基于C-ALS采空區探測及三維建模技術研究
2016-06-20 03:20:38陳尚波
采礦技術 2016年1期
黃 彬,張 誠,陳尚波
(1.贛州稀土礦業有限公司, 江西 贛州市 341000;2.江西信德安全檢測檢驗有限公司, 江西 南昌 330001)
?
基于C-ALS采空區探測及三維建模技術研究
黃彬1,張誠1,陳尚波2
(1.贛州稀土礦業有限公司,江西 贛州市341000;2.江西信德安全檢測檢驗有限公司,江西 南昌330001)
摘要:由于傳統的采空區探測方法只能局限于二維探測,難以精確獲得采空區的三維空間形態.運用C-ALS空區精密探測系統對某礦采空區進行現場探測,在此基礎上,用Surpac三維建模軟件構建采空區的三維可視化模型,準確得到該采空區的三維空間信息,精確計算出該空區的體積和暴露面積,為礦山技術人員對空區的后續分析和處理提供了可靠的理論依據。
關鍵詞:激光掃描系統;采空區;三維可視化;Surpac
0引言
采空區是采礦工程主要的災害形式之一,其嚴重威脅礦區人員生命財產安全。大量采空區的存在,使得礦產資源開采條件惡化,導致礦柱變形破壞,相鄰工作區采場和巷道維護困難;更嚴重的可能會導致地下大面積冒落、巖層移動和地表沉陷,造成嚴重的人員傷亡和設備損壞,因此,如何準確獲取采空區的賦存情況、空間形態特征和冒落狀況等,一直都是困擾礦山技術人員進行空區安全管理及合理確定采空區處理方法的關鍵問題[1-3]。
采空區三維激光掃描系統(C-ALS)具有全自動掃描、操作方便、數據處理簡單等特點,同時探測人員無須進入空區。本文采用C-ALS 三維激光空區探測技術對陜西某采空區進行精密探測,在此基礎上,借助大型礦床建模軟件Surpac建立三維可視化空區模型,得到了空區的三維空間形態、空間位置,精確計算出空區體積,為礦山技術人員對空區的安全管理和控制提供了有效參考[4-7]。
1C-ALS工作原理及空區實體建模
1.1C-ALS工作原理及過程
C-ALS系統的基本構成包括激光掃描頭、電源、Boretrak探桿、數據接收器及數據處理軟件,主要是在掃描頭上配置一個集成激光測距儀,采用激光測距的原理,利用發射和接受激光脈沖信號的時間差實現對被測物體的距離測量,只要測出激光脈沖發射和接受信號所用的往返時間,即可自動計算出距離,空區探測步驟如下。
(1) 將C-ALS激光掃描頭組裝、連接并固定探桿;
(2) 借助計算機控制器初始化掃描頭,并設置掃描參數,包括探測數據文件名稱和掃描精度等;
(3) 掃描頭的水平位置歸零并開始掃描,該掃描系統會自動將掃描點云數據轉發給計算機控制器,方便技術人員立即對探測的效果進行查看;
(4) 掃描完一周后,探頭會按照預設的參數旋轉一個角度(通常為1°~3°)進行下一次掃描,直至掃描過程結束,計算機控制器會自動將探測數據保存;
(5) 將探測數據進行處理與計算。
1.2采空區實體建模
采空區現場探測主要保存空區壁與探測點的角度和距離,因此在使用數據前,需要對原始數據進行處理,用C-ALS自帶的處理軟件Cavityscan將“.MDL”原始探測數據文件初步處理后轉換為“.DXF”格式文件,運用大型礦山建模軟件Surpac生成空區實體模型。
2工程應用
