基于Agent的導航星座自主運行仿真建模方法
2016-06-22 10:15:56冷如松聞德保黃文德
全球定位系統(tǒng) 2016年2期
冷如松,聞德保,黃文德
(1.長沙理工大學 交通運輸工程學院,長沙 410010;2.國防科技大學機電工程與自動化學院,長沙 410073;3.中國科學院上海天文臺,上海 200030)
基于Agent的導航星座自主運行仿真建模方法
冷如松1,2,聞德保1,黃文德2,3
(1.長沙理工大學 交通運輸工程學院,長沙 410010;2.國防科技大學機電工程與自動化學院,長沙 410073;3.中國科學院上海天文臺,上海 200030)
摘要:針對傳統(tǒng)建模方法在滿足自主運行中實體之間龐大的通信與測量需求方面存在的不足,本文基于Agent仿真建模理論,研究建立滿足導航星座自主運行仿真建模要求的方法。首先提出自主運行系統(tǒng)仿真建模的Agent體系結構,然后利用Agent具有推理和規(guī)劃能力、能快速處理復雜問題的優(yōu)點,設計導航星座中各級實體的Agent結構與功能組成,最后以協(xié)議棧Agent建模的方式建立整個自主運行系統(tǒng)的通信與測量機制。仿真結果表明,該體系能處理自主運行系統(tǒng)中諸多實體之間的通信與測量問題,對導航星座自主運行系統(tǒng)的開發(fā)具有一定的參考價值。
關鍵詞:導航星座;自主運行代理;仿真建模;協(xié)議棧
0引言
在自主運行模式下,衛(wèi)星導航系統(tǒng)空間段(導航星座)通過星間雙向測量與通信,可以進行自主星歷更新與時間同步,在沒有地面支持的情況下仍可為用戶提供一定精度的導航定位服務。相對于傳統(tǒng)由地面控制與管理的運行方式,自主運行模式可以減少地面站的數(shù)量,降低系統(tǒng)長期維持費用,增強系統(tǒng)生存能力、改善系統(tǒng)性能和提高導航定位精度等[1]。因此,自主運行相關技術的研究在國內(nèi)外得到了廣泛的關注[2-4]。但是導航星座自主運行系統(tǒng)是一個復雜系統(tǒng),如何驗證導航星座自主運行關鍵技術的可行性、提前識別和控制系統(tǒng)中的不確定因素,是導航星座自主運行急需解決的問題之一。本文提出利用仿真建模手段,對導航星座自主運行的運行策略、星座規(guī)模等進行仿真,其目的是以經(jīng)濟實用的方法實現(xiàn)導航星座自主運行關鍵技術的地面試驗驗證。
面向?qū)ο蟮姆抡娼7椒ㄒ约胺植际綄崿F(xiàn)方式是處理仿真建模問題的常用手段。面向?qū)ο蟮慕7椒梢詾橄到y(tǒng)與用戶之間提供更直觀的交互方式,提高仿真系統(tǒng)的可維護性和可拓展性;分布式的實現(xiàn)方式則提高了建模方法數(shù)值運算效率。賀勇軍等基于開發(fā)了“多衛(wèi)星系統(tǒng)綜合效能仿真分析軟件”[5],高黎等對分布式衛(wèi)星系統(tǒng)自主運行技術進行了研究[6],胡圣波等研究了基于模型的航天器自主運行執(zhí)行體[7],但對于自主運行系統(tǒng)中最體現(xiàn)自主性和智能性的規(guī)劃和調(diào)度功能[8]而言,以上方法已經(jīng)不能滿足自主運行系統(tǒng)對自主性、智能性的要求,不能很好地解決自主運行中的自主規(guī)劃調(diào)度以及系統(tǒng)中衛(wèi)星、地面站、接收機等數(shù)目眾多的實體之間的測量、通信等問題。基于Agent的建模與仿真方法(ABMS)是近期涌現(xiàn)出的最有潛力的仿真建模方法之一,它是一種針對自治、互動Agent組成的系統(tǒng)的建模方法[9-11]。ABMS建立的模型融合了面向?qū)ο蠼5膬?yōu)點使Agent具有對象的優(yōu)點,同時有Agent的系統(tǒng)還具有更好的容錯、低耗費、計算高效等特點。ABMS為自主運行系統(tǒng)的建模提供了一條新的思路。
