基于自適應神經網絡的風力擺設計實現
2016-06-25 03:07:11許可行劉延飛羊帆
科技與創新 2016年12期
許可行 劉延飛 羊帆


摘 要:隨著神經網絡的不斷發展,控制系統的設計出現了新的方法。提出了一種自上而下的設計方法,并詳細地闡述了其工作原理和軟、硬結合的設計理念。通過卡爾曼濾波融合陀螺儀和加速度計測量反饋的數據,并基于自適應神經網絡PID算法的調節,實現對風機驅動模塊輸入電壓的PWM控制,以達到對風力擺運動軌跡的預定控制。設計方案以XS128單片機為核心,配合以風機驅動模塊、陀螺儀測量模塊、串口數據接收模塊和電源模塊。測試結果表明,該方案所設計的風力控制系統響應快、偏差小、程序過程清晰、電路結構簡單、系統可靠性高、易于維護和更新。
關鍵詞:自適應神經網絡;風力擺設計;XS128單片機;數字陀螺儀
中圖分類號:TP273+.2 文獻標識碼:A DOI:10.15913/j.cnki.kjycx.2016.12.006
隨著世界各國對水下航行器的不斷研究,人們對水下航行器的需求已經不再僅局限于在水中低速或高速地運動,而是要求其具有懸浮、爬潛以及按照預定軌跡運動等更出色的機動性能。但是,由于水下航行器在運動時受到的環境干擾復雜,需要設計更優的控制算法,使水下航行器具有較強的魯棒性和抗干擾能力。因此,本文以風力擺為研究對象,模擬水下航行器的運動環境,提出了一種基于自適應神經網絡的控制方法。該方法是將幾組軸流風機搭配成風力擺,依靠其內部風機轉動形成軸向風力,并以流體力學和牛頓第三定律等相關理論為指導,實現其在復雜環境下的特定運動。這一方案既保證了系統的穩定性,又使產生的控制誤差最小。
1 理論分析和計算
1.1 機構的運動學分析
為了方便分析,在分析運動學之前,我們作了以下幾種假設:①假設系統X軸與Y軸相互獨立且不存在耦合;②假設系統均為勻質剛體,不存在彈性形變;③假設運動過程中系統的慣性參數、結構參數不發生改變;④假設風機及底座質量遠遠大于擺桿質量,忽略擺桿質量對系統質心的影響。
1.3.3 目標三:圓錐擺控制
在目標二的基礎上設定α=λt,即可實現期望運動的圓周運動。其中,參數λ用于控制圓錐擺的角速度。相關計算公式為:
1.3.4 目標四:有界干擾情況下的控制
由于神經網絡PID控制本身是一種自適應控制,具有較好的魯棒性,通過實驗不斷測試參數可以實現有界干擾情況下的控制。
2 總體設計
2.1 控制系統設計
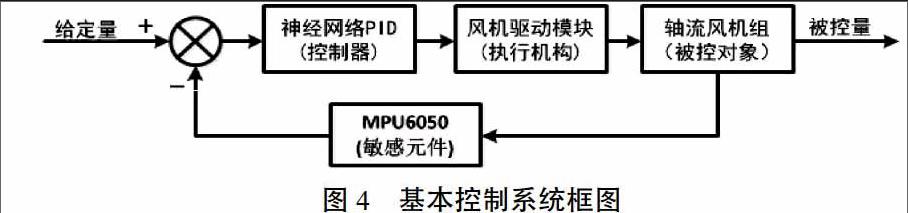
根據理論計算的結果得出系統的性能描述,再對系統進行分解,將其核心控制部分劃分為6個子模塊,分別是給定量輸入、神經網絡PID、風機驅動模塊、軸流風機組、MPU6050、被控量輸出。其基本控制系統如圖4所示。
2.2 機械結構設計
風力擺結構如圖5所示,通過萬向節連接硬質連桿,連桿另一端連接“十”字形硬質底座;“十”字形底座每一端各安裝一個軸流風機,在硬質連桿中部安裝數字陀螺儀和加速度計。通過“十”字形安裝軸流風機,實現了風擺在擺動投影面內的四象限可達。采用硬質桿連接可有效避免連接彈性形變所帶來的非線性控制問題。
2.3 測量模塊設計
本文的設計方案所采用的慣性測量元件為高精度的陀螺加速器MPU6050,通過處理器所帶的串口讀取MPU6050測量的數據。該模塊集成了卡爾曼濾波算法,可有效降低干擾,提高測量精度,并且整合了三軸陀螺儀、三軸加速器和六軸運動處理組件。MPU6050的角速度全格感測范圍為±250°/s(dps)、±500°/s(dps)、±1 000°/s(dps)和±2 000°/s(dps),可準確追蹤物體的運動,模塊采集到的數據可通過I2C或SPI接口傳輸。
