單歷元模型病態方程解算方法研究[J].大地測量與地球動力學,2013,33(增刊1):160-162.
[4]郭際明,周命端,黃長軍,等.GPS整周模糊度單歷元DUFCOM方法擴展及定位解精度研究[J].武漢大學學報·信息科學版,2013,36(10):1221-1224.
[5]祝會忠,高星偉,秘金鐘.一種GPS整周模糊度單歷元解算方法[J].測繪科學,2011,36(4):9-11.
[6]李豹,許江寧,曹可勁,等.改進LAMBDA算法實現單頻GPS整周模糊度快速解算[J].中國慣性技術學報,2013,21(3):365-368.
[7]唐衛明,孫紅星,劉經南.附有基線長約束的單頻數據單歷元LAMBDA方法整周模糊度確定[J].武漢大學學報·信息科學版,2005,30(5):444-446.
[8]TANG Weiming,SUN Hongxing,LIU Jingnan.Ambiguity resolution of single epoch single frequency data with baseline length constraint using LAMBDA algorithm[J].Geomatics and Information Science of Wuhan University,2005,30(5):444-446.
[9]高星偉,劉經南,葛茂榮.網絡RTK基準站間基線單歷元模糊度搜索方法[J].測繪學報,2002,31(4):305-309.
[10]李征航,劉萬科,樓益棟,等.基于雙頻GPS數據的單歷元定向算法研究[J].武漢大學學報·信息科學版,2007,32(9):753-756.
[11]張偉,高珊.一種固定基線單頻整周模糊度求解方法[J].導航定位學報,2016,4(1):88-93.
[12]徐彥田,程鵬飛,蔡艷輝,等.中長基線連續運行參考站間模糊度快速解算[J].導航定位學報2013,1(2):15-19.
[13]任小偉.載波相位差分相對定位的模糊度求解[J].導航定位學報,2014,2(1):20-22.
[14]李征航,黃勁松.GPS測量與數據處理[M].2版.武漢:武漢大學出版社,2010:163-165.
[15]XU Guochang.GPS theory,algorithms and applications[M].2nd ed.Potsdam:Springer,2007:98-101.
An algorithm for GPS integer ambiguity resolution on single-epoch
LIU Hui1,ZHENG Yanning1,XU Qiyao1,WANG Shengli2
(1.Shandong University of Science and Technology,Shanghai Qingdao 266000,China;2.Institute of Ocean Engineering,Shandong University of Science and Technology,Shanghai Qingdao,China)
Abstract:Aiming at LAMBDA algorithom that needs a long observation time in multi-epoch ambiguity fixing,an algorithm using standard phase-code combination (MW-combination) was proposed.The solving efficiency of integer ambiguity resolution about LAMBDA algorithom was significantly affected by the demand of cycle-slip detection and repair which decided whether to continue fixing ambiguity.The algorithm which based on the wide-lane ambiguity resolution,permutated and combined the wide-lane ambiguity and fixed the L1 ambiguity by direct integral method.The algorithm substituted L1 ambiguity into observation equation to realize the rapid integer ambiguity fixing on single-epoch by using the least-squares method,and the combinations with the smallest unit weight mean square error was optimal.The results illuminated that the method of ambiguity resolution on single-epoch with the MW-combination could reach the success rate of ambiguity fixing of 94.77%.The algorithm avoided rank defect problem in integer ambiguity resolution and dispensed with cycle-slip detection,which could be applied in RTK (real time kinematic).
Keywords:ambiguity fixing;MW combination;resolution on single-epoch;integer ambiguity resolution
收稿日期:2016-01-08
基金項目:大地測量與地球動力學國家重點實驗室開放基金項目(SKLGED2015-3-1-E)。
第一作者簡介:劉會(1994—),女,山東濟寧人,本科學歷,研究方向為GNSS定位數據處理。
中圖分類號:P228
文獻標志碼:A
文章編號:2095-4999(2016)02-0057-05
引文格式:劉會,鄭衍寧,徐琪堯,等.一種GPS單歷元整周模糊度固定方法[J].導航定位學報,2016,4(2):57-61.(LIU Hui,ZHENG Yanning,XU Qiyao,et al.An algorithm for GPS integer ambiguity resolution on single-epoch[J].Journal of Navigation and Positioning,2016,4(2):57-61.)DOI:10.16547/j.cnki.10-1096.20160212.