一種基于EKF的GPS/SM組合定位算法
2016-06-22 10:15:56胡輝顏瑜軍歐敏輝
全球定位系統 2016年2期
胡輝,顏瑜軍,歐敏輝
(華東交通大學信息工程學院,南昌 330013)
一種基于EKF的GPS/SM組合定位算法
胡輝,顏瑜軍,歐敏輝
(華東交通大學信息工程學院,南昌 330013)
摘要:在城市峽谷中兩側建筑物幾何結構相近的情況下,陰影匹配算法難以保證沿街方向的定位精度。針對此問題,本文通過在陰影匹配算法的基礎上,引入GPS速度信息,提出一種基于EKF的GPS/SM組合定位算法。實測結果表明,本文提出的算法在沿街方向的平均絕對偏差是1.18 m,比傳統GPS的3.58 m和陰影匹配算法的4.34 m,分別降低了67.0%和72.8%。
關鍵詞:GPS;城市峽谷;陰影匹配;擴展卡爾曼濾波
0引言
近年來,隨著GPS等全球衛星導航系統高度民用化,其應用領域在不斷地深化和擴大,衛星定位已成為人們日常生活中一項不可或缺的技術[1]。在城市峽谷地區,密集的高大建筑物或狹窄街道,使得衛星集中分布在道路上方的“條狀”高空,造成幾何精度因子(GDOP)過大,定位精度往往不足,且衛星信號在過街(cross-street)方向被高樓遮擋程度要比沿街(along-street)方向嚴重得多,因此過街方向的定位精度遠不如沿街方向[2]。
針對城市峽谷下定位精度低的問題,Groves提出陰影匹配(SM)算法[3-4],借助用戶附近的三維(3D)建筑模型,從不同的位置預測衛星的可見性結果,與用戶實際觀測衛星可見性結果進行對比,對預測和觀測結果進行模板匹配來判斷用戶的位置,靜態實測結果表明,使用該算法的GNSS接收機能夠正確地識別街道和人行道。Groves等人在后續研究中通過增加衍射模型和信噪比值改善陰影匹配模板提高定位精度[5-6],徠卡Viva GNSS接收機上靜態實測結果表明,使用改善的模板使過街方向定位平均誤差減少了9.4%,并適于在Galaxy S3主流手機上使用。文獻[7]和[8]在陰影匹配的基礎上通過非線性濾波估計方法用于優化定位結果,在Galaxy S3手機上動態實測結果表明,使用該算法在過街方向平均誤差為2.41 m,相比傳統GNSS定位減少了78%.以上此類基于陰影匹配算法的研究,使得過街方向精度不斷改善,但是沿街方向的精度依然存在不足,這是因為在城市峽谷中兩側建筑物幾何結構相近的情況下,陰影匹配算法難以保證沿街方向的定位精度。
針對此問題,本文通過在陰影匹配算法的基礎上,引入GPS速度信息,提出一種基于擴展卡爾曼濾波(EKF)的GPS/SM組合定位算法(簡稱EKF-SM算法),通過EKF設計[9],建立系統的狀態方程和觀測方程,將位置和速度信息融合,獲取最優位置估計。實測結果表明該算法有效地提高了沿街方向的定位精度。
1陰影匹配算法
在城市峽谷中,由于建筑物高度不同,造成衛星信號遮擋陰影區域不同,從而街道上不同位置對衛星信號的接收情況也將不同,而對于街道上任一位置,用戶都可以事先通過儲存其附近的3D建筑模型和星歷來預測某衛星直達信號的接收情況,這樣將某一位置上接收衛星信號的預測情況與用戶實際接收情況進行對比,就可以判斷該位置是否可能是用戶的實際位置。如圖1所示,簡單地說明了SM的原理,圖中只需判斷某顆衛星是否被建筑物遮擋即未接收直達信號,就可以知道用戶具體在街道兩邊的哪一邊,同理,當增加衛星數目時,可以用該方法進一步提高定位精度。那么,一個單歷元時刻的SM算法可以分為六個步驟,基本實現過程,如圖2所示。
1) 初始化過程:通過GPS偽距測量得到標準單點定位結果,作為用戶的初始位置P0.
2) 搜索過程。以初始化位置P0為中心,以固定半徑為圓或者矩形確定搜索區域,該區域內的所
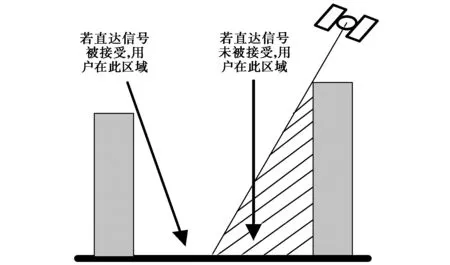
圖1 利用直達信號接收情況來判斷用戶位置
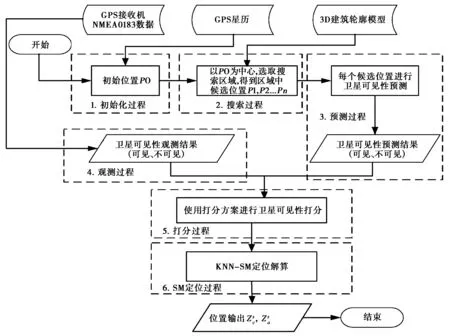
圖2 陰影匹配算法系統框圖
有候選位置(P0,P1,…,Pn)可以為1 m2或更大面積的網格。本文設置的搜索區域為40×15 m2的矩形,其中網格面積為1 m2.