某金礦5#礦體經前期開采,在69線~73線之間存在一長度約100 m,垂直高度約100 m,寬度約20~40 m的大采空區。該大采空區涉及的中段包括1520~1600 m中段,地壓顯現明顯,其中71線~73線之間部分空區已塌陷至地表。為全面了解該大采空區體積、形狀及其所處空間位置,采用C-ALS三維探測系統,對該大空區進行了掃描,輔以Surpac軟件建立了該大采空區的三維實體模型,計算得出該采空區的體積,為后期處理空區提供科學依據,并提高技術人員和設備的安全性。
2.1采空區C-ALS現場探測
(1) 設備架設:根據現場情況,將探桿水平放置緩慢伸入空區,為了避免出現盲區和保證探測效果,設計了3根2 m長的加長桿,探測時固定在連接桿上。
(2) 空區探測:設備安裝妥當后,啟動計算機控制器,設置掃描參數(本次角度設置為1°),開始探測;
(3) 測定激光探頭坐標及方位:通過測量出激光掃描頭上兩點坐標并計算出該方位角,就能夠將空區探測的數據用于礦區地質坐標系中,并可以精確每個掃描點的坐標,本次探測坐標見表1。
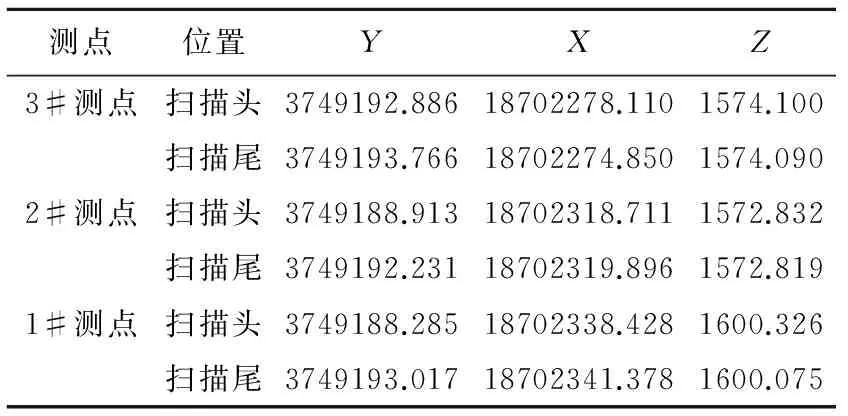
表1 測點坐標
(4) 多點探測:為消除探測盲區,每個空區選取至少兩個以上測點,探頭定位如圖1所示,分別對空區進行探測,本次探測掃描總共布置了3個測點。
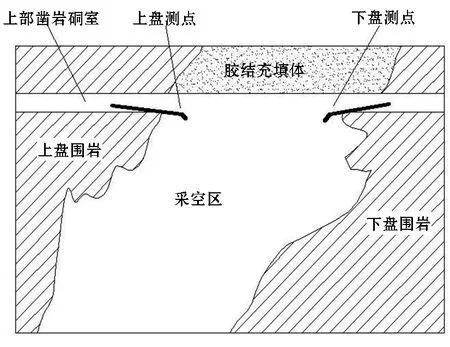
圖1 采空區現場探測
2.2采空區三維模型可視化
通過掃描采空區,可以得到采空區原始形態數據,將數據導入附帶軟件CavityScan中進行前期處理,得到C-ALS探測掃描“點云”數據,并將數據導出為“.str”格式文件,在Surpac建模軟件中生成DTM三維模型。空區三維模型可視化過程見圖2。
其中,1#測點采空區掃描點241208個,經濾點后220550個;最大長度89.5 m;最大寬度36.3 m;最大高度87.4 m;空區體積90547 m3;空區不規則,呈“扇狀”。
2#測點空區掃描點295673個,經濾點后271644個;最大長度82.1 m;最大寬度28.8 m;最大高度73.7 m;空區體積87745 m3;空區不規則呈“錐形”。
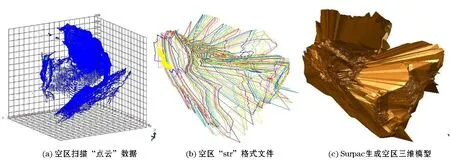
圖2空區三維模型可視化
3#測點空區掃描點105542個,經濾點后98540個;最大長度61.2 m;最大寬度17.6 m;最大高度53.5 m;空區體積42683 m3;空區不規則,呈“碗型”。
通過對采空區的掃描,得到采空區的邊界與測點的角度和距離值,進一步由每個測點繪制空區形態模型,并根據3個測點的坐標,對3測點所得到的大采空區進行耦合,得到大采空區三維模型(見圖3)。
準確掌握采空區的體積大小可以為空區充填及安全管理控制等工作提供重要的依據。在空區三維實體模型耦合生成的基礎上,經有效性驗證,運用Surpac軟件計算出空區體積、表面積及空區在X、Y、Z軸上的最大值與最小值,如表2所示。
空區暴露面積的大小直接關系到采空區的穩定性.因此,準確把握采空區暴露面積的大小對采空區安全評價,特別是頂板及圍巖應力分析有重要意義。基于C-ALS探測數據生成采空區三維模型,由軟件計算得出空區的暴露面積,根據采空區傾角與平面平均尺寸得到頂板暴露面積[11-15]。