本文基于Agent建模與仿真的理論框架下探討了面向Agent的導航星座自主運行的仿真方法,給出了基于Agent思想的簡易建模過程和簡單運行流程,最后以24/3/1的Walk星座的仿真為例,說明此體系研究自主運行的方案是可行的。
1自主運行系統(tǒng)仿真建模的Agent體系結構
確定體系結構是建立仿真系統(tǒng)的基礎,由于自主運行系統(tǒng)是龐大且復雜的系統(tǒng),本文將自主運行系統(tǒng)的體系結構分為層次關系、模塊劃分兩個方面來進行描述,其中自主運行系統(tǒng)的層次關系主要通過系統(tǒng)中各實體的所屬職能進行劃分,在此基礎上根據(jù)軟件設計目的以及仿真實驗特點進行模塊劃分。
1.1自主運行層次劃分
按照自主運行系統(tǒng)的不同的職能要求,自主運行系統(tǒng)框架可以大致分為三個層次:規(guī)劃層、執(zhí)行層和應用層,自主運行系統(tǒng)應該遵循如圖1所示的基本框架。
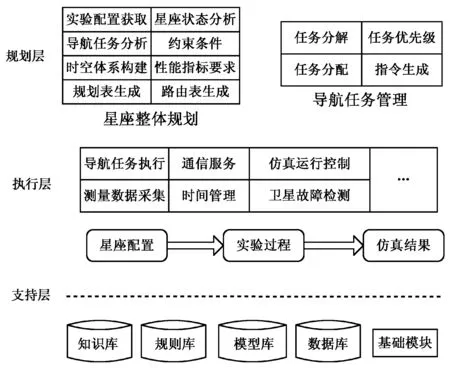
圖1 自主運行系統(tǒng)層次劃分
1) 規(guī)劃層
規(guī)劃層的主要職能是導航任務管理和形成星座的整體規(guī)劃。
星座整體規(guī)劃:星座整體規(guī)劃是規(guī)劃層根據(jù)實驗配置、星座狀態(tài)、導航任務以及本次實驗的約束條件來構建相應時空體系、生成實現(xiàn)性能指標要求的規(guī)劃表、路由表等規(guī)劃的過程。
導航任務管理:導航任務是由實驗任務轉換而來,經(jīng)過任務分解、分析任務執(zhí)行的優(yōu)先級生成指令并分配給執(zhí)行層等一系列流程就是系統(tǒng)的任務管理功能。
2) 執(zhí)行層
執(zhí)行層主要職能是維持星座整體正常運轉,主要包括時間管理、通信服務、故障檢測、任務執(zhí)行、數(shù)據(jù)采集和仿真運行控制等功能。
時間管理:負責保證自主運行系統(tǒng)以適當?shù)姆绞竭M行時間推進。
通信服務:提供自主運行系統(tǒng)中各實體間消息的收發(fā)、重傳、封裝、解釋等服務。
衛(wèi)星故障檢測:提供自主運行系統(tǒng)中衛(wèi)星或地面站等設備的健康狀態(tài)指標。
任務執(zhí)行:負責具體執(zhí)行規(guī)劃層分配的任務,①數(shù)據(jù)采集:收集用戶感興趣的仿真數(shù)據(jù),并完成仿真數(shù)據(jù)的統(tǒng)計。②仿真運行控制:發(fā)送各種控制指令如開始、暫停等以控制自主運行系統(tǒng)的運行進程。
3) 支持層
支持層分為實驗支持和模塊支持兩個部分,其中實驗支持主要負責完成實驗配置、監(jiān)測試驗過程以及評估實驗結果;模塊支持負責提供組成系統(tǒng)的基礎模塊以及這些基礎模塊所需要的如知識庫、數(shù)據(jù)庫、模型庫、規(guī)則庫之類的庫。
1.2自主運行模塊劃分