3) 預測過程:在步驟2的基礎上,對于每一個候選位置,通過GPS星歷計算此歷元下衛星方位角和仰角,同時利用3D建筑模型計算同一方位角下建筑的邊界仰角,如果該方位角下的衛星仰角大于建筑邊界仰角,那么就預測該衛星是可見的;否則,預測該衛星是不可見的。
4) 觀測過程:從GPS接收機NMEA0183輸出結果中獲取衛星可見性結果及可見衛星信號信噪比(SNR),其中低SNR值的衛星信號被接收,可能是因為接收到了該衛星的反射或衍射信號,因此該衛星信號應該被判為不可見,此情況下可以統計一個SNR經驗值來判別,本文取40 dB-Hz.
5) 打分過程:對預測和觀測過程衛星可見性進行模板匹配,匹配性最好的候選位置在SM定位解算中擁有更高權值。計算一個候選位置的分數分為兩個階段,首先,根據大于截止仰角(本文取10°)的每顆衛星,通過預測和觀測之間衛星可見性的得分方案,如圖3所示,匹配出一個分值;其次,對于搜索區域內每個候選位置,通過得分函數得到總分數:
(1)
式中: fpos(j) 為候選位置j的位置分值; fsat(i,j)為候選位置j處衛星i的分值; n為大于截止仰角的衛星顆數。
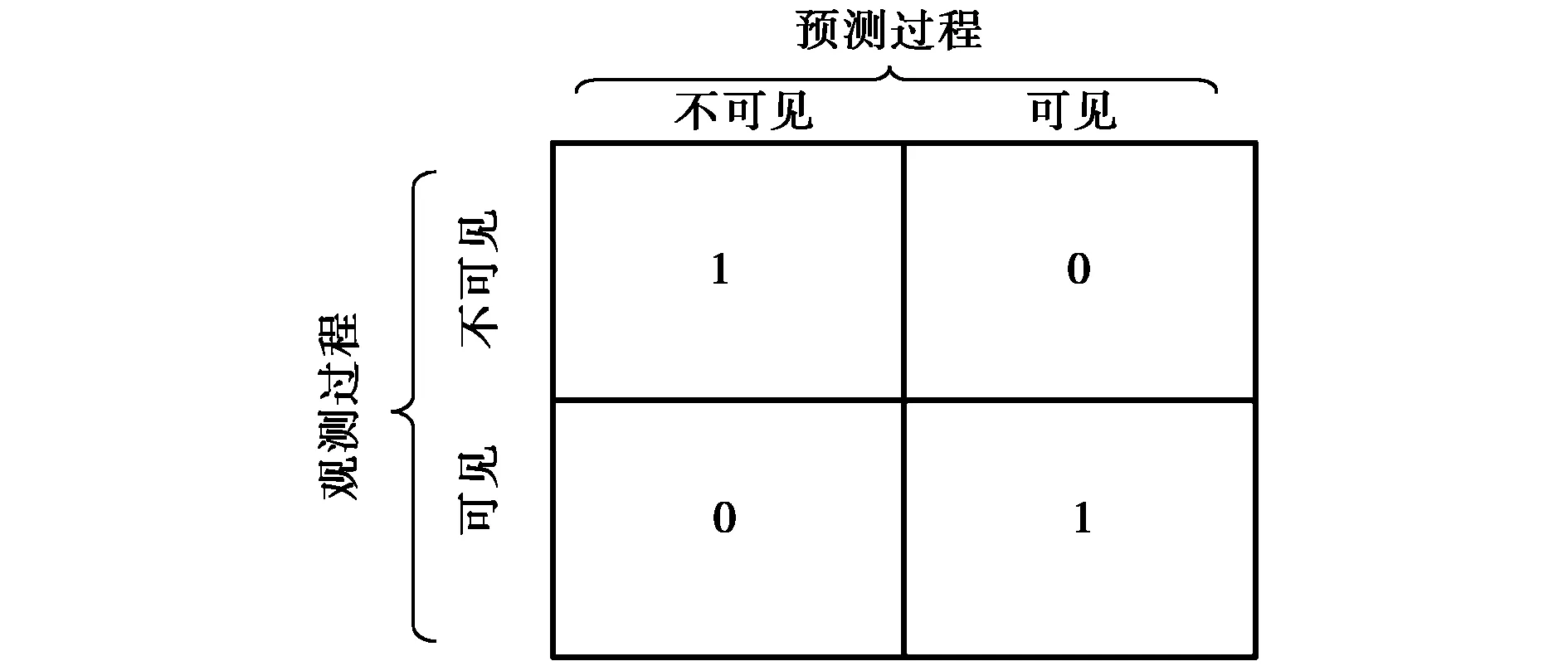
圖3 衛星可見性得分方案
6)定位解算過程:當前打分方案系統下的分數為整數,因此一些網格點通常具有有一樣的最高分值,而擁有得分最高的這些候選位置被認為是接近真實的最鄰近值,對于K個最鄰近點,位置估計是使用過街和沿街坐標分量表示:
(2)
(3)
式中ci和ai為第i個得分最高的候選位置的過街和沿街坐標分量值,值得注意的是對于不同歷元下的K值是不同的,它是依據有多少候選位置擁有最高分值。此類定位方法采用類似于K最鄰近點算法(KNN)來估計位置,簡稱為KNN-SM算法。
2擴展卡爾曼濾波設計
隨機線性離散系統的運動可用帶有隨機初始狀態、系統過程噪聲及觀測噪聲的差分方程和離散型觀測方程來描述,這些方程可通過對連續隨機線性系統的狀態方程和觀測方程離散化得到[10]。本文通過擴展卡爾曼濾波設計,將位置和速度信息融合,建立系統的狀態方程和觀測方程。
2.1狀態方程建立
考慮戶處于一種低動態運動的環境下,采用PV模型。選取狀態變量X=[xc,vc,xa,va],其中xc,xa分別為用戶過街和沿街的位置分量,vc,va分別為用戶過街和沿街的速度分量,建立系統的連續狀態方程
x(t)=Fx(t)+w(t).