陀螺儀角度計算公式為:
θn=θn-1+(gyro-gyroc)×gyror. (8)
公式(8)中:θn為當前的角度值,°;gyro為陀螺儀的敏感軸偏轉值;gyroc為陀螺儀的零點偏移值;gyror為陀螺儀的比例。
加速度計角度計算公式為:
θz=(Az-Cz)×Rz. (9)
公式(9)中:θz為加速度計敏感軸Z軸產生的傾角,°;Az是加速儀Z軸的讀數;Cz為Z軸零點的偏移量,測量方法與陀螺儀一致;Rz為Z軸的比例。
3 測試方案和測試結果
3.1 測試條件及方案
測試環境:溫度28 ℃,濕度60%.
測試儀器:60 W電風扇、TDS210示波器、VICTOR VC09805萬用表、PS-528金屬秒表、量角器、直尺、基準測量板。
系統參數:質量350 g,擺長(靜止時頂端到測量基準面的垂線距離)110 cm。
測試步驟:①對各個硬件電路進行單模塊測試,保證各模塊功能正常后進行系統聯調;②將程序下載到單片機中,觀察不同模式下擺桿的擺動狀況,并實時記錄數據,分析判斷。
3.2 測試結果與分析
測試結果有以下幾種:①測試陀螺儀角度、角速度的精度。角度測量偏差為0.1°,角速度測量精度為0.05°/s。該精度滿足使用要求。②測試類似自由擺動,相關測試結果見表1.③測試30~60 cm可控直線擺動實驗,相關測試結果見表2.④測試設定擺向擺動,相關測試結果見表3.⑤測試圓錐擺,相關測試結果見表4.⑥測試有外部干擾(靜止時水平距離風力擺為50 cm處,對準風力擺中心用60 W電風扇直吹)的圓錐擺,相關測試結果見表5.
4 結束語
本設計采用數字陀螺儀作為測量裝置,由于系統存在非線性關系且要求有一定的魯棒性,因此采用神經網絡PID控制算法獲得系統輸入控制率。測試結果表明,該系統設計性能良好,基本達到設計要求。可見,運用基于自適應神經網絡的控制算法,不僅能夠保證水下航行器軌跡跟蹤的穩定性,還能夠保證軌跡跟蹤的精度。這對其執行循跡探測任務具有重大意義。
參考文獻
[1]王婷,宋保維.水下航行器多推進器動力定位控制[J].兵工學報,2006,27(5).
[2]王其,徐曉蘇,張濤,等.模糊自適應濾波在水下航行器組合導航系統中的應用[J].中國慣性技術學報,2008,16(3).
[3]陳向堅,李迪,白越,等.模糊神經網絡在自適應雙軸運動控制系統中的應用[J].光學 精密工程,2011,19(7).
[4]李廣軍.基于RBF神經網絡的PID整定[D].成都:西南交通大學,2005.
[5]Liu T F,Wang C,Hill D J.Learning from neural control of nonlinear systems in normal form.Systems & Control Letters,2009,58(9).
[6]劉迪.基于神經網絡的PID控制算法[D].哈爾濱:黑龍江大學,2008.
[7]Bruno Sinopoli,Luca Schenato,Massimo Franceschetti.Kalman filtering with intermittent observations.IEEE Transactions on Automatic Control,2004,49(9).
[8]江帆,張振山,鄧小濤,等.慣性導航系統陀螺漂移補償算法研究[J].微計算機信息,2007,23(11).
〔編輯:劉曉芳〕