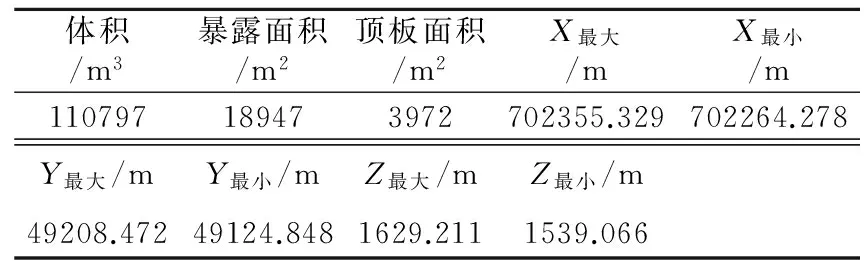
體積/m3暴露面積/m2頂板面積/m2X最大/mX最小/m110797189473972702355.329702264.278Y最大/mY最小/mZ最大/mZ最小/m49208.47249124.8481629.2111539.066
3結論
(1) 介紹了C-ALS空區探測系統的基本原理及采空區三維實體建模的方法,并完成對該礦山某采空區的探測工作,準確獲得了該空區形態,借助Surpac軟件建立了空區三維實體模型,實踐表明,C-ALS系統是開展采空區精密探測研究的有效手段。
(2) 通過對采空區的探測,可以準確地確定采空區的三維信息,對空區進行定量和定性,為后期空區的治理提供科學、可靠地依據。
參考文獻:
[1]馬海濤,劉勇鋒,胡家國.基于C-ALS采空區探測及三維模型可視化研究[J].中國安全生產科學技術,2010,6(3):38-41.
[2]李同鵬,王亨炎,婁廣文.CMS探測系統在采空區測量中的應用與實踐[J].金屬礦山,2010(4):110-113.
[3]過江,羅周全,鄧建,等.三維動態空區監測系統CMS 在礦山的應用[J].地下空間與工程學報,2005,1(7):994-996.
[4]羅周全,熊立新,劉曉明,等.CMS-VRML耦合的網絡環境下采空區三維可視化方法[J].礦業研究與開發,2010,30(6):53-55,71.
[5]劉曉明.基于實測的采空區三維建模及其衍生技術的研究與應用[D].長沙:中南大學,2007.
[6]張新光,張金龍,朱和玲.空區激光自動掃描系統(CALS)的研究與應用[J].采礦技術,2009,9(1):70-72.
[7]李夕兵,李地元,趙國彥,等.金屬礦地下采空區探測、處理與安全評價[J].采礦技術,2006,23(1):24-29.
[8]羅周全,鹿浩,劉曉明,等.基于空區探測的采場超欠挖量計算及頂板安全分析[J].金屬礦山,2007,378(12):36-38.
[9]馮福康,羅周全,沈玉眾,等.采空區三維探測建模及采場回采指標可視化[J].礦業研究與開發,2011,11(1):16-18,66.
[10]張耀平,彭林,劉圓,等.基于C-ALS實測的采空區三維建模技術及工程應用研究[J].礦業研究與開發,2012,32(1):91-94.
[11]南世卿,楊楠.基于CMS實測的露天轉地下開采采空區群穩定性分析[J].河北冶金,2012(8):10-15.
[12]陸剛.基于CMS實測的采空區穩定性分析[J].采礦技術,2012,12(1):57-59
[13]張耀平,劉波,龔囪,等.基于實測的采空區隱患分析及治理研究[J].礦業研究與開發,2012,32(4):69-71.
[14]江文武,李國建.基于C-ALS的空區頂板覆巖冒落分析研究[J].有色金屬科學與工程,2012,3(5):66-69.
[15]曾凌方,李夕兵,劉希靈,等.欒川三道莊鉬礦地下采空區三維模型的建立與可視化研究[J].礦冶工程,2008,28(3):31-33.(收稿日期:2015-10-09)