(4)
設采樣周期為T,將系統連續的狀態方程離散化,得到系統離散的狀態方程為
Xk=Φk-1Xk-1+Wk-1,
(5)
式中,Φk-1為離散時間域的狀態轉移矩陣,其推導由連續時間域F推導,得到
(6)
(7)
2.2觀測方程建立
(8)
將觀測方程離散化,得到系統離散的觀測方程為
Zk=h(Xk)+Vk,
(9)
(10)
(11)
根據EKF遞推方程和所建立的系統狀態方程,可以得到系統的遞推濾波方程為
(12)
(13)
(14)
(15)
Pk=(I-KkHk)Pk,k-1,
(16)
遞推方程中的Φk,k-1,Qk由前面狀態方程得到,Hk由觀測方程得到,Rk與系統的觀測噪聲的協方差有關
(17)
(18)
(19)
2.3算法的實現流程
EKF-SM定位算法的系統框架如圖4所示,實現過程包括11個步驟,如圖4所示。
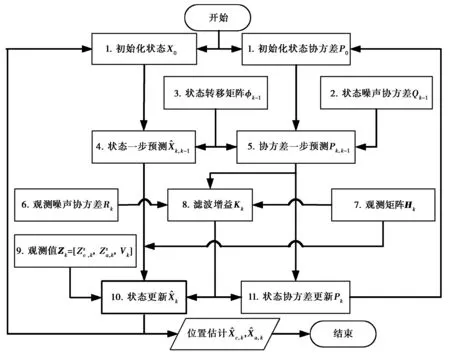
圖4 EKF-SM定位算法的系統框架
2) 狀態轉移矩陣計算:經式(6)得到轉移矩陣Φk-1;
3) 系統狀態噪聲協方差計算:經式(7)得到噪聲協方差Qk-1;

5) 在步驟2)和3)的基礎上進行狀態誤差協方差矩陣一步預測,經式(13)得到Pk,k-1;
6) 觀測矩陣更新:經式(11)得到Hk;
7) 觀測噪聲協方差矩陣更新:經式(17)得到噪聲方差Rk;
8) 在步驟5)、6)和7)的基礎上進行濾波增益計算,經式(14)得到噪聲方差Kk;
11) 狀態誤差協方差矩陣更新:經式(16)得到Pk,然后重復1)~11)步驟,直至更新結束。
3實驗驗證及結果分析