自主運行仿真系統(tǒng)需要仿真各種不同星座、環(huán)境等配置來獲得這些配置下運行策略的優(yōu)劣對比,出于這個目的,系統(tǒng)除了應該遵循基本框架外還需要受到軟件設計以及仿真實驗要求提供的建模約束:
1) 系統(tǒng)應該通過簡潔的方式實現(xiàn)系統(tǒng)與外界交互,因此需要能獲取系統(tǒng)內(nèi)所有實體信息并與外界交互的模塊。
2) 系統(tǒng)需要配置不同的星座來試驗某種運行策略在不同星座的運行效率,衛(wèi)星是星座的基本組成單位,因此系統(tǒng)中應該具備代表實際物理環(huán)境中衛(wèi)星的實體,以便管理任務進程。
3) 衛(wèi)星需要根據(jù)給定的規(guī)劃在適定時間完成相應的任務,因此要求衛(wèi)星內(nèi)部有時間模塊等功能模塊。
4) 系統(tǒng)與衛(wèi)星之間、衛(wèi)星與衛(wèi)星之間、衛(wèi)星中的模塊與模塊之間都需要實現(xiàn)信息交互,因此要求具有相應的信息傳遞通道。
基于以上建模約束,以自主運行系統(tǒng)的層次關系為基礎可將自主運行系統(tǒng)的模塊劃分,如圖2所示。圖中的模塊按照模塊結構的復雜程度以及一定的從屬關系劃分,自上至下模塊的復雜程度由高到低。星座Agent需要完成規(guī)劃層、執(zhí)行層和支持層的職能,它是整個系統(tǒng)中最復雜的模型,它主要負責總體協(xié)調(diào)管理星座的衛(wèi)星,能夠隨時查看衛(wèi)星級Agent、地面站和導航用戶的運行情況,對自主運行任務進行分解發(fā)送給其他衛(wèi)星并與外界進行交互。
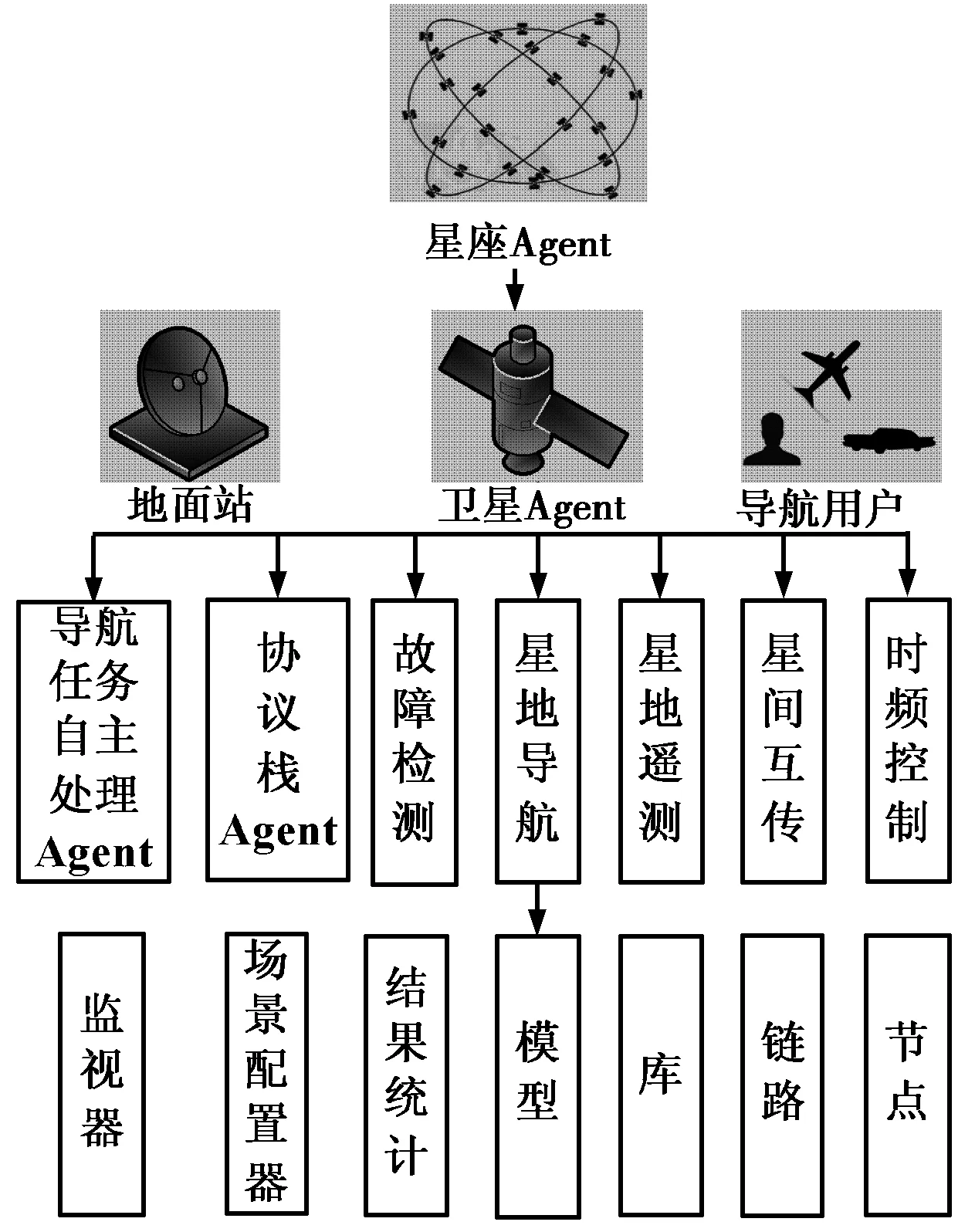
圖2 自主運行系統(tǒng)模塊結構劃分
衛(wèi)星Agent是直接受星座級Agent管理的模塊,主要完成執(zhí)行層和支持層的職能,以衛(wèi)星級Agent主要包含導航任務自主處理Agent、協(xié)議棧Agent、故障檢測、星地導航、星地遙測、星間互傳、時頻控制等模塊。導航用戶是具有接受衛(wèi)星下發(fā)的導航電文能力。地面站能夠形成星座建鏈規(guī)劃、對衛(wèi)星星座發(fā)出遙控指令、接收衛(wèi)星下發(fā)的導航信息和遙測信息并綜合分析。
節(jié)點、鏈路等模塊主要完成支持層的職能,節(jié)點是自主運行體系中除支持層外的模塊最基本的組成單位,節(jié)點由地址分類器和端口分類器兩部分構成。節(jié)點的地址分類器與鏈路連接,當數(shù)據(jù)通過節(jié)點時由地址分類器將其發(fā)送到相應的鏈路上去。端口分類器與其他部件連接,通過在節(jié)點基礎上掛載其他部件的方式形成模塊、衛(wèi)星Agent等實體。節(jié)點之間通過鏈路來建立信息傳遞通道,鏈路提供傳輸時延、帶寬、丟包率等接口供用戶配置成不同鏈接方式。
2自主運行系統(tǒng)各層級Agent的建模方法
對于前文提到不同類型的Agent需要不同的建模方式以支持它實現(xiàn)設計目的,按照功能和結構復雜程度不同可以將模型分為星座級Agent模型、衛(wèi)星級Agent模型、元素級Agent模型。
2.1星座級Agent建模方法