實驗所在的場景為華東交通大學15棟與16棟之間的峽谷環境,實驗路徑如圖5中A和B所示,初始位置A的坐標為(28°44′52.17875″N, 115°51′41.74564″E, 45.25m),終止位置B的坐標(28°44′52.72285″N, 115°51′43.54570″E, 45.12m),AB距離為83.27m,方位角為91.2°.其中峽谷寬度為15m,峽谷長度為50m;通過4臺南方S82RTK進行靜態聯測,獲取精確基準點A和B坐標,架設徠卡TS06全站儀在基準點A上測量A點到B點參考路線的基本信息;在A,B點及建筑外圍基準點上,利用全站儀測量建筑物各個特征頂點的坐標,建立3D建筑物輪廓模型,如圖6所示。
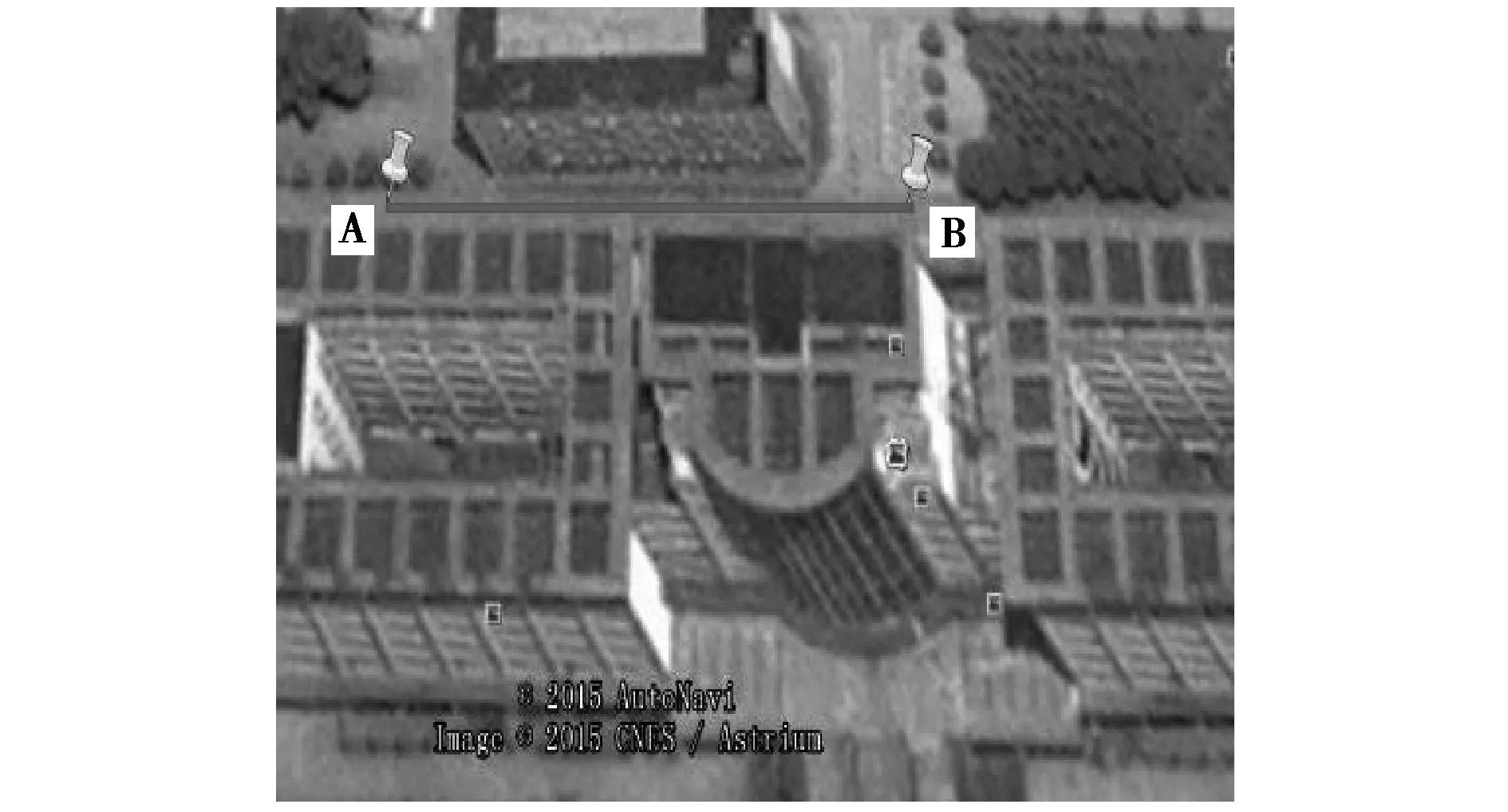
圖5 Google地球下測試路徑
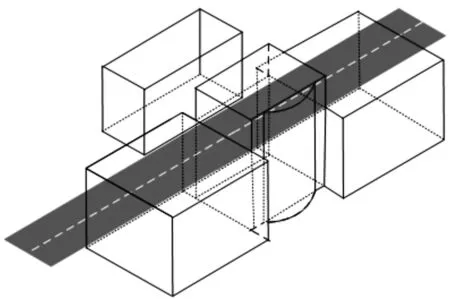
圖6 3D建筑輪廓模型
本次實驗基于SuperstarIIGPS接收機平臺,測試時間為2015年5月11日17:35:07-17:36:41,從GPS接收機輸出NMEA0183數據協議中共收集了95s的數據,包括位置、速度、可見衛星及其SNR等信息,其中,GPS速度信息是基于前后位置差分獲得,而實際測試平均速度為0.88m/s,通過統計,速度誤差結果如圖7所示,平均速度誤差為0.07m/s,除了峽谷中有個別異常值外,其它點趨于正常穩定,可以引入GPS速度信息作為觀測值。值得注意的是,在峽谷里受GPS觀測衛星影響,GPS輸出的位置發生偏移一定程度上導致沿街和過街方向的速度分量精度降低,但是獲取GPS合速度觀測值相對誤差較小,同樣本文也通過EKF融合算法對沿街和過街方向的速度進行估計。
為了獲取SNR經驗值來判斷實際觀測衛星是否可見。事先在Superstar-IIGPS接收機平臺上,同時間段內分別靜止采集了15棟周圍的空曠場景和城市峽谷間的衛星SNR值,數據長度為430s.通過統計SNR值,主要在24~50dB-Hz范圍內變化,以19、30號衛星為例,如圖8,圖9所示,在空曠場景下的SNR均值分別為43、46dB-Hz,最大值分別為46、50dB-Hz,最小值分別為為40、41dB-Hz;在城市峽谷中均值分別為33、35dB-Hz,最大值分別為39、40dB-Hz,最小值都為24dB-Hz.通過統計所有衛星的SNR值,將大于等于40的衛星視為可見,低于40視為不可見,為了排除一些異常值的干擾,可以通過統計某個時刻前5個SNR值的均值作為此刻SNR值,來判斷當前衛星是否可見。
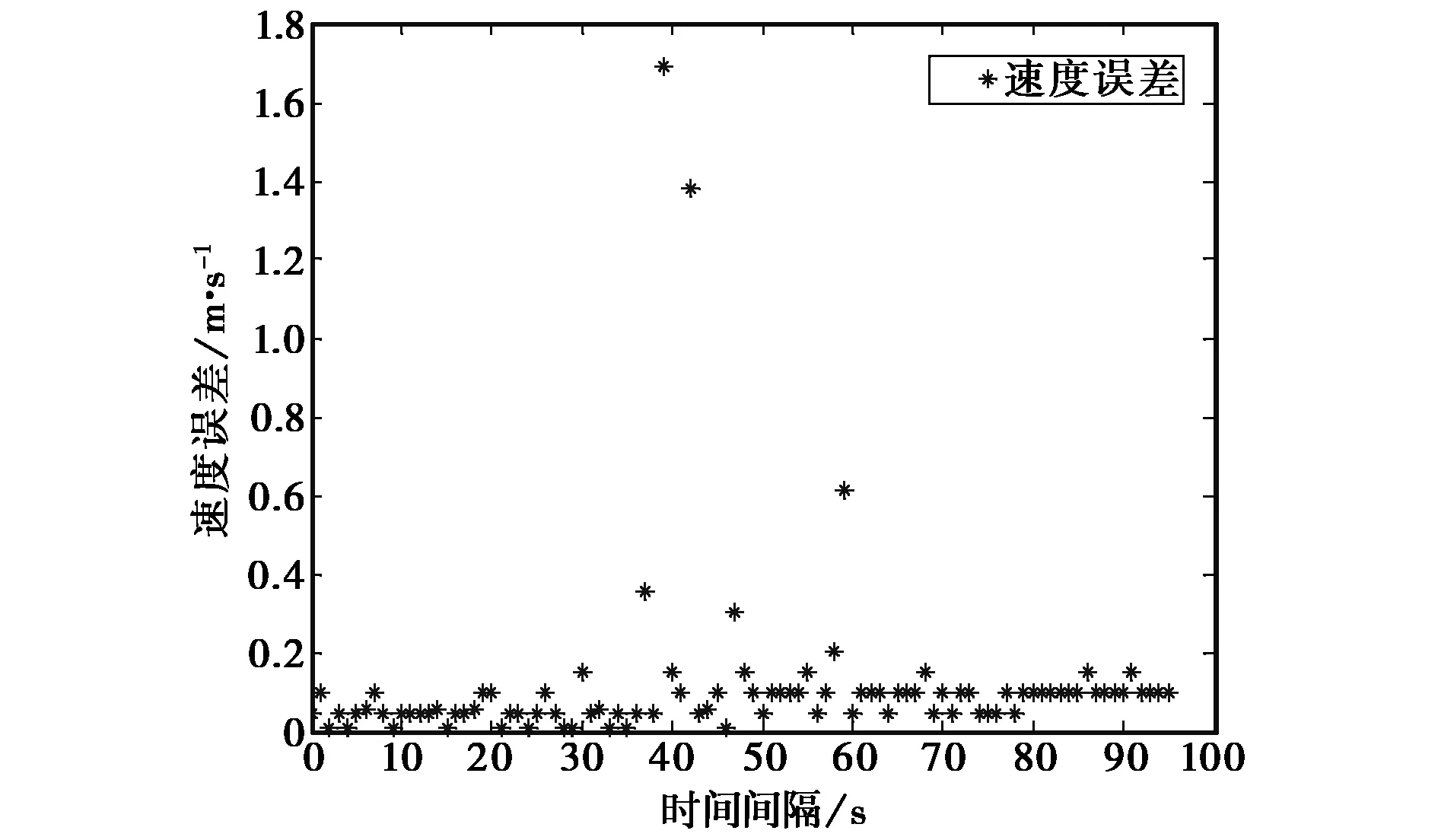
圖7 GPS速度誤差
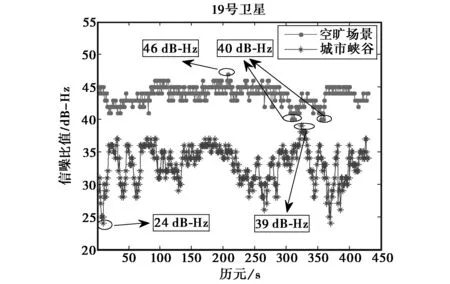
圖8 19號衛星信噪比值
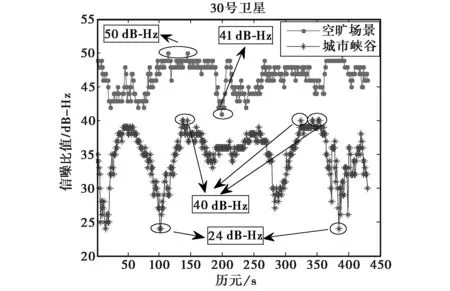
圖9 30號衛星信噪比值
通過前面擴展卡爾曼濾波設計過程,得到位置誤差結果,如圖10,圖11所示,圖10為沿街方向的誤差,圖11為過街方向的誤差,圖中三條曲線分別對應傳統GPS、KNN-SM算法、EKF-SM算法,表1示出了位置誤差的統計結果。
如圖10,圖11所示,接收機在峽谷前一段時間內,GPS定位結果相對穩定,但在38s后,隨著接收機深入峽谷里面,定位誤差開始增大,其中過街方向的誤差 比沿街方向變化要大,如表1所示,最大過街方向誤差為12.63m,最大沿街方向誤差為6.54m.