星座級Agent對應星座內(nèi)某顆衛(wèi)星,這顆衛(wèi)星是整個星座的調(diào)度和信息中心,因此星座級Agent具有兩個方面的屬性,一方面作為星座級Agent,它具有單方面獲取星座內(nèi)其他所有Agent信息并監(jiān)控其他Agent、具有接收并處理衛(wèi)星級Agent反饋信息的能力,以及產(chǎn)生星座的全局規(guī)劃的能力,它能通過傳感器感知外界信息包括命令、任務等,星座運行狀態(tài)可能因外界信息而改變,一旦狀態(tài)改變則通過協(xié)議棧和鏈路通知其他Agent,更新的狀態(tài)存儲在狀態(tài)池,并因之進行規(guī)劃,最后做出決定并由效應器來執(zhí)行。另一方面,星座級Agent本質(zhì)上是星座內(nèi)的一顆衛(wèi)星,具備衛(wèi)星級Agent的一切屬性。
圖3示出了星座級Agent的模型結構,具有監(jiān)視器模塊、自主規(guī)劃模塊、任務分解模塊以及指令生成模塊等衛(wèi)星Agent不具備的模塊。星座級Agent的六大部件包括傳感器、執(zhí)行器、狀態(tài)池、知識庫、自主規(guī)劃以及決策器。其中星地遙測模塊、星地導航模塊、星間互傳模塊都包含接收信息和發(fā)送信息兩個過程,因此既屬于傳感器也屬于執(zhí)行器。星座級Agent中使用協(xié)議棧Agent作為傳輸?shù)暮诵?能夠?qū)π亲w進行信息收集、將星座級Agent生成的任務發(fā)送給各顆衛(wèi)星。
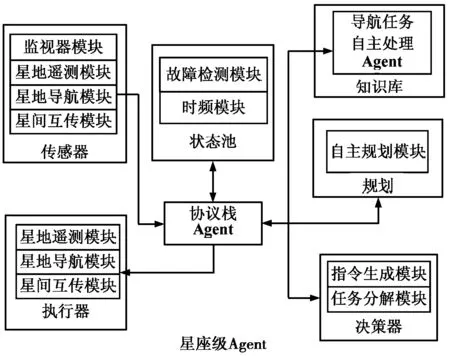
圖3 星座級Agent結構圖
2.2衛(wèi)星級Agent建模方法
衛(wèi)星級Agent屬于衛(wèi)星星座中的普通個體,作為這個級別的Agent既要與星座級Agent交互,也要與其他衛(wèi)星級Agent進行通信,衛(wèi)星級Agent具有維持本星正常運作、能對地播發(fā)導航電文和遙測電文、進行星間測距并完成星間數(shù)據(jù)互傳、根據(jù)星座級Agent分派的任務進行本地規(guī)劃等能力。如圖4所示,衛(wèi)星級Agent由兩個元素級Agent和時頻控制模塊、星間互傳模塊、星地導航模塊、星地遙測模塊以及故障檢測模塊等一系列模塊組成。

圖4 衛(wèi)星級Agent結構圖
導航任務自主處理模塊是衛(wèi)星級Agent中負責存儲數(shù)據(jù)、簡單數(shù)據(jù)處理以及根據(jù)接收到的任務完成本地規(guī)劃的模塊。衛(wèi)星中的星間互傳模塊(星地導航模塊、星地遙測模塊)按照一定時間間隔向協(xié)議棧模塊發(fā)送請求,協(xié)議棧模塊通過向時頻控制模塊請求時間、向故障檢測模塊請求衛(wèi)星健康狀態(tài)、向?qū)Ш饺蝿兆灾魈幚鞟gent請求可見性、建鏈、路由、傳輸時延等信息,然后通過這些返回的信息進行綜合判斷,將所請求發(fā)送的信息組幀發(fā)送給星間互傳模塊和導航任務自主處理Agent(用于記錄)并將通信所用的速率、傳輸時延、誤碼模型、通信協(xié)議設置到鏈路,最后星間互傳模塊通過鏈路將信息發(fā)往目標節(jié)點。
2.3元素級Agent建模方法
元素級Agent負責接收衛(wèi)星級Agent分配的任務,執(zhí)行并上傳任務完成狀況,元素級Agent主要分為導航任務自主處理Agent和協(xié)議棧Agent。前者主要用于處理跟導航業(yè)務相關的數(shù)據(jù)處理及存儲,形成衛(wèi)星本地任務規(guī)劃;后者主要負責自發(fā)處理星地、星間信息組幀、解幀、發(fā)送、接收等一系列保證衛(wèi)星星座正常通信的行為以及衛(wèi)星級Agent內(nèi)各組件及衛(wèi)星級Agent之間信息交流。兩者雖然功能各異但內(nèi)部結構類似,下圖為導航任務自主處理Agent結構以及信息處理流程。如圖5所示,信息進入導航任務自主處理Agent后的處理流程如下:
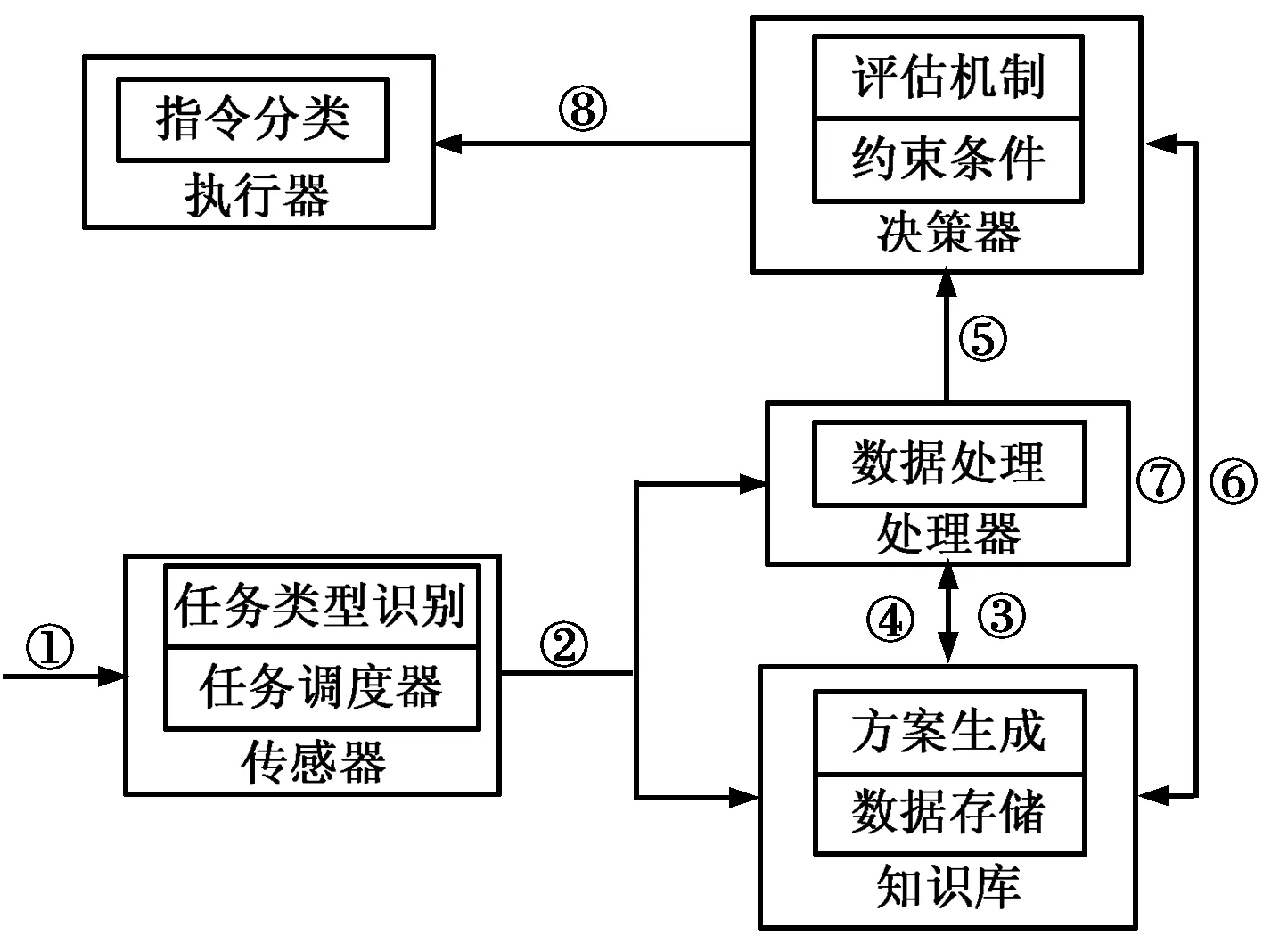
圖5 導航任務自主處理Agent結構
1) 導航任務自主處理Agent接收信息后發(fā)送到傳感器中,傳感器中通過任務類型識別模塊將任務劃分優(yōu)先級并存入任務調(diào)度器模塊中。
2) 任務調(diào)度器(先進先出)將堆頂?shù)娜蝿瞻l(fā)送給處理器和知識庫。
3) 知識庫開辟存儲空間存儲進入的消息并將相關算法發(fā)送給處理器。
4) 處理器根據(jù)知識庫提供的算法進行數(shù)據(jù)處理并將處理的結果發(fā)送給知識庫和決策器。
5) 決策器收到處理器發(fā)送的消息后向知識庫請求先驗信息和可執(zhí)行方案。
6) 知識庫向決策器提供多種方案及相關的先驗信息。
7) 決策器通過處理器處理后的信息和知識庫中提交的先驗信息作為約束條件進行計算,經(jīng)過評估分析之后確定最終將執(zhí)行的方案,并將方案發(fā)送至知識庫
8) 決策器將方案發(fā)送給執(zhí)行器,執(zhí)行器對方案形成指令并進行分類,并將其發(fā)送至相應目標。
3基于協(xié)議棧Agent模型的自主運行系統(tǒng)工作流程
協(xié)議棧Agent作為衛(wèi)星級Agent中的核心組件之一,主要負責信息的處理和中轉。衛(wèi)星級Agent的各組件之間的所有信息以及外部信息都通過協(xié)議棧Agent來傳遞。圖6是導航星座自主運行系統(tǒng)的完成來自地面站的信息經(jīng)過衛(wèi)星中轉最終抵達另一地面站的工作流程示意圖。
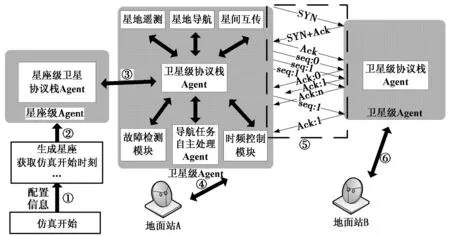
圖6 以衛(wèi)星協(xié)議棧為核心的工作流程示意圖
1) 自主運行系統(tǒng)根據(jù)仿真開始前設置的配置信息完成導航星座的生成以及獲取仿真開始時刻、獲取導航任務等。
2) 系統(tǒng)將生成的數(shù)據(jù)傳遞給星座級Agent完成星座級Agent的激活,星座級Agent內(nèi)部的自主規(guī)劃模塊進行星座整體的規(guī)劃和建鏈。
和我一起發(fā)蒙的一共有十一個人,有茄子,螃蟹,屎克郎,屁斑蟲,雀尕兒,土豆等等,算是同班同學了。別看學校又破又小,可也有校霸班霸,這跟監(jiān)獄里有獄霸一樣,正常。那時,我們學校主要有兩霸,一是螃蟹,二是屎克郎。螃蟹他爹是我們村支書,算是高干子弟,派頭無形中就大,動不動就說要讓他爹把誰捆起來戴高帽子游斗,我們沒理由不怕他。屎克郎雖然不是高干子弟,也不造事欺負人,但有個叔叔在東北當著解放軍,一人參軍全家光榮了,我們不得不敬他。有了這兩個因素,大家一般都圍著他倆轉,跟他倆玩。我也想圍著他倆轉跟他倆玩,可螃蟹不許,他說我是個野種,不配。
3) 星座級Agent將星座整體任務分解為單獨衛(wèi)星任務并發(fā)送給各顆衛(wèi)星,同時星座中的衛(wèi)星級衛(wèi)星被激活。
4) 地面站向衛(wèi)星發(fā)送信息并得到反饋,信息被星地遙測或星地導航模塊所接收,轉發(fā)給協(xié)議棧Agent,協(xié)議棧Agent獲取衛(wèi)星健康狀態(tài)、當前時間后開始對信息進行解析,若信息的目的端是本星,則將信息發(fā)送給導航任務自主處理Agent處理并存儲;若信息的目的端不是本星,則像導航任務處理Agent請求相關的建鏈路由策略,計算出接收信息的下一節(jié)點,協(xié)議棧Agent通過把信息編碼為星間信息格式,等待星間互傳模塊發(fā)送給下一目的地。
5) 衛(wèi)星將非本星的數(shù)據(jù)傳遞給下一衛(wèi)星。衛(wèi)星與衛(wèi)星之間的通信服務分為完全可靠、高可靠和低可靠三種服務。圖6中黑色虛線框內(nèi)是通信采用完全可靠的連接服務時,需要進行三次握手建立連接的流程,第一次握手是源衛(wèi)星發(fā)給目的衛(wèi)星的SYN包,等待目的衛(wèi)星進行確認。第二次握手是目的衛(wèi)星收到SYN包進行確認后發(fā)送一個SYN+ACK包給源衛(wèi)星,第三次握手是源衛(wèi)星收到目的衛(wèi)星發(fā)送回來的SYN+ACK包后,再向目的衛(wèi)星發(fā)送確認包ACK。三次握手后衛(wèi)星間進入“連接已建立”狀態(tài),然后可以開始傳送數(shù)據(jù)。若傳送數(shù)據(jù)時源衛(wèi)星未收到目的衛(wèi)星回傳的ACK確認包,則在一定時間后重新發(fā)送數(shù)據(jù)。
6) 衛(wèi)星將信息發(fā)送給目標地面站,并得到反饋。
4仿真及結果分析
本文基于以上研究仿真了24/3/1的Walk星座(星座包括24顆衛(wèi)星, 均勻分布在3個軌道平面上,相鄰軌道面間對應衛(wèi)星之間的相位角系數(shù)為1),六個軌道面上的衛(wèi)星編號分別為11-18,21-28,31-38.軌道高度為22 000 km,傾角為55°,采用的數(shù)據(jù)發(fā)送終端為北京站(約為北緯39.9°,東經(jīng)116.4°)數(shù)據(jù)從北京站發(fā)送給當時境內(nèi)距站最近的衛(wèi)星,衛(wèi)星判斷數(shù)據(jù)不是發(fā)給本星,經(jīng)過處理后發(fā)送給下一個節(jié)點,如此再三,直到接收終端紐約站(約為北緯40.9°,西經(jīng)73.9°)接收到數(shù)據(jù)為止,仿真參數(shù)如表1所示。
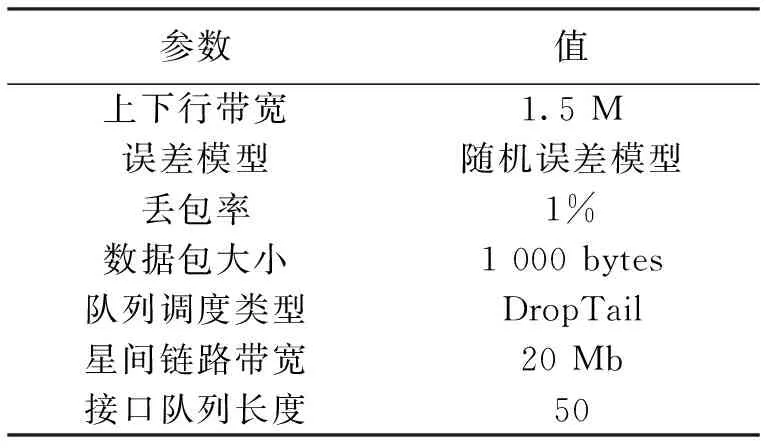
表1 仿真參數(shù)表
仿真開始時衛(wèi)星星下點軌跡和地面站的分布如圖7所示
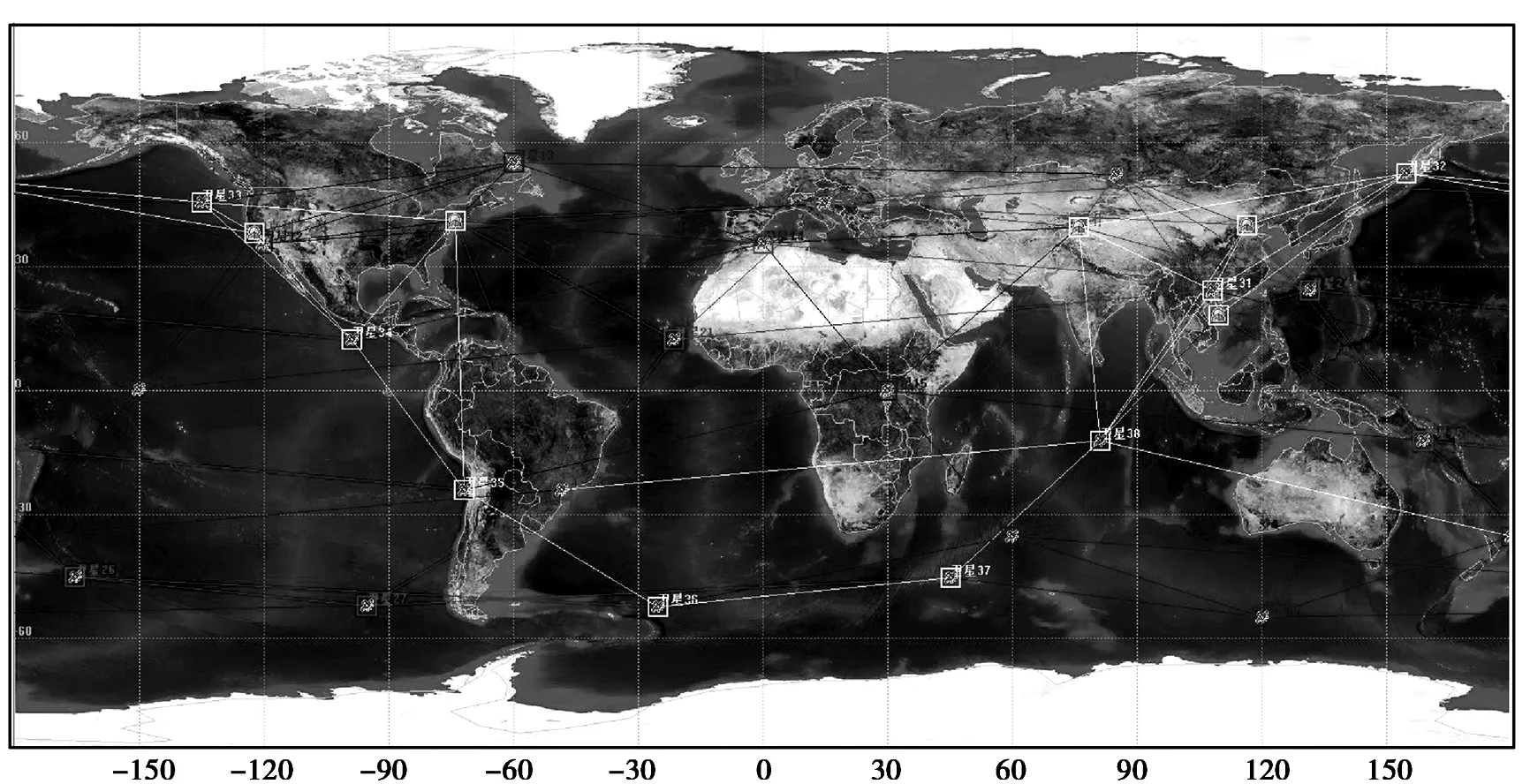
圖7 仿真配置
圖8是Walk星座配置采用不同傳輸協(xié)議進行600 s仿真時的平均吞吐量隨時間變化的示意圖。
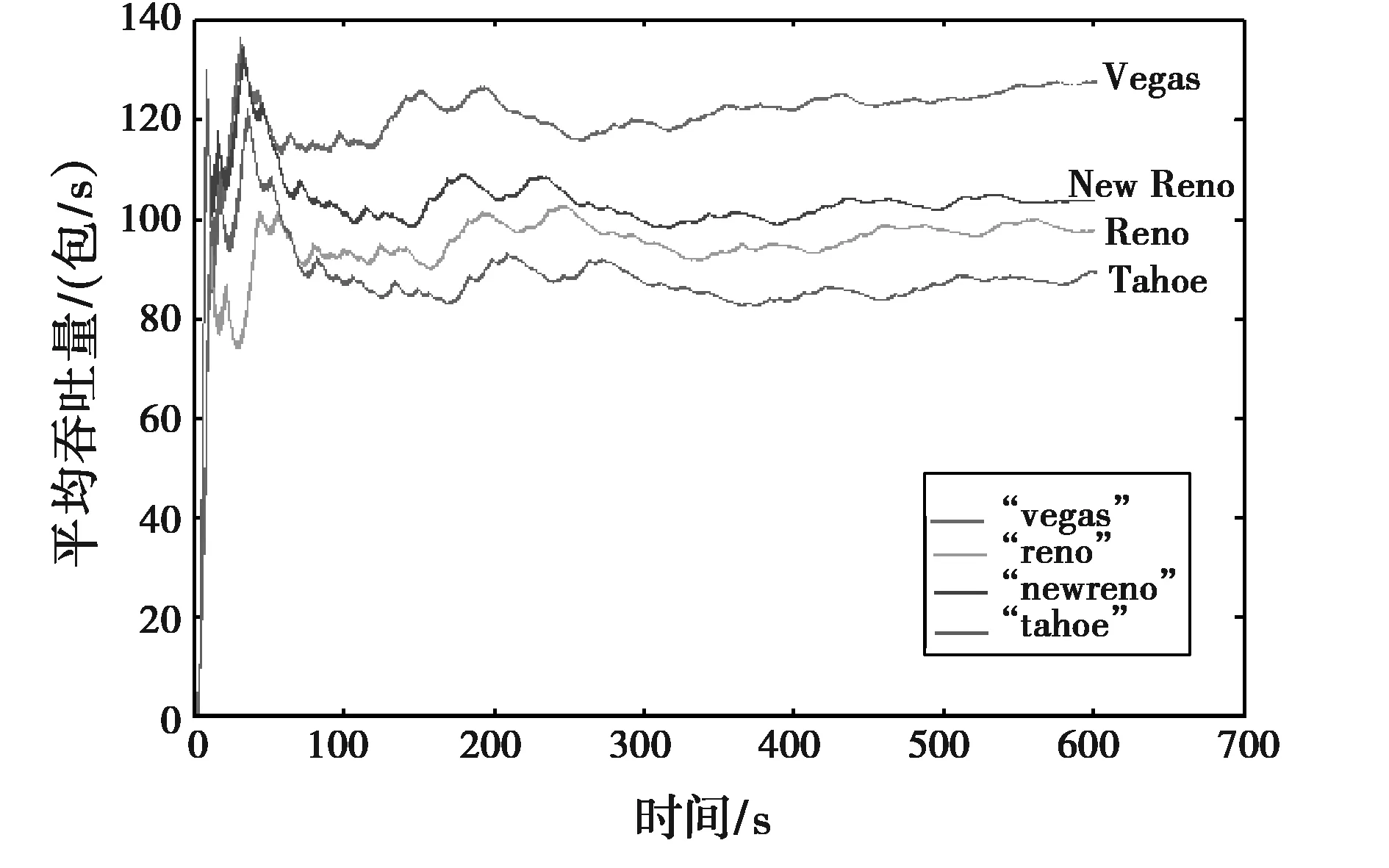
圖8 平均吞吐量隨時間變化示意圖
此時丟包率采用的是1%,采用的協(xié)議分別為Vegas、Reno、New Reno、Tahoe.除協(xié)議外其他部分均一致,如圖所示,可以發(fā)現(xiàn)Tahoe協(xié)議在丟包率較低的時候比其他協(xié)議更快達到平均吞吐量的最大值,采用Vegas協(xié)議時吞吐量的平均值比其他協(xié)議更大,但是隨著時間的行進使用New Reno協(xié)議時平均吞吐量更快趨于平穩(wěn)。以多Agent構成的自主運行體系能對比不同策略下星座運行的效率,作為導航星座自主運行的策略選擇的參考資料,根據(jù)不同的需求進行選擇,對自主運行系統(tǒng)的開發(fā)有一定的參考價值。