表1 位置誤差統計
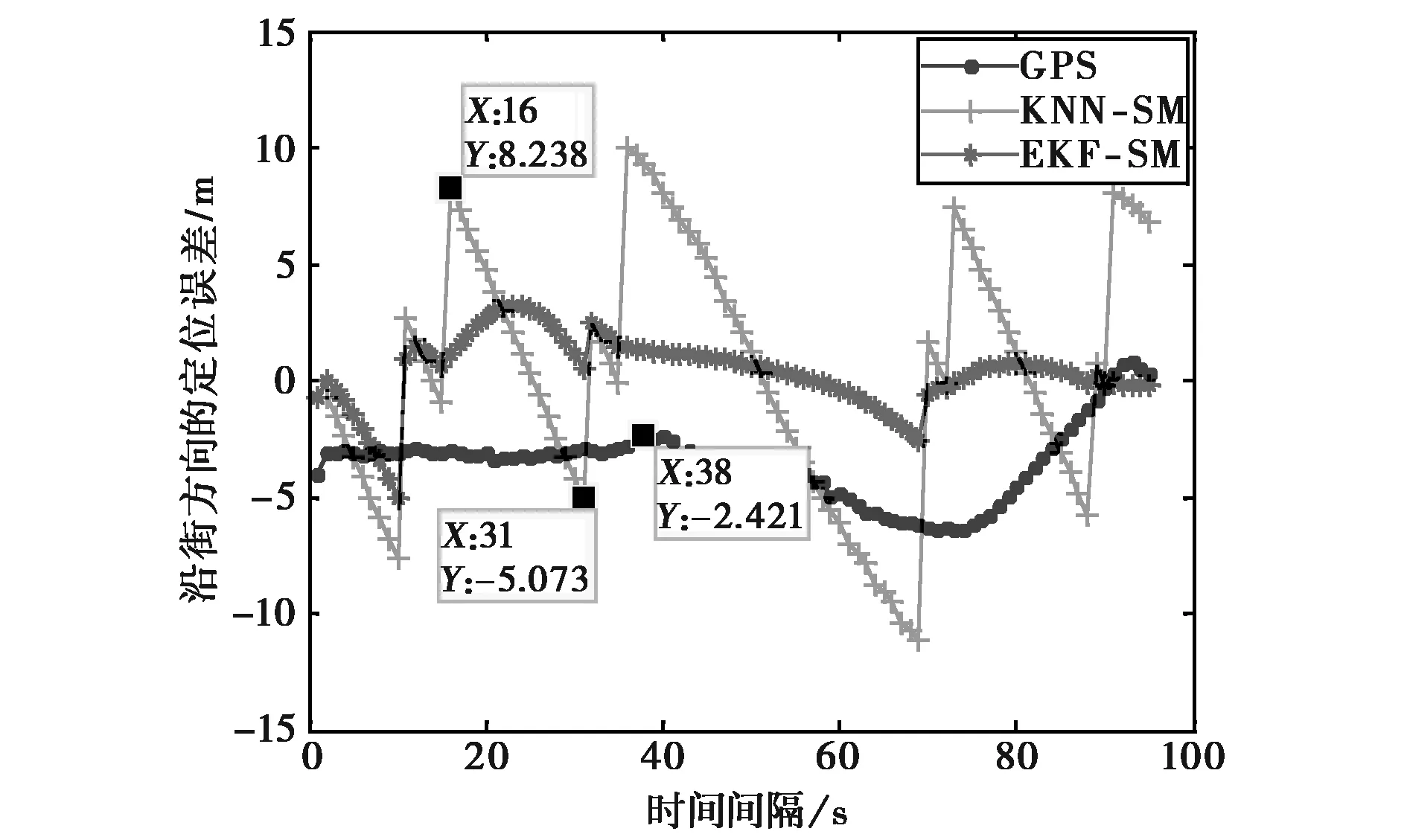
圖10 沿街方向的定位誤差

圖11 過街方向的定位誤差
KNN-SM定位在過街方向的絕對誤差明顯少于GPS,可以看出SM的優點是具有良好的過街方向精度,但是KNN-SM在沿街方向的誤差變化較大,呈鋸齒形分布,這是因為兩側建筑物幾何結構相近,隨著接收機的運動,造成結果在某些時間段內相同,使得KNN-SM定位結果不連續,以第16~31 s時間段為例,如圖12,圖13所示,圖12為第17 s時刻的匹配分值,圖13為第25 s時刻的匹配分值,圓點為真實位置,十字標記為KNN-SM定位結果,圖中看出這兩個時刻的搜索區域內的高分值不變,根據式(2)、式(3)計算,KNN-SM定位結果不變,同樣在第16~31 s內其他任意時刻KNN-SM的定位結果無明顯變化,因而隨著用戶真實運動,沿街方向的絕對誤差呈先減少后增大趨勢。
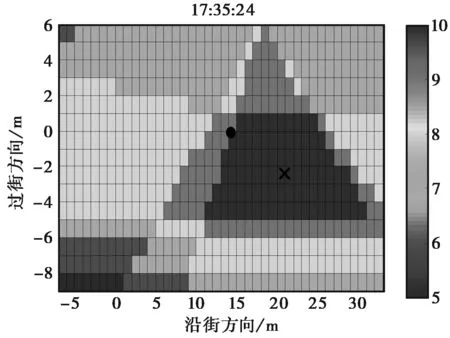
圖12 17:35:24匹配分值
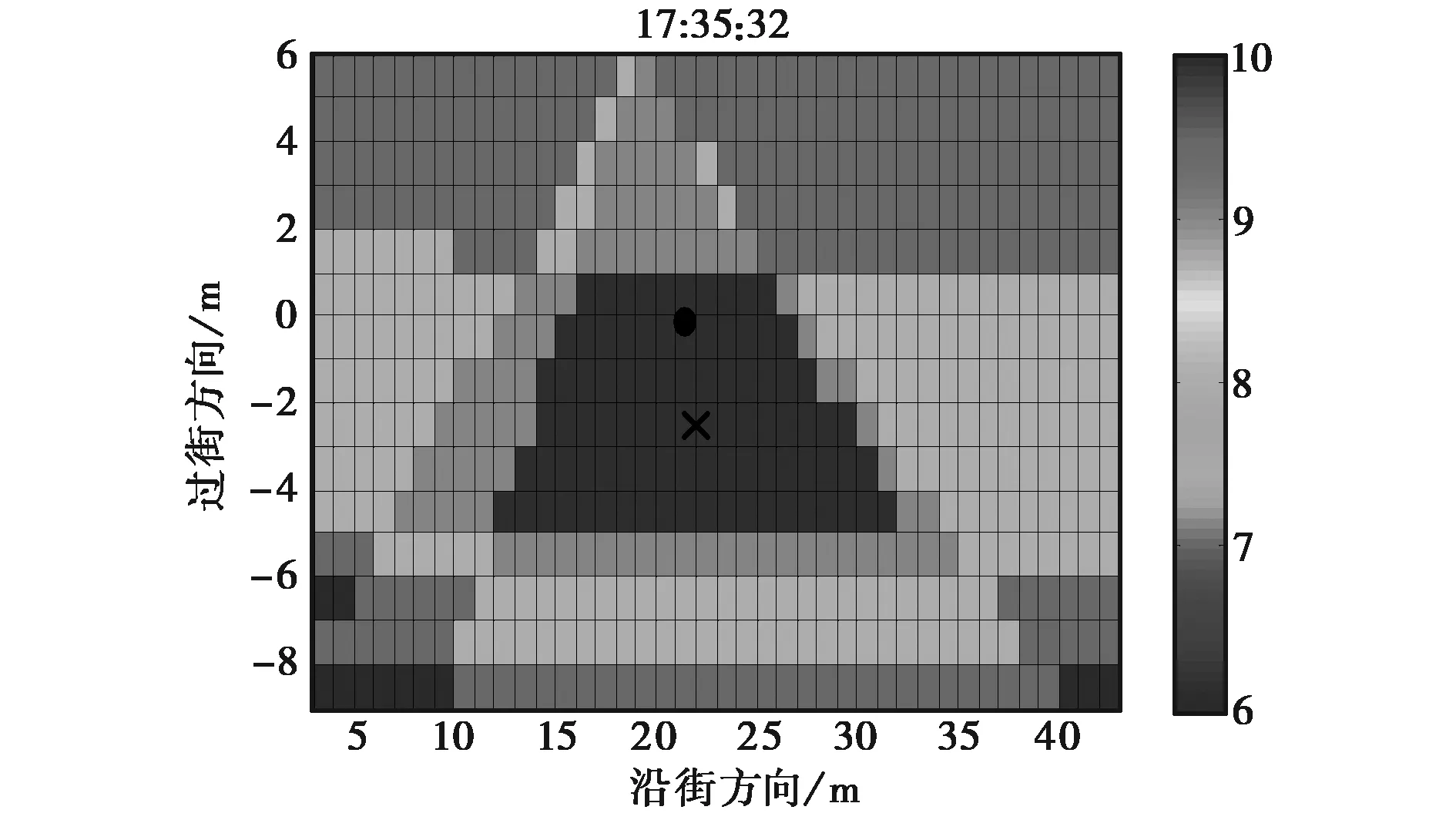
圖13 17:35:32匹配分值
在KNN-SM的定位基礎上,如圖10所示,EKF-SM的沿街定位精度較KNN-SM大幅度的提高,因為單獨的SM的定位結果在某些時間段固定不連續,誤差變化較大,此時一些時刻的沿街方向觀測值可信度較低,僅將位置結果作為觀測值,必定引入較大的觀測誤差,影響位置估計結果,而通過引入了可靠GPS速度信息的進行EKF融合,從建立的系統模型公式(5) 、(9)可以看出,融合速度信息可以更優的對位置狀態量進行校正,改善一些可信度較低的位置觀測值對狀態估計帶來的影響,從實驗結果來看獲取較優的估計結果,使不連續的SM定位結果變得連續可靠。
同時,從實驗統計結果看出,如表1所示,EKF-SM在沿街方向的平均絕對偏差為1.18 m,比傳統GPS的3.58 m和KNN-SM的4.34 m,分別降低了67.0%和72.8%;EKF-SM在過街方向的平均絕對偏差為1.70 m,KNN-SM為1.48 m,相比GPS的4.86 m,兩者精度都提高了3 m以上。實測結果表明:EKF-SM擁有與KNN-SM相近過街方向的精度,同時提高了沿街方向的精度。
4結束語
本文闡述了陰影匹配算法的實現過程,針對陰影匹配算法在沿街方向定位精度不足的問題,提出一種基于EKF的GPS/SM的組合定位算法,完成了系統的狀態方程和觀測方程模型建立,并推導了EKF-SM算法的實現流程。在城市峽谷環境中,基于Superstar-II GPS接收機平臺上進行實測驗證,結果表明,相比傳統GPS和陰影匹配算法,EKF-SM算法既保證了用戶設備過街方向的精度,同時提高了沿街方向的定位精度,定位結果更具有連續性和精確性。
參考文獻
[1] 趙爽.基于智能天線的陰影匹配技術[J]. 北京聯合大學學報·自然科學版, 2013, 27(1):1-6.