5結束語
導航星座自主運行技術是衛(wèi)星導航領域研究的前沿問題之一,本文通過Agent建模方法對自主運行系統(tǒng)的仿真建模做了一定的探索。基于多Agent的建模理念,本文提出了導航星座自主運行的體系架構和體系中各層級Agent的建模方法,給出了以導航星座協(xié)議棧Agent為核心的工作流程。仿真結果表明,由Agent構成的系統(tǒng)能夠?qū)Υ嬖诖罅繉嶓w之間通信與測量的自主運行系統(tǒng)進行仿真,還可以根據(jù)需求調(diào)整各種不同的策略進行實驗。本文的研究結果對衛(wèi)星導航系統(tǒng)自主運行相關的技術研究具有一定參考價值。
參考文獻
[1] 陳忠貴.基于星間鏈路的導航衛(wèi)星星座自主運行關鍵技術研究[D].長沙:國防科技大學,2012.
[2] 代樹武,孫輝先.航天器自主運行技術的進展[J].宇航學報,2003(1):17-22.
[3] SCHETTER T, CAMPBELL M,SURKA D.Multiple Agent-based autonomy for satellite constellations[J].Agent Systems, Mobile Agents, and Applications,Lecture Notes in Computer Science 1882: 151-165.
[4] MARSHALL M M. Goals for airforce autonomous spacecraft [R].AD-A 1054881981.
[5] 賀勇軍,戴金海,李連軍多衛(wèi)星系統(tǒng)綜合建模與仿真環(huán)境的設計與實現(xiàn)[J].計算機仿真,2004,21(5):28-31.
[6] 高黎.分布式衛(wèi)星系統(tǒng)自主運行體系結構模型研究[J].空間科學學報,2007 (3):239-244.
[7] 胡圣波,孟新,趙娜.基于模型的航天器自主運行智能執(zhí)行體[J].中南大學學報,2007 38(S1):61-66.
[8] 吳大愚.航天器自主運行軟件開發(fā)框架和自主規(guī)劃調(diào)度的研究[D].長沙:國防科技大學,2007.
[9] JENNINGS N R. On agent-based software engineering[J].Artificial Intelligence,2000,117(2):277-296.
[10]MACAL C M.AGENT-based modeling and simulation: ABMS examples[C].//Proceedings of the 2008 Winter Simulation Conference,2008.
[11]CASTI J. Would-be worlds: How simulation is changing the world of science[M].New York: Wiley, 1997.
冷如松(1991-),男,碩士,主要從事衛(wèi)星導航仿真系統(tǒng)仿真建模研究。
聞德保(1974-),男,教授,碩士生導師,主要研究領域為GNSS電離層、空間天氣等。
黃文德(1981-),男,博士,講師,主要從事航天器軌道動力學及衛(wèi)星導航系統(tǒng)技術研究。