[2] JIANG Z,GROVES P D,OCHIENG W,etal.Multi-constellation GNSS multipath mitigation using consistency checking[C].//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 2011,28(2):3889-3902.
[3] GROVES P D.Shadow matching: A new GNSS positioning technique for urban canyons[J]. Journal of Navigation, 2011, 64(03):417-430.
[4] GROVES P D, WANG L, ZIEBART M.Shadow matching:Improved GNSS accuracy in urban canyons[J].GPS World, 2012,23(2):14-18.
[5] WANG L, GROVES P D, ZIEBAR M.GNSS shadow matching:Improving urban positioning accuracy using a 3D city model with optimized visibility prediction scoring[C].//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 2012, 137(1):423-437.
[6] WANG L,GROVES P D,ZIEBART M K.Shadow Matching:Improving smartphone GNSS positioning in urban environments[C].//China Satellite Navigation Conference (CSNC) 2013 Proceedings.Springer Berlin Heidelberg,2013:613-621.
[7] WANG L, GROVES P D, ZIEBART M K.Shadow Matching: Improving Smartphone GNSS Positioning in Urban Environments [C].// Proceedings of China Satellite Navigation Conference (CSNC),2013:613-621.
[8] WANG L.Kinematic GNSS shadow matching using particle filter[C].//Proceedings of the 27th International Technical Meeting of the ION Satellite Division.ION GNSS+2014.Tampa, Florida,2014:1907-1919.
[9] 萬德鈞,房建成.GPS動態濾波的理論、方法及其應用[M].南京:江蘇科學技術出版社,2000.
[10]付夢印,鄧志紅,張繼偉,等.Kalman濾波理論及其在導航系統中的應用[M].北京:科學出版社,2010.
胡輝(1970-),男,江西南昌人,博士,教授,主要研究方向為衛星導航定位,并行算法與并行處理,機器視覺。
顏瑜軍(1990-),男,湖南衡陽人,碩士,主要研究方向為衛星導航定位。
歐敏輝(1990-),男,湖南株洲人,碩士,主要研究方向為衛星導航定位。
A Novel GPS/SM Integrated Positioning Algorithm Based on EKF
HU Hui,YAN Yujun,OU Minhui
(SchoolofInformationEngineering,EastChinaJiaotongUniversity,Nanchang330013,China)
Abstract: The geometrical structure of both sides of the building is similar in urban canyons, shadow matching algorithm is difficult to ensure positioning accuracy in the along-street direction. To solve this problem, this paper introduces GPS speed information on the basis of the shadow matching algorithm, proposes a novel GPS/SM integrated positioning algorithm based on EKF. In the experimental verification, the proposed algorithm improves the along-street accuracy with a mean absolute deviation of 1.18 m, with a 67.0% and 72.8% reduction compared to the traditional GPS with 3.58 m and the shadow matching algorithms with 4.34m.
Keywords:GPS; urban canyon; shadow matching; extended kalman filter
doi:10.13442/j.gnss.1008-9268.2016.02.002
收稿日期:2015-06-10
中圖分類號:P228.4
文獻標志碼:A
文章編號:1008-9268(2016)02-0007-08
作者簡介
資助項目: 江西省自然科學基金(批準號:20142BAB207001); 江西省教育廳科學技術研究項目(編號:GJJ14369)
聯系人: 顏瑜軍 E-mail:gnss523@163.com