Agent-based Autonomy Modeling and Simulation for Navigation Satellite Constellations
LENG Rusong1,2,WEN Debao1,HUANG Wende2,3
(1.CollegeofMechatronicsEngineeringandAutomation,NationalUniversityofDefenseTechnology,Changsha410010,China;2.CollegeofCommunicationsandTransportationEngineering,ChangshaUniversityofScienceandTechnology,Changsha410073,China;3.ShanghaiAstronomicalObservatory,ChineseAcademyofScience,Shanghai200030,China)
Abstract: Aimed at deficiencies of traditional modeling and simulation method, which fails to meet the requirements of communication and measurement among a number of entities for autonomy of navigation satellite systems, this paper investigates the approach to satisfy these requirements based on the theory of agent.First, modeling and simulation agent architecture of the autonomy system was proposed. Then structures and functions of entities of each level were designed. Finally, an agent of protocol stack was constructed to create the communication and measurement mechanism. The simulation results showed that the mechanism can deal with the problem of communication and measurement in the autonomy system, and it is valuable for the development autonomy of navigation satellite constellations.
Keywords:Navigation constellation; autonomy agent; modeling and simulation; protocol stack
doi:10.13442/j.gnss.1008-9268.2016.02.001
收稿日期:2015-11-13
中圖分類號:P228.4
文獻標志碼:A
文章編號:1008-9268(2016)02-0001-06
作者簡介
資助項目: 中國博士后基金項目(編號:2015M580365)
聯(lián)系人: 冷如松 E-mail:2563410101@163.com